
Fターム[3C007BT14]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | ハンド部を移動させるもの (155) | ハンドを進退させるもの (127)
Fターム[3C007BT14]に分類される特許
101 - 120 / 127
付着式ピンセット用移載システム
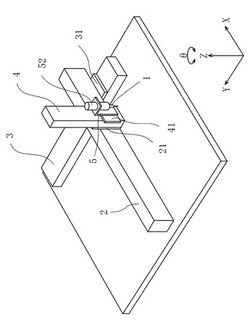
【課題】付着式ピンセットに対して好適な新規の移載システムを提供する。
【解決手段】
微細部品を付着するための粘着材、この粘着材を先端に導くための導出パイプ、この導出パイプ先端に粘着材を送り出す手段、導出パイプ先端より突出及び後退して、付着した微細部品を離脱するスライドパイプからなる付着式ピンセット1を搭載するキャリア5と、このキャリア5を水平方向に走行案内する走行レール2,3と、キャリア5を上下方向に昇降案内する昇降レール4と、キャリア5を走行及び昇降レール2,3,4に沿って駆動する手段20,30,40と、スライドパイプを前進及び後退する手段とを備えた。
(もっと読む)
ロボット装置

【課題】教示作業が容易であり、且つ実動作でのタクトタイムを短縮できるロボット装置を提供する。
【解決手段】ワークを保持するワーク保持部10を有して往復運動する第1アーム11、その第1アーム11を連結して第1アーム11と同じ方向に往復運動する第2アーム12とで少なくとも構成されたアーム部2、及び、第1アーム11の動作を第2アーム12に優先して制御して、アーム部2を始点座標P0から所定の座標位置Pまで移動させる制御装置を備えたロボット装置1により、上記課題を解決した。前記の制御装置は、ロボット座標系としてR軸を設け、始点座標P0から所定の座標位置Pまでの距離RをR=R1+R2(R1は第1アーム11の移動距離であり、R2は第2アーム12の移動距離である。)の順機構解を定義し、RからR1,R2への割付を逆機構解として定義することが好ましい。
(もっと読む)
産業用ロボットおよび組立装置
【課題】可動範囲の拡大が図れる産業用ロボットの技術を提供する。
【解決手段】産業用ロボット1は、水平多関節ロボットとして構成されており、ベース部10に第1関節J1を介して接続するアーム部11と、アーム部11に手首関節部Jhを介して接続するハンド部12とを備えている。そして、アーム部11は、第1関節J1に接続する第1アーム111と、第1アーム111に第2関節J2を介して接続する第2アーム112とを有している。ここで、第2アーム112の長さL2は、第1アームの長さL1より大きくなっている(例えば約1.5倍)。これにより、アームを第2関節J2で折り畳んだ状態で第1関節J1による水平旋回を行う場合、その最小旋回半径の最大リーチ半径に対する比率を低減でき、ロボット1の可動範囲の拡大が図れる。
(もっと読む)
ロボットハンドおよび基板搬送ロボット
【課題】 既存のロボット本体を交換することなく、基板の搬送可能領域を大きくすることができる基板搬送ロボットのロボットハンドを提供する。
【解決手段】 ロボットハンド20を伸縮状態とすることによって、ロボットアームの先端部の可動領域では、ウェハ21の搬送に必要な可動領域に達しない場合であっても、ウェハ21の搬送に必要なウェハ21の可動領域を得ることができる。これによってロボット本体を交換することなく、搬送元位置または搬送先位置の変更可能な範囲を広げることができる。またロボットハンド20を縮退状態とすることで、ロボットアームを構成するアーム部分が他の装置と干渉する可能性を減らすことができ、ロボットの移動における制約を少なくすることができる。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】構成部品の破損等の発生を防止することと、リンクヘッドの移動・回動動作として所望の移動・回動動作を得ることと、機構全体の小型化を図ることとを可能としたパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301の3自由度の回動及び移動の少なくとも一方の制御が可能なパラレルメカニズム300であって、リンクヘッド301を駆動するための4個のアクチュエータと、これら4個のアクチュエータにそれぞれ接続される4個のリンク350A,350B,351A,351Bを含み、リンクヘッド301に接続されるリンク集合体350,351とを備え、これらリンク集合体350,351とリンクヘッド301との間に介在する回転ジョイント355をリンクヘッド301に対して一軸線方向に相対移動可能に接続する直動ジョイント353とした。
(もっと読む)
マイクロマニピュレータ
【課題】装置全体を複雑にすることなく微小物体を容易かつ適切に操作することができるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1は、細胞を載置するためのXYステージ42と、細胞を操作するための第1操作ユニット3と、第2操作ユニット4とを備えている。第1操作ユニット3は、細胞を操作するハンドリング部34と、ハンドリング部34をX、Y方向に移動させるXY駆動部31と、XY駆動部31に支持され、ハンドリング部34をZ方向に移動させるZ駆動部33とを有している。第2操作ユニット4は、細胞を操作するハンドリング部44と、XYステージ42をX、Y方向に移動させるXY駆動部41と、ハンドリング部44をZ方向に移動させるZ駆動部43とを有している。第1、第2操作ユニットでハンドリング部34、44に対する操作機能が異なる。
(もっと読む)
部品装着方法
【課題】従来に比べて部品装着時間の短縮を図ることができる部品装着方法を提供する。
【解決手段】スプラインシャフト13の他端部13bにて空気通路27に接続される第1ブロー装置106にて上記空気通路内を大気圧状態に復帰させ、上記スプラインシャフトの一端部13aの近傍にて上記空気通路に接続される第2ブロー装置107にて上記空気通路内を大気圧状態に復帰させる。これにより上記空気通路内の真空圧を大気圧に復帰させるために要する時間を従来よりも短縮することができる。
(もっと読む)
関節構造の駆動機構
【課題】 部品点数の削減により構造を簡素化するとともに、慣性を小さく抑えて起動トルクを軽減させることにより、低出力駆動源の使用によってコストを削減し、さらに、放熱面積の拡大によって摩擦熱を積極的に放熱して冷却することで耐久性を向上させることができる関節構造の駆動機構を提供する。
【解決手段】 駆動源20の作動により、出力回転軸21を回転させ、これに伴なって第1アーム22を旋回させるとともに、動力伝達機構30によって第1関節軸23を逆方向に回転させ、かつ、第2アーム24を第1アーム22の逆方向に旋回させる関節構造の駆動機構において、動力伝達機構30を、第1プーリ32と、第2プーリ34およびこれら第1,第2プーリ32,34に掛け渡されるタイミングベルト38Aによって構成し、第1プーリ32は駆動源20側に固定し、かつ、中心部に出力回転軸21を回転自在に挿通してある。
(もっと読む)
要素を部品に締結するための締結工具及び方法
【課題】改善されたサイクル時間を達成することができる締結工具を提供すること。
【解決手段】要素(18)を保持するための保持装置(16)を有する、要素(18)を部品に締結するための締結工具(10)が開示され、この保持装置(16)は、保持された要素(18)を部品に締結するために、締結用駆動装置(20)によって締結工具ハウジング(12)に対して締結方向(22)に沿って移動させることができる。この工具において、締結工具ハウジング(12)(図1)の移動の際に、保持装置(16)を所定位置に保持するために、抑制手段(32)が設けられる。
(もっと読む)
搬送装置
【課題】1台の駆動源を用いてワ−クを把持したり解放したりするだけでなく、ワ−クを把持したまま上下動させられる搬送装置を提供する。
【解決手段】軸14が下限位置のときは、3つのア−ム32−1,32−2,32−3は最大限に広がっており、3つの爪34−1,34−2,34−3は、搬送装置10の真下に位置するワ−クWから離れている。この状態から軸14を上昇させることによりリンクホルダ46も上昇し、この上昇に伴って3つのリンク42−1,42−2,42−3はボルト41−1,41−2,41−3を中心軸にして矢印D方向に回動する。この回動によって3つのア−ム32−1,32−2,32−3はリンク42−1,42−2,42−3によって閉じられて、3つの爪34−1,34−2,34−3がワ−クWの外周面に接触してワ−クWは搬送装置10に把持されることとなる。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
産業用ロボット
【課題】 複雑な制御を何ら必要とせず、また、駆動軸を増やすことなく、ロボットのアーム先端のエンドエフェクタの向きを常に一定になるようにする。
【解決手段】 本発明の産業用ロボットは、最上位の位置に配置されるベース部11と、ベース部11から下方に垂設される水平多関節アーム12と、水平多関節アーム12の先端部に設けられる上下方向に移動自在な上下アーム18と、上下アーム18の下端部に連結されエンドエフェクタ22を有する手首部20と、を有し、さらにエンドエフェクタ22の向きを水平関節アーム12の回動に連動して一定の方向に保持する平行リンク機構を備えている。
(もっと読む)
産業用ロボット
【課題】 多関節アームを駆動するとき負荷を低減し、モータ容量の縮小化を図り、省エネルギの産業用ロボットを提供する。
【解決手段】 ロボットの各制御軸を駆動するモータが集中配置されるベース部11を最上位の位置に配置し、ベース部11から水平多関節アーム12を垂設し、上下方向に移動自在な上下アーム18を水平多関節アーム12の先端部に設け、上下アーム18の下端部にエンドエフェクタ22を有する手首部20を設ける。
(もっと読む)
産業用ロボット
【課題】アーム先端重量を軽量化してモータ容量の縮小化を図りかつモータや伝動機構のメンテナンス性を高めさらに部品コストの低減化を図る。
【解決手段】第1軸乃至第4軸駆動用モータからなるモータユニットを備えたベース部11と、第1軸を中心にベース部よりも下位にある水平面上を回動する第1アーム14と、第1アームの先端部で第2軸を中心に第1アームの下位にある水平面上を回動する第2アーム16とからなる水平アーム12と、ベース部と第1アームを連結する関節部に設けられる第1の減速機34と、第1アームと第2アームの関節部に設けられる第2の減速機35と、手首部20を上下方向に昇降させる第3軸たるボールねじ機構と、手首部を揺動させる第4軸たる揺動機構を具備する上下アーム18と、第1減速機と第2減速機の各々に同軸の多重中空軸ユニットとベルト伝動ユニットの組合せからなり、第2軸乃至第4軸の各軸に動力を伝動する伝動ユニットを具備する。
(もっと読む)
搬送装置
【課題】 簡易な構成で搬送物を搬送することができる搬送装置を提供する。
【解決手段】 軸方向に移動可能なロッド6a,6b,6cをそれぞれ有する複数のエアシリンダ5a,5b,5cと、複数のエアシリンダ5a,5b,5cをそれぞれ位置決め固定するとともに位置決め固定した位置を支点として遊動可能に支持するボールジョイント3a,3b,3cと、複数のエアシリンダ5a,5b,5cのロッド6a,6b,6c下端がそれぞれボールジョイントで連結された連結部材7と、この連続部材7から鉛直方向に設けられた搬送ベース12を備えて構成する。
(もっと読む)
ダブルアーム型ロボット
【課題】 ダブルアーム型ロボットの旋回半径を小さくする。
【解決手段】 関節部3,4,5により回転可能に連結されて回転駆動源による回転力を伝達し所望の動作をさせるアーム2を二組備えてなるダブルアーム型ロボット1において、アーム2を構成する上腕6と前腕7とを伸ばしきった伸長位置と上腕6と前腕7とを折り畳みハンドを引き込んだ縮み位置との間を移動するようになされ、アーム2を縮み位置に移動させたときに、当該アーム2に取り付けられたそれぞれのハンド部8がアーム2の基端の関節部3の間に位置し、かつ、二組の肘関節部4を二組ともにハンド部8の移動方向に関して同方向でかつ水平方向側方に突出させ、ハンド部8の移動方向に関して肘関節部4が突出する方向と反対側に移動機構11を配置するようにしている。
(もっと読む)
基板吸着装置と基板支持体および基板搬送装置
【課題】基板が熱膨張・熱収縮しても、基板を吸着したまま確実に追従することができる基板吸着装置を提供する。
【解決手段】中央部に設けた凹部21aと凹部21aの底部中央から外部に通じる吸気通路21bと凹部の周囲に設けたボール収納凹部21cとを有するパッド座21と、大口径円筒部22aと大口径円筒部22aに連接する小口径円筒部22bから成る弾性体のパッド支持体22と、つば23bを有する円筒部23aから成る帽子状をした、上部周囲に周縁凸部23cと中央に吸気孔23dを設けた吸引パッド23と、を有する基板吸着装置であって、ボール収納凹部21cにボール24を収納し、パッド座21の吸気通路21b上にパッド支持体22を立設し、大口径円筒部22aの上面に吸引パッド23を載置し、吸引パッド23の垂直方向および水平方向の移動を許容するパッド押さえ25を設けた。
(もっと読む)
ロボットアーム
【課題】伸長状態でのアーム剛性と位置決め精度を向上することができるロボットアームを提供する。
【解決手段】第1及び第2のアーム311,321を連動させる連動部340が、一方が第2のアーム321に固定された等長の第1の連動リンク341,342と、これらに連結された等長の第2の連動リンク343,344とを有する交差リンク機構と、一方が第2の連動リンク343,344の片方に固定された等長の第3の連動リンク343,344と、一方が第1のアーム311に固定され他方が第1の連動リンク341,342のうち他方に固定された等長の第4の連動リンク347,348とを有する交差リンク機構とからなり、一方の第1の連動リンク341と一方の第4の連動リンク347とのいずれかは、第1又は第2のアーム311又は321に対し該アームの軸線から外れるよう傾けて固定されている。
(もっと読む)
搬送ロボットおよびその搬送方法
【課題】停止位置精度の不正確さと搬送アームの動作遅れを低減し、高速基板搬送を可能にした搬送ロボットとその搬送方法を提供する。
【解決手段】略中央部に第1の駆動軸14が設けられ、第1の駆動軸を回動中心にして、水平面内で回動可能に支持された第1のアーム11と、第1のアームの略両端部に第2および第3の駆動軸9a,9bが設けられ、第2および第3の駆動軸を回動中心にして、水平面内で回動可能に支持された第2および第3のアーム6a,6bと、第2および第3のアームの略先端部を回動中心にして、水平面内で回動可能に支持されたワーク支持部3a,3bとが備えられ、第2および第3の駆動軸を回動させる第2および第3の駆動源15a,15bは、第2の駆動軸9aと第1の駆動軸14との間および第3の駆動軸9bと第1の駆動軸14との間に各々設けられている
(もっと読む)
搬送システム
【課題】より簡易に被搬送物を搬送できる搬送システムを提供する。
【解決手段】搬送システムは、搬送路に沿って配置された複数の搬送ロボット14を備える。各搬送ロボット14は、被搬送物12に吸着して保持する吸着カップ38を有している。各搬送ロボット14は、吸着カップ38で被搬送物を保持した状態でロボットアームを駆動し、被搬送物12を下流側に搬送する。そして、下流側に位置する他の搬送ロボット14に被搬送物12を渡す。これを順次繰り返すことにより、被搬送物12を下流方向に搬送する。
(もっと読む)
101 - 120 / 127
[ Back to top ]