
Fターム[3C007ET08]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 直線摺動型 (302)
Fターム[3C007ET08]の下位に属するFターム
サイドクランプ (24)
Fターム[3C007ET08]に分類される特許
101 - 120 / 278
長ストロークロボットハンド
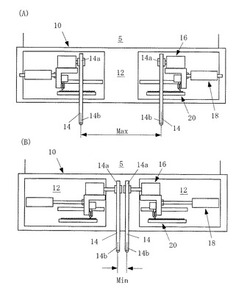
【課題】ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができ、かつ挿入位置及び把持位置にかかわらず大きな把持力を有し、かつ小型軽量化が可能である長ストロークロボットハンドを提供する。
【解決手段】搬送ロボットのハンド取付部5に取り付けられたハンド本体12と、ハンド本体に上端部が水平方向に開閉可能に取り付けられ下方に延びる1対の把持爪14と、各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータ18と、各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置20とを備える。
(もっと読む)
プラグ載せ換えハンド装置

【課題】プラグサイズごとに、プラグをパレット上に縦にして稠密に配列するプラグ載せ換え作業が効率的に行えるプラグ載せ換えハンド装置を提供する。
【解決手段】プラグ載せ換えハンド装置において、一側にクランプ爪を有する上下に長い複数のクランプ(2)と、各クランプ(2)の他側が連結されかつ軸(5)の周りに旋回自在に支持された旋回円盤(3)と、旋回円盤(3)を軸(5)中心周りに旋回させる旋回駆動手段(4)と、軸(5)を固定したケーシング(10)と、を具備し、複数のクランプ(2)が、旋回円盤(3)の軸(5)中心に対して同じ移動量だけ水平移動する直動機構によって開閉する構成とされ、かつ複数のクランプを保持するケーシングがハンドスライドを介してロボットアームに半径方向に水平移動可能に取り付けられている。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
プラグ長手方向二点把持ハンド装置
【課題】ロボットと組み合わせたハンド装置によりプラグを着脱する際、プラグサイズによらず、プラグの軸心を回転中心に一致させてプラグを把持するプラグ平行把持が可能なハンド装置を提供する。
【解決手段】プラグ1の根元部を把持する複数の主クランプ2と、プラグの胴部を把持する複数の副クランプ13と、両クランプ2、13を開閉可能に保持するケーシング15と、ケーシングに一側が直結されかつプラグ回転モータ9に他側が連結された回転軸5と、回転軸を軸受けで支持するとともにプラグ回転モータを搭載したハンドフレーム10と、を有し、ハンドフレームが、ハンドスライド11を介して前進・後退可能にロボットアーム31に取り付けられているプラグ長手方向二点把持ハンド装置。
(もっと読む)
ワーク把持装置
【課題】把持力の調節が容易なワーク把持装置を提供すること。
【解決手段】ワーク把持装置は、第1ねじ部3aと、第1ねじ部3aに対して逆向きのねじ山を有する第2ねじ部3bとが形成されたボールねじ軸3と、ボールねじ軸3を回転駆動する電動モータ4と、ワークWを挟んで把持する第1把持手段5a及び第2把持手段5bと、第1把持手段5aを直線移動させるために第1ねじ部3aに螺合している第1移動体6aと、第2把持手段5bを直線移動させるために第2ねじ部3bに螺合している第2移動体6bと、第2把持手段5bを第2移動体6bに対して直線移動させるために第2移動体6bと第2把持手段5bとの間に配設された流体圧シリンダ装置8と、を具備する。
(もっと読む)
柱状体の搬送用チャック
【課題】柱状体、特にハニカム成形体の搬送用チャックを提供する。
【解決手段】柱状体をしたワーク(1)のクランプとアンクランプを行う搬送用チャックであって、該搬送用チャックは、駆動ユニット(12)と、該駆動ユニット(12)により接近、又は、離間する2つのアーム(11、11’)と、該アーム(11、11’)に、それぞれ回動自在に取り付けられたV字型形状をした2つのチャック爪(10、10’)を具備し、前記チャック爪(10、10’)は、弾性部材(19)により前記アーム(11、11’)に対して所定回動位置に復帰できるように付勢されていることを特徴とする。
(もっと読む)
電動ピンセット
【課題】 電動でピンセットの把持部を閉成状態で回転させると共に、該回転量及び開閉量を調整可能なこと。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成した後、スイッチ33を動作すると、モータ31を第1方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20の結合部22c及び端部21a,22aを回転させるものである。
(もっと読む)
電動グリッパ
【課題】 電動グリッパにおいて、軽量化を図り、部品点数を削減するとともに装置の構造を簡素化する。
【解決手段】 筺体12に固定されたステッピングモータ2の出力軸2aに円盤カム3が軸着され、筺体12と円盤カム3との間にねじりコイルばね6A,6Bが介装されている。円盤カム3の螺旋状に形成されたカム溝26A,26Bには、移動子33,33のベアリング36,36が係入され、移動子33,33はリニアガイド5によって直線的に移動するように支持されている。移動子33,33には、互いに閉じたときまたは互いに開いたときにワークを把持する把持部材4A,4Bが設けられている。
(もっと読む)
ワーク搬送方法およびワーク搬送装置
【課題】設備コストを抑制し、かつ、ハンドと固定治具との間におけるワークの双方向の受け渡しを確実に実施することが可能であるワーク搬送方法およびワーク搬送装置を提供する。
【解決手段】固定治具110に配置され、ワーク10に配置される開口部に挿入自在であるロケートピン120、固定治具110に対して近接離間自在に配置されるワーク搬送用のハンド130、ハンド130に配置され、ワーク10の開口部に挿入自在であり、固定治具110のロケートピン120と同心となるよう位置決めされる伸縮自在のロケートピン140、および、ハンド130のロケートピン140が開口部に挿入されたワーク10を、ワーク10が引き渡される固定治具110に向かって押し出すノックアウト機構150を有する。
(もっと読む)
成形装置および搬送装置
【課題】多様な形状の成形素材の正確な位置決めおよび搬送時間の短縮を実現する。
【解決手段】光学素子材料20を吸着保持する吸着パッド13と、光学素子材料20を把持して位置決めするチャック3を共通の吸着筒1に共通に固定し、吸着筒上下シリンダ12および吸着筒上下スライドステージ6によって同時に昇降させ、吸着パッド13は吸着パッド上下機構13aによって独立に吸着高さ位置を制御可能にし、光学素子位置決め台8に載置された光学素子材料20の外周部を一対のチャック3の間に把持して位置決めした後、吸着パッド13のみを降下させて光学素子材料20の上面を吸着保持させ、吸着パッド13およびチャック3によって位置決めされて保持された状態の光学素子材料20を、脱落させることなく、高速かつ正確に成形下型11に載置する。
(もっと読む)
ワーク設置装置と設置方法及び持ち上げ方法
【課題】専用の位置出し装置を用いずに、ワークと被設置部材の自動設置を行うことができ、搬送装置側に過剰な力を免れる機構が不要であり把持機構を小型・軽量化でき、かつ特別な制御アルゴリズムが不要であり制御負荷を小さくできるワーク設置装置と設置方法及び持ち上げ方法を提供する。
【解決手段】3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に鍔部を開放可能に把持可能な複数のツメ部材12と、複数のツメ部材を互いに連動して水平反対方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12は、ワーク1の鍔部1bの水平な下面1cを支持する水平な支持面12aと、鍔部1bの外面又は上縁部を把持する把持面12b,12cとを有する。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
ロボットの安全監視装置
【課題】安全に作動させることができるロボットの安全監視装置の提供。
【解決手段】作動コントローラー2は、関節アームに含まれる各々のリンクおよび狭持片の目標位置を算出し、算出した目標位置に基づき、サーボモーター53a〜53f,54f,54gの作動を制御する。領域判定部10は、各狭持片ごとに、複数のリンクと狭持片が直列に接続された一対のリンク列を設定する。領域判定部10は、リンクおよび狭持片の現在位置に基づいて、リンク列ごとに関節アームの現在位置を算出し、算出したリンク列ごとの関節アームの現在位置が安全作動領域内にあるか否かを判定する。安全停止部11は、いずれかのリンク列について、関節アームの現在位置が安全作動領域外にあると判定された場合に、サーボモーター53a〜53f,54f,54gの作動を停止させる。
(もっと読む)
ロボットハンド
【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
ロボットハンド装置およびそのようなロボットハンド装置のアーム調節方法
【課題】複数種類のワークに対して柔軟な対応を行うことができる安価なロボットハンド装置を提供する。
【解決手段】ワークをハンドリングするロボットハンド装置20は、ロボット1に取付けられるハンドベース21と、ワークを把持する把持部をそれぞれが備えている少なくとも二つのアーム30a〜30cと、アームに取付けられていてアームをハンドベースに磁力で結合する磁力発生部39とを具備する。さらに、少なくとも二つのアームのうちの一つのアームを一時的に保持するアーム保持機構部50を具備してもよい。
(もっと読む)
ロボットハンド
【課題】異なるワーク間でも製品形状を利用することでワーク把持部を共用化することができるロボットハンドを提供する。
【解決手段】シリンダブロックを把持するロボットハンドであって、所定の係合部材を設けた第一把持プレート部及び第二把持プレート部を具備し、前記各係合部材は、異なる形状を有する複数のシリンダブロック間において各シリンダブロックの被把持部の共通した位置にある係合可能部分を利用して係合する共通係合部材と、異なる形状を有する複数のシリンダブロック間において各シリンダブロックの被把持部の各シリンダブロック固有の位置にある係合可能部分を利用して係合するとともに、各シリンダブロックを把持した際に、当該シリンダブロックの被把持部と当該シリンダブロックと異なる形状を有するシリンダブロックの係合可能部分に係合するために用いられる係合部材とが干渉しないように設けられた専用係合部材と、からなる。
(もっと読む)
電子部品取り付け用グリッパー装置
【課題】本発明は、構造が簡単で、高精度位置移動が必要なところで、容易く高精度位置移動を具現することができる電子部品取り付け用グリッパー装置に関する。
【解決手段】本発明による電子部品取り付け用グリッパー装置は、微細部品の中心に向かって水平移動する支持部と、前記支持部と共に移動し、微細部品を把持するフィンガーを備えるグリッパーと、前記フィンガーが前記微細部品の中心に向かって距離が狭くなるように張力を提供する弾性手段と、前記グリッパーが水平方向に移動するようにガイドするガイド手段と、垂直往復移動して前記支持部を水平方向に往復移動させることで、前記グリッパーを開閉させるカム部と、を含む。
(もっと読む)
ウェブハンドリング装置および方法
【課題】平置きもしくは平積みされたウェブを、把持して位置ずれなく搬送し、水平に置かれた母材の所定位置に、垂直もしくは垂直に近い角度で正確に位置決めすることができ、かつウェブの溶接縁と母材の隙間を皆無又は均一に位置決めできるウェブハンドリング装置および方法を提供する。
【解決手段】3次元的に数値制御されたNC移動台9に固定された本体12と、本体に取り付けられ水平軸15を中心に旋回可能な旋回装置14と、旋回装置に固定され水平に位置するウェブ1を下方から支持する支持面17を有するフォーク部材16と、旋回装置に固定されウェブを上方から把持する把持面19を有する把持部材18とを備える。ウェブ1の水平な主要部の下面をフォーク部材16で支持し、把持部材18を上方から閉じて把持し、その状態で3次元的に搬送し、水平軸15を中心にウェブ1の溶接縁1aを下向きに旋回し、水平に置かれた母材の上面に、垂直もしくは垂直に近い角度で位置決めする。
(もっと読む)
ロボット装置
【課題】ロボット装置において、装置構成の複雑化、大型化、重量増加を招来することなく、さまざまな形状の作業対象物について把持等の作業を行うことができるようにし、また、作業対象となるワークを把持したときの荷重方向について把持爪を支える力を十分に確保し、重いワークを把持することができるようにする。
【解決手段】把持爪6が着脱可能となっている把持機構5を有するマニピュレータ1を備えたロボット装置であって、把持手段5は、2本以上の把持爪6が装着され、装着された各把持爪6を相対的に接離させる方向に移動操作することにより、各把持爪6により、作業対象となるワーク201を把持し、または、解放する機能を有し、各把持爪6が把持機構5に対してワーク201を把持するための移動方向に移動されたときに、各把持爪6に係合してワーク201を把持したときのワーク201による荷重を支持する保持部材7を備えた。
(もっと読む)
電動ハンド
【課題】大型化を避けつつ、一対の把持部材の閉じ方向および開き方向のいずれの移動でも把持対象物を把持でき、且つ、停電時にも把持力を失うことがない電動ハンドを提供する。
【解決手段】サーボモータ1と回転軸2とが並列配置となっているので、全体として長尺とならず、小型に構成できる。回転軸2の右ねじ18と左ねじ19にボールナットからなる直動部材3,4を螺合し、回転軸2によって直動部材3,4が互いに反対方向に移動するようになる。そして、直動部材3,4の互いに接近する方向の移動を、第1の連結部材28,29または第2の連結部材によってスライダ24,26の接近する方向の移動または互いに離反する方向の移動に変換し、スライダ24,25に取り付けられる把持部材の閉じ方向の移動および開き方向の移動によって把持対象物を把持する。
(もっと読む)
101 - 120 / 278
[ Back to top ]