
Fターム[2G051AC16]の内容
光学的手段による材料の調査の特殊な応用 (70,229) | 調査・分析手法 (2,013) | 調査、分析手段の移送;ハンドリング (319) | 自走車 (93)
Fターム[2G051AC16]の下位に属するFターム
管体内部検査用 (64)
Fターム[2G051AC16]に分類される特許
1 - 20 / 29
自走式管内検査カメラ装置および管径変換ユニット
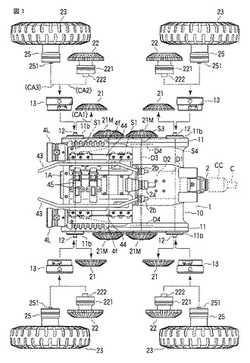
【課題】2倍強の管径差をもつ広範な管径(350mm〜800mm)を対象に、検査対象となる配管内を円滑にかつ適正な速度で走行して、管内を斑なく的確に観察できる自走式管内検査カメラ装置を提供する。
【解決手段】走行ユニットを構成する管径変換ユニット1と管径変換ユニット1に選択的に結合される管径変換アダプタ用取付アダプタ13および第1乃至第3の管径変換アダプタ(CA1)〜(CA3)とにより複数種の管径に対応した自走式管内検査カメラ装置の管径変換ユニットを構成している。
(もっと読む)
レール敷石陥没検出装置

【課題】本発明はレールに敷設された石(バラスト)の陥没穴を迅速に検出することで、車両の転覆、脱線等の事故を未然に防止するものである。
【解決手段】本発明のレール敷石陥没検出装置は、上記の目的を達成するために、通常運行時の列車の先頭車両の前方に搭載した近赤外線照明により、レールに敷設された石(バラスト)に近赤外光を照射し、その画像を近赤外光のみを通す光学フィルタを通してラインセンサカメラで撮像し、その映像を走査方向に積算することで、バラストと陥没穴を区別し、陥没穴を自動的に検出する。
(もっと読む)
外観検査方法
【課題】表面に凹凸を有する検査対象物の光沢を検査することができる外観検査方法を提供する。
【解決手段】傾斜面12を有する凹凸が表面に形成された検査対象物Bの光沢を検査する外観検査方法である。前記検査対象物Bの表面から離間した位置に、光源3と受光器2とを前記検査対象物Bの表面からこの順で配置し、前記受光器2から前記検査対象物Bの表面に前記光源3を投影した位置を基準として前記検査対象物Bの表面の対称な位置を二つの検査領域B1、B2とし、前記光源3から前記検査対象物Bの表面に光L1、L2を照射し、前記二つの検査領域B1、B2からの反射光L3、L4を前記受光器2で受光し、前記受光器2で受光した反射光L3,L4から得られる前記各検査領域B1、B2の測定値を比較して前記測定値の差が所定の閾値以下か否かを判定する。
(もっと読む)
トンネル壁面の展開画像取得システム
【課題】トンネル壁面の展開画像を取得するシステムについて、得られた立体視可能な展開画像が現実の壁面の状態を正確に反映できるようにし、その反映の度合いを簡単に判定できるようにする。
【解決手段】システム10は、トンネルを走行する車両11と、車両11に搭載されたビデオカメラ12と、各ビデオカメラ12が撮像した画像データを処理可能な画像処理部13とからなる。画像処理部13は、画像データの各コマ上の第1および第2ラインから短冊形の第1および第2視差画像をサンプリングし、両ラインの中間から短冊形の直視画像をサンプリングする。各画像を横方向に配列してカメラ12ごとに第1および第2視差連続画像、直視連続画像を合成する。各連続画像を縦方向に配列して、第1および第2視差展開画像、直視展開画像を合成する。第1および第2視差展開画像を赤または青の着色画像として出力して立体視可能とする。これとフルカラー画像として出力した直視展開画像を比較可能とする。
(もっと読む)
ガラス板の端面撮像装置およびその撮像方法
【課題】搬送中のガラス板を停止させることなく、搬送方向に直交する向きの直交端面及びその近傍を撮像することのできるガラス板の端面撮像装置およびその撮像方法を提供する。
【解決手段】本発明に係るガラス板の端面撮像装置5は、水平状態でガラス板を所定方向に搬送する搬送手段3と、搬送手段3で搬送されるガラス板2の搬送方向と直交する向きの直交端面4a(4b)及びその近傍を撮像する撮像手段7(7a,7b)と、撮像手段7(7a,7b)を、ガラス板2の搬送方向に対して斜め方向に移動させる移動手段8と、ガラス板2の搬送時、撮像手段7(7a,7b)と直交端面4a(4b)との距離を一定に保ちつつ、撮像手段7(7a,7b)を移動手段8により直交端面4a(4b)に沿って移動可能とする移動制御手段9とを具備している。
(もっと読む)
水中溶接部検査装置
【課題】検査対象の表面の状態によって、使い分けが可能な渦流探傷装置を提供すること。
【解決手段】CCDカメラ20は、対象物の撮影を行う撮影装置20aと、撮影によって得た映像を外部に出力する映像出力装置20bからなり、渦流探傷プローブ11は、対象物における欠陥の検知を行う検知装置12と、検知によって得たデータを目視で欠陥の認識が可能な形式に画像処理を行う画像処理装置13と、画像処理によって画像処理データを外部に出力する画像処理データ出力装置14と、からなり、CCDカメラ20の周囲に複数台設置されている。
(もっと読む)
画像データ処理システム
【課題】長い距離にわたるコンクリート壁面などのコンクリート構造物の診断を、安価にしかも短時間で行うことが可能な画像データ処理システムを提供する。
【解決手段】移動式架台10に搭載された可視画像撮影用カメラ60と赤外線カメラ70と、最初の可視画像データ及び赤外線画像データに撮影された対象物上の基準点に基づいて、前記複数の可視画像データ及び赤外線画像データの位置関係を求め、前記最初の可視画像データ及び赤外線画像データに対して、あおり補正を施した上で、2番目以降の規格化可視画像データ及び規格化赤外線画像データを、前記位置関係に基づいて重畳し2番目以降の重畳データとし、前記最初の重畳データと前記2番目以降の重畳データとを連結することを特徴とする。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
橋梁点検装置
【課題】 橋梁下面の外観検査を、作業員が容易かつ効率的に行うことができ、なおかつ一定以上の検査精度を確保することができる橋梁点検装置を提供する。
【解決手段】 橋梁100上に配置される支持体2と、支持体2に支持される形で橋梁100上からその側方に向けて延出し、橋梁100の側方外側を回り込む形で、延出先端部のカメラ4を橋梁100の下面よりも下側に位置させる屈曲変形可能なアーム部材3を備え、カメラ4によりによって橋梁100の下面を少なくとも正対方向Qとは異なる斜め方向Pから撮影された場合であっても、その橋梁下面画像を補正して、正対方向Qから見た正対画像とすることができ、これを表示出力することができる。
(もっと読む)
画像検査方法および画像検査装置
【課題】マニュアルでの補正や多大な処理時間を必要とせず、ビデオ撮影装置の位置およびビデオ撮影装置の位置と撮影対象物までの距離から求められる撮影している画角の座標を、撮影画像のフレームと同期させてビデオ撮影装置の記録チャンネルに記録する。
【解決手段】走行する車両からビデオ撮影装置でコンクリート構造物の表面劣化を検査する方法において、ビデオ撮影装置の位置およびビデオ撮影装置の位置と撮影対象物までの距離から求められる撮影している画角の座標を、撮影画像のフレームと同期させてビデオ撮影装置の記録チャンネルに記録する。
(もっと読む)
画像検査方法および画像検査装置
【課題】マニュアルでの補正や多大な処理時間を必要とせず、ビデオ撮影装置で撮影している範囲内の任意の位置情報とビデオ撮影装置で撮影しているフレーム毎の範囲を撮影画像フレームと同期させて記録する。
【解決手段】走行する車両からビデオ撮影装置等でコンクリート構造物の表面劣化を検査する方法において、ビデオ撮影装置で撮影している範囲内の任意の位置情報をビデオ撮影装置の移動装置に取り付けた位置検出装置から求めるとともに、ビデオ撮影装置で撮影しているフレーム毎の範囲を、ビデオ撮影装置から撮影対象物までの距離情報から求め、撮影画像フレームと同期させて記録する。
(もっと読む)
分岐器検査装置
【課題】簡易な構成で一律の安定した精度で測定することができる操作性に優れた分岐器検査装置を提供する。
【解決手段】軌道上を走行可能な台車21と、台車21の走行距離を測定する距離センサ25と、測定対象物の形状を測定するレーザ式変位センサ29と、レーザ式変位センサ29を測定対象側レール11の軌間測定点Pの鉛直線上に常に位置させるスライドガイド27と、測定制御装置40とを有する。測定制御装置40は各測定位置情報、測定情報を記憶する基本データ記憶部、測定データ記憶部、入力部、表示部及び制御部を備える。制御部は台車21の走行距離が測定位置情報に一致した時に測定情報、走行距離を表示部に表示させ、入力部からの入力によりレーザ式変位センサ29を作動させて測定を行わせ、測定データを表示部に表示させると共に測定データ記憶部に格納する。
(もっと読む)
蒸気発生器の上バンドル検査ツール
蒸気発生器の内部を検査するための検査システムは、一態様では、第1ブームと、第1ブームに枢動的に取り付けられた近位端と、供給カプセルに耐える遠位端とを有する第2の伸縮ブームであって、供給カプセルはストレージベイを画定する第2の伸縮ブームとを含む。検査システムは、供給カプセルのストレージベイに適合するように寸法づけられ、ストレージベイを画定する第1のロボット検査車両を含む。第1のロボット検査車両は、少なくとも一つの検査カメラ及び少なくとも一つの照明システムを含む。第1のロボット検査車両は、第1ロボット検査車両を供給カプセルに接続するケーブルを更に含む。検査システムは、第1ロボット検査車両のストレージベイに適合するように寸法づけられた第2のロボット検査車両を含む。第2のロボット検査車両は、少なくとも一つの検査カメラ及び少なくとも一つの照明システムを含み、第2のロボット検査車両を第1のロボット検査車両に接続するケーブルを更に含む。 (もっと読む)
配管内面監視装置及び方法
【課題】検査員が配管の外部から配管内面の状態を容易に監視でき、超音波探傷試験による的確な配管減肉管理を行うことができる配管内面監視装置及び方法を提供することである。
【解決手段】配管内面を撮影するカメラを搭載して配管内を走行する配管内移動体12と、配管の表面を走行する配管表面走行体13と、配管表面走行体が配管内移動体に連動して走行するように配管表面走行体13と配管内移動体12との位置合わせを行う位置合わせ装置24と、配管表面走行体13に搭載されて配管内移動体12のカメラ23で撮影された影像を配管11の内面位置に対応する配管11の表面位置に映写するプロジェクタ25と、配管内移動体12及び配管表面走行体13の走行を制御するリモコン15とを備える。
(もっと読む)
画像処理装置、長尺物用検査装置及びコンピュータプログラム
【課題】 高解像度の画像を得て、検査精度の信頼性を高め、特に、高速で移動しながら長尺物を撮影して検査を行うのに適する画像処理装置を提供する。
【解決手段】 被検査物たる長尺物の撮影を行うラインセンサ11が、長尺物の長手方向に沿って移動する移動体に複数本設けられており、画像処理装置20が、各ラインセンサ11にて撮影された各撮影データを取得して、複数枚の撮影データを2次元画像として合成し、この2次元画像を分析して異常箇所の有無を判断する構成である。複数のラインセンサ11で撮影された複数枚の撮影データを合成するため、得られる2次元画像は解像度が高い。これにより、移動体10が長尺物100の長手方向に沿って高速で移動しても、解像度の高い画像が得られることから、異常箇所の有無の検出精度が向上する。
(もっと読む)
打痕検査装置及び打痕検査方法
【課題】打痕検査に要する手間や時間を低減すること。
【解決手段】打痕検査装置100は、炉底管910の一部を覆うと共に炉底管910の表面に付着している付着物を炉底管910の表面から剥離させるデスケーラー部200と、炉底管910の一部を覆うと共に炉底管910の表面から剥離された付着物を取り除いて清掃する清掃部300と、炉底管910に沿って移動しながら清掃部300によって清掃された炉底管910の表面に、表面から凹んだ打痕があるか否かを検査する打痕検査部400と、を含んで構成される。
(もっと読む)
自走式管内検査ロボット
【課題】簡素な構成で走行用駆動モータの停止と正回転及び/又は逆回転の切り替えを簡便かつ確実に行うことができ、専任のオペレータや大掛かりな設備が不要で、量産性、操作性に優れ、短時間で効率よく、下水管の内壁の表面を撮影することができ、検査作業の効率性に優れる自走式管内検査ロボットの提供。
【解決手段】走行用駆動モータと、走行用駆動モータの停止と正回転及び/又は逆回転の切り替えを行う駆動切り替えスイッチと、駆動切り替えスイッチに連結された紐状操作部と、を備えている。
(もっと読む)
卵形管用自走式管内検査ロボット
【課題】逆卵形に形成された下水管の中を安定して自律走行することができ、専任のオペレータや大掛かりな設備が不要で、取扱い性に優れ、管内に凹凸、陥没、継ぎ目の位置ずれ、枝管の開口部などがある場合だけでなく、管が傾斜している場合や曲がっている場合でも、管に沿って確実に出口に向かって走行することができ、短時間で効率よく、内壁の表面を撮影することができ、検査作業の信頼性、効率性に優れる卵形管用自走式管内検査ロボットの提供。
【解決手段】フレームと、フレームの下部にハの字型に配設され卵形管の側壁部に当接する左右の無限軌道部と、フレームの進行方向側の先端部に配設されたカメラと、進行方向を照らす照明部と、カメラで撮影した画像を記憶する記憶部と、無限軌道部を駆動する駆動モータと、駆動モータに電力を供給するバッテリと、を備え、左右の無限軌道部の間の下部中央にバッテリ及び/又は重錘部が配設されている。
(もっと読む)
自走式管内検査カメラ装置
【課題】管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れる自走式管内検査カメラ装置を提供する。
【解決手段】検査対象管内を走行可能な走行ユニット11と、走行ユニット11に搭載され検査対象管内を観察するカメラユニット35と、走行ユニット11の左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸18を中心として上下方向に揺動自在な少なくとも2対のスイングユニット17a,17bと、各スイングユニット17a,17bの前後方向の両端部に設けられた車輪21a,21bと、走行ユニット11に搭載された駆動モータ23と、駆動モータ23の回転力をスイング軸18を介して各車輪21a,21bに伝達させて走行ユニット11を走行させるとともにスイングユニット17a,17bをスイング軸18を中心として揺動させる回転トルクを作用させる回転力伝動機構34とを具備したことを特徴とする。
(もっと読む)
自走式管内検査カメラシステム
【課題】自走車ユニットおよびLED照明部を有するカメラユニットを備えた自走式管内検査カメラ装置と前記自走式管内検査カメラ装置を制御する制御装置との間を長距離ケーブルで接続した自走式管内検査カメラシステムに於いて、上記ケーブルの芯線からLEDの点灯駆動に専用の電源供給用芯線をなくしてケーブルの小径化、軽量化を図るとともに、LEDを設定輝度に従い定電流制御して、長期に亘る安定したLED照明を可能にした。
【解決手段】撮像部21と照明部22のカメラ電源を共通に用いて、照明部22のLEDを設定輝度に従い定電流制御する。
(もっと読む)
1 - 20 / 29
[ Back to top ]