
Fターム[3C007AS24]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 半導体、ディスク製造用 (342)
Fターム[3C007AS24]に分類される特許
41 - 60 / 342
関節装置及び基板搬送装置
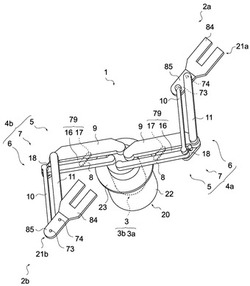
【課題】俊敏な動作と高精度な位置制御を可能とする関節装置及び基板搬送装置を提供すること
【解決手段】本発明の関節装置は、第1の平行リンクと、第2の平行リンクと、伝達機構とを具備する。第1の平行リンクは、第1の支点を中心とする第1の回転が可能な第1のレバーと、第2の支点を中心とする第2の回転が可能な第2のレバーとを有する。第2の平行リンクは、第1の支点を中心とする第3の回転が可能な第3のレバーと、第2の支点を中心とする第4の回転が可能な第4のレバーとを有する。伝達機構は、第1の支点を中心として第1の回転と共に回転する第1のギアと、第2の支点を中心として第2の回転と共に回転する第2のギアと、第1のギア及び第2のギアに噛合して回転する第3のギアと、前記第3のギアの回転と第3の回転及び第4の回転とを同期させる連結部とを有し、第1の平行リンクの駆動と第2の平行リンクの駆動とを連動させる。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。

【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
ウエハ搬送ロボット及びウエハの解放方法
【課題】ウエハの把持を解放した後におけるウエハの位置ズレを抑え、且つウエハの搬送に要する時間を短縮する。
【解決手段】ウエハ2が載置されるハンド20と、ウエハ2が載置される載置位置Aからウエハ2をハンド20から降ろす降ろし位置Dまでハンド20を移動させるための移動装置10において、ハンド20は、載置されたウエハ2を受け部23に押圧してウエハ2を把持し、且つ、押圧を解除してウエハ2を解放するための押圧装置30を備えており、制御装置40は、載置位置Aにてウエハ2が載置されると押圧装置30を制御してウエハ2を把持し、移動装置10を制御してハンド20をウエハ2を押圧する方向に移動させながら減速して降ろし位置Dへと移動させ、且つ、ハンド20が減速している間に、押圧装置30を制御してウエハ2を解放させるように構成されている。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法
【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
薄板材料の吸着装置
【課題】薄板材料の吸着に際しての空気漏れをなくすとともに薄板材料の取り外しを容易にする。
【解決手段】重ね合わせた一方のプレート3及び他方のプレート2の各々が対向することで形成された吸気通路53内の空気を吸気孔43より吸引すると、薄板材料10の外縁部10aが先端側に形成された吸引部5内の、案内部51に案内されて、案内部51に連続する吸着部52に進入し、他方のプレート2の壁面231が薄板材料10の外縁部10aに対向し、他方のプレート2の吸着面22が薄板材料10の外縁部10aの他方の縁部10a1に当接し、他方のプレート2の通路面24の終端にある第二段部(平面部)26の縁部261を支点として、一方のプレート3が他方のプレート2側へ撓み、一方のプレート3の吸着面32が薄板材料10の外縁部10aの一方の縁部10a1に当接することで薄板材料10を吸着して保持する、薄板材料の吸着装置1を提供する。
(もっと読む)
荷電粒子ビーム装置及び搬送ロボットのティーチング方法
【目的】搬送ロボットをチャンバ等に衝突させずにティーチング可能な装置を提供することを目的とする。
【構成】本発明の一態様の荷電粒子ビーム装置は、ロボットハンド143を有し、荷電粒子ビームが照射される基板をロボットハンドに配置して搬送する搬送ロボット142と、搬送ロボットによって基板が搬送される描画室103と、搬送ロボットの移動位置をティーチングする際のロボットハンドの予定位置を示す予定位置座標を入力し、予定位置座標にロボットハンドを移動させた際にチャンバに干渉するかどうかを検証する検証部14と、検証の結果、干渉しない場合に、予定位置座標にロボットハンドを移動させるロボットコントローラ114と、検証の結果干渉しない予定位置座標をティーチング座標として登録する登録部16と、を備えたことを特徴とする。
(もっと読む)
基板搬送用ロボットアームのフォーク構造
【課題】基板搬送用ロボットのハンド部のフォークに対して要求される耐熱性要求、剛性要求、軽量化要求を満たすと共に、長尺化要求をも満たすフォーク構造を提供する。
【解決手段】基板に薄膜処理を施す際に使用する基板を搬送するロボットのハンド部に使用されるフォーク構造において、幅方向に複数枚の板状部材11,12,13を連ね、当該連ねられた複数枚の板状部材を長手方向に複数段継ないだ梁状構造物をなし、当該連ねられた複数枚の板状部材を長手方向に継ぐ位置において、基端側の複数枚の板状部材と先端側の複数枚の板状部材が互い違いに重なり合っており、当該複数の板状部材が互い違いに重なり合っている部位の少なくとも2箇所において、複数個のボルト・ナット51a等による機械的な締結部品や凹凸面の嵌合によるせん断荷重伝達手段51を設けた構成のフォーク構造とした。
(もっと読む)
エッジグリップ装置、及びそれを備えるロボット。
【課題】 半導体プロセス用ウエハを把持した後、素早く移動させることができるエッジグリップ装置を提供する。
【解決手段】 チャックハンド1は、半導体プロセス用ウエハ3をフロントガイド12に向かって押圧して半導体プロセス用ウエハ3を把持するプッシャー25を有する押圧機構14を備えている。押圧機構14は、プッシャー支持体22と、緩衝部材28とを更に有している。プッシャー支持体22は、進退できるよう構成され、前後にスライドできるようにプッシャー25に設けられている。プッシャー支持体22は、その前方に隙間26aがあいている。隙間26aには、反発力が小さく弾性変形可能な緩衝部材28が介在している。プッシャー支持体22は、前進すると、緩衝部材28を介してプッシャー25を押されて前方に移動させる。プッシャー25は、半導体プロセス用ウエハ3に当たって押し付けられる。
(もっと読む)
ロボットハンド及びその製造方法
【課題】 高温下で使用することができるロボットハンド及びその製造方法を提供する。
【解決手段】 ロボットハンド1は、冷媒を流通させるための貫通溝5が延在する板状部材3と、貫通溝15を覆うように板状部材3の一方の主面3aに配置されたFRP成形体2と、貫通溝15を覆うように板状部材3の他方の主面3bに配置されたFRP成形体4と、を備えている。このロボットハンド1においては、板状部材3及びFRP成形体2,4によって冷媒が流通する流路が形成される。従って、その流路に冷媒を流通させることにより、炉に対してガラス基板を搬入及び搬出するなど、高温下で使用することが可能となる。
(もっと読む)
真空チャック
【課題】真空チャックに求められる吸着力で、吸着面の一部に載置される被吸着物を確実に吸着する真空チャックを提供する。
【解決手段】大気圧をP1、真空チャック1に求められる最小吸着力をFminとし、到達圧力がPu、排気効率がSeの真空ポンプ5で背面側が吸引される吸着パッド2が、吸着パッドの単位表面積と該単位表面積内に露出する貫通孔の総開口面積との比である開口率nと、多数の貫通孔による吸着パッド全体のコンダクタンスCが、
を満たす。(1)式を満たす真空チャック1は、被吸着物に覆われない吸着パッド2の一部から空気漏れがあっても、Fmin以上の吸着力で被吸着物を確実に吸着保持する。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
多関節型アーム装置及びステージ装置並びに露光装置
【課題】生産性の低下や露光処理等への悪影響を抑制する。
【解決手段】一対の接続部材AM11、AM12を所定の軸周りに回転自在に接続する関節部JT12を有する。関節部は、一対の接続部材を非接触で、所定の軸周り方向に相対的に回転自在、且つ所定の軸と直交する方向への相対移動を拘束するベアリング装置BR12を有する。
(もっと読む)
ロボットアーム及び搬送装置
【課題】ロボットアームを構成する部材に、高いアライメント精度を要求することなく、その動作を実現することができるロボットアーム及びこれを用いた搬送装置を提供すること。
【解決手段】ガイド機構10は、上述のガイド軸15と、これらガイド軸15の動きをガイドする部材としてガイドプレート16とを備えている。ガイドプレート16には、ガイド軸15が挿通されるガイド穴17aを形成するためのガイド穴形成部材17が固定されている。ガイド穴17aは、一方向であるX軸方向に長い形状に形成され、ガイドプレート16をベースとしてガイド軸15がX軸方向に移動するようにそれの動きをガイドする。軸受ローラ18の外周面18aと、ガイド穴形成部材17の内側壁17bとの間には隙間Qが設けられている。これにより、実質的に重力方向でガイド軸15の自由度を維持でき、ガイド軸15及び軸受ローラ18のY軸方向の動きの自由度も確保される。
(もっと読む)
アーム機構およびそれを備えた真空ロボット
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
搬送アームの洗浄方法、基板処理装置の洗浄方法及び基板処理装置
【課題】搬送アームに付着しているコンタミを除去する基板処理装置の制御方法を提供する。
【解決手段】基板の搬送を行うための静電チャックを有する搬送アームの洗浄方法であって、前記搬送アームに帯電している異物が付着している場合において、前記搬送アームに前記基板が載置されていない状態で、前記静電チャックの電極の各々に帯電している異物の電荷の極性と同じ極性の電圧を印加する電圧印加工程を有し、前記搬送アームに付着している異物を除去することを特徴とする搬送アームの洗浄方法を提供することにより上記課題を解決する。
(もっと読む)
基板吸着ユニットおよび基板吸着アセンブリ
【課題】本発明は、複数の基板を吸着するための基板吸着ユニットおよび基板吸着アセンブリに関する。
【解決手段】本発明は、複数の基板を吸着するための基板吸着ユニットおよび基板吸着アセンブリを提供し、基板吸着アセンブリは、固定フレームと、複数の基板吸着ユニットとを含む。各基板吸着ユニットは、各基板に対応して間隔をおいて固定フレーム上に固設され、各基板吸着ユニットは、真空装置に空圧的に接続し、本体と吸着部とを含む。本体は、真空装置に空圧的に接続し、吸着部は、本体の末端に対称的に設けられ、本体を介して真空装置に空圧的に接続し、基板のいずれかを均一に吸着するために用いられる複数の吸着部材を有する。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
基板搬送ロボット
【課題】大重量の基板を高い信頼性で搬送できる基板搬送ロボットを提供する。
【解決手段】本ロボットは、それぞれが基板を保持する第1及び第2基板保持部11,12を有し、さらに、第1及び第2基板保持部11,12が装着された第1及び第2アーム機構13,14を備える。第1アーム機構13は、主旋回軸を含む平面に関して互いに対称に配置された一対の第1アーム19を有し、第1アーム19のそれぞれが、その中間部にて内向きに折曲可能に構成されている。第2アーム機構14は、主旋回軸を含む平面に関して互いに対称に配置された一対の第2アーム20を有し、第2アーム10のそれぞれが、その中間部にて外向きに折曲可能に構成されている。
(もっと読む)
基板の移載装置、およびその方法
【課題】ベルヌーイチャックで基板を吸引保持するときのハンド部の位置精度を緩やかなものとしながら、吸引保持した基板の位置決めを基板自身で自動的に行なって、非接触状態での基板の移載を高速度で能率よく行なえる移載装置を提供する。
【解決手段】パラレルメカニズムのハンド部に、基板を非接触状態で吸引保持するベルヌーイチャックと、基板を位置決めする複数個のガイド体とを設ける。基板を吸引する際には、吸引開始位置におけるベルヌーイチャックをハンド部で位置保持して、ガイド体が基板の外郭線の外に位置する状態にして基板を吸引保持する。吸引保持された基板を、ノズル穴から吹き出される空気流で一方向へ旋回させ、旋回変位する基板の辺部をガイド体で受け止めて位置決めする。以上により、基板を吸引保持するときのハンド部の位置精度を緩やかにできる。さらに、吸引保持した基板の位置決めを基板自身で自動的に行なえる。
(もっと読む)
ロボットの防塵構造およびそれを備えたロボット
【課題】産業用ロボットの内部で発生する粉塵の拡散を防止する。
【解決手段】ロボットのハンドを有する作業軸30およびその周辺から発生する塵の拡散を防止する防塵構造60であって、蛇腹部65と前記蛇腹部65の両端にストレート部66a,66bとを有し、前記蛇腹部65で前記作業軸30を覆う蛇腹ホース62と、前記ストレート部66a,66bが嵌合する接続部を有し、前記作業軸30の軸線に沿って所定の間隔を空けて配置された2つのホース固定部61,63とを備え、前記ホース固定部61,63では、弾性部材68,69を介してクランプ材70,71で前記蛇腹ホース62の前記ストレート部66a,66bを前記接続部に締め付けることによって固定する。前記ストレート部66a,66bは、前記クランプ材70,71による締め付けに対して浮きを低減させるため、ストレート部の円周方向に沿って複数形成された薄肉部からなる緩衝部を有している。
(もっと読む)
41 - 60 / 342
[ Back to top ]