
Fターム[3C007AS24]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 半導体、ディスク製造用 (342)
Fターム[3C007AS24]に分類される特許
21 - 40 / 342
多関節ロボットアーム型搬送装置の軌道情報生成装置
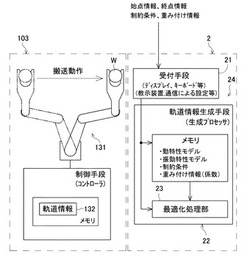
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
リンク式ロボットアーム装置

【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
真空処理装置
【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
真空ピンセット及び真空吸着方法
【課題】反りがある半導体ウエハに対して、安定して吸着することができ、かつ、半導体ウエハを平らに矯正することができる真空ピンセット。
【解決手段】本体2と、本体2の端部に設けられた支持部3と、一端が支持部3に接続され、他端に吸着部5を備えた複数の先端部材4と、を少なくとも備え、先端部材4と支持部3と本体部2の内部に吸引流路10a〜10cが設けられた、反りを有する平板状の被処理体用Wの真空ピンセット1Aであって、複数の先端部材4は、反りの形状に合わせるように、及び、反りを矯正するように、支持部3に対して可動であることを特徴とする真空ピンセット1A。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 内軸用のマグネットと外軸用のマグネットとを一体とすることで、低コストのアクチュエータを提供すること。
【解決手段】 アクチュエータは、中空構造を有し、中空構造の内側を真空排気可能に構成され、中空構造の外周側で第1コイル部を保持するハウジングと、ハウジングの内部において回転自在に支持され、外周に第2コイル部を有する内軸と、内軸の回転軸と同軸にハウジングの内部において回転自在に支持されており、内軸の外周側を囲むように配置されている円筒状の外軸と、外軸の外周側で第1コイル部に対向し、外軸の内周側で第2コイル部に対向する磁石と、内軸とハウジングの一方に設けられた整流子と、内軸とハウジングの他方に設けられ、内軸が少なくとも回転する際には整流子と摺接するブラシと、を備え、第2コイル部は、整流子とブラシを介して給電される。
(もっと読む)
産業用ロボット
【課題】アームを支持する支持部材を上下方向へ移動可能に支持する柱状部材を備えている場合であっても、比較的簡易な構成で、搬入される搬送対象物の位置ずれを抑制しつつその傾きを適切に補正することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向へ移動可能に支持する柱状部材7と、基台8と、柱状部材7の下端を支持するとともに基台8に対して回動可能な旋回部材9と、基台8に対して柱状部材7を上下方向に直交する所定方向へ相対移動させる移動機構10とを備えている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第1ステータと、第2ロータと、第2ステータとを備える。第1ロータの回転軸を基準として、第1ロータおよび第2ロータは同心円状に配置され、第1ロータの回転軸を基準として、第1ステータおよび第2ステータは同心円状に配置されている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第2ロータと、ステータとを有する。第1ロータの回転軸を基準として、第1ロータおよび第2ロータおよびステータは同心円状に配置される。ステータは第1ロータと第2ロータとの間に配置されており、第1ロータと対向する第1コイルと、第2ロータと対向する第2コイルと、を有する。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、本体2の端部に設けられ、平坦部を有する先端部3と、先端部3の平坦部3aに設けられた複数の突部4と、を備え、突部4のうち少なくとも1つが、可撓性を有する材料からなる吸着部4であることを特徴とする真空ピンセット1を提供する。
(もっと読む)
ワーク端部検出機構及びワーク搬送機構
【課題】 照明装置を追加することなく、アライメント用カメラでワーク端部を明瞭に観察できるワーク端部検出機構及び該ワーク端部検出機構を利用したワーク搬送機構を提供する。
【解決手段】 一方の端部に開口部を有し、他方の端部に閉塞部材を有する筒状の胴部材からなるワーク端部検出機構であって、前記閉塞部材の下面側に、前記開口部から入射した光を反射するための光反射手段が設けられており、かつ、前記胴部材の開口部側の内径(φ1)よりも、前記閉塞部材側の内径(φ2)の方が大きいことを特徴とするワーク端部検出機構。前記胴部材の内部に空気吸引口を穿設し、胴部材の上部に真空吸着ヘッドを配設することによりワーク端部検出と共に真空吸着によるワーク搬送も可能になる。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、この本体2の端部に設けられ、複数の吸着面4〜6を有する吸着部3と、吸着面4〜6毎に少なくとも一つ設けられ、被処理体を吸着する吸着孔7と、を備え、少なくとも一つの吸着面は、一辺に屈曲部11を有し、被処理体に対して吸着孔7が接近又は離間するように、屈曲部11を中心に回動可能に構成されていることを特徴とする真空ピンセット1を提供する。
(もっと読む)
ロボットアーム
【課題】トランスファーチャンバ内の汚染を抑制することができるロボットアームを提供する。
【解決手段】ロボットアーム100は、半導体ウエハを搬送するロボットアームであり、ハンド2と前腕リンク10と上腕リンク14を備えている。ハンド2は、第1関節20を介して前腕リンク10に連結している。上腕リンク14は、第2関節11を介して前腕リンク10に連結している。ロボットアーム100では、前腕リンク10が、第1関節20と第2関節11の間で分割可能に構成されている。
(もっと読む)
板状部材の支持装置および支持方法
【課題】板状部材の一方側の面に凸部および凹部が形成された場合でも適切に保持することができる板状部材の支持装置および支持方法を提供すること。
【解決手段】ウェハWの外縁に沿った環状の枠体5を備えて保持手段3が構成され、凸部WB表面に対向する吸引口7から空気を吸入することによって、ウェハWの凹部WCに吸引力を作用させることなくウェハWを吸引保持することができ、ウェハWに作用するストレスを低減させつつウェハWを適切に保持することができる。
(もっと読む)
産業用ロボット
【課題】小型化が可能でかつパスラインを低くすることが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、本体部3と、第1アーム4と、第2アーム5と、第3アーム6と、本体部3と第1アーム4とを繋ぐ第1減速機21と、第1アーム4と第2アーム5とを繋ぐ第2減速機22と、第1減速機21の入力軸25と第2減速機22の入力軸32とを連結する連結機構23と、第3アーム6を回転駆動する第2駆動用モータ40とを備えている。産業用ロボット1では、第2アーム5と第3アーム6とを繋ぐ第3関節部の移動軌跡が直線状となるように、第1減速機21の減速比および第2減速機22の減速比が設定されるとともに、連結機構23が所定の速比で入力軸25と入力軸32とを連結している。また、第2駆動用モータ40は、第2アーム5の、第3関節部よりも先端側に、かつ、第1アーム4側へ突出するように第2アーム5に取り付けられている。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
ウェハ搬送装置およびウェハ搬送方法
【課題】ウェハのデバイスが形成された面または形成される面に吸着痕や損傷を生じさせることなくウェハを搬送することができるウェハ搬送装置およびウェハ搬送方法を提供すること。
【解決手段】搬送ハンド30の内部には、段差部24に設けられた吸着孔32と、複数の通気用の孔31,33とが設けられている。段差部24は、リブウェハ10のデバイス面2と重ならない位置に設けられている。第1通気用の孔31は、吸着孔32に接続されている。各第1通気用の孔31同士は互いに独立している。各第1通気用の孔31には、異なる第2通気用の孔33が接続されている。各第2通気用の孔33は、それぞれ異なる配管25を介して真空発生源26に連結されている。つまり、複数の吸着孔32に対する真空系統が互いに独立して設けられている。リブウェハ10の吸着状態は、搬送ハンド30の内部に流れる空気の流速に基づいて判定される。
(もっと読む)
21 - 40 / 342
[ Back to top ]