
Fターム[3C007ET08]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 直線摺動型 (302)
Fターム[3C007ET08]の下位に属するFターム
サイドクランプ (24)
Fターム[3C007ET08]に分類される特許
121 - 140 / 278
物品保持装置
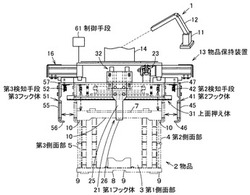
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
電動ハンド

【課題】長方形や楕円形などの長短の長さのあるワークを正確に位置決め(センタリン
グ)できる電動ハンドを提供する。
【解決手段】カム部材として第1及び第2の2個のカム部材11B・12Bが同じ軸線上で重ねて軸支され、これら第1及び第2のカム部材のそれぞれにおいて一対のカム溝14・16が点対称に形成され、しかも第1及び第2のカム部材のカム溝14・16相互は、軸心からの距離が互いに異なっている。第1及び第2のカム部材の直径が異なり、大径の第2のカム部材12Bのカム溝16が、小径の第1のカム部材11Bの外周縁を越えるところに形成されている。
(もっと読む)
タイヤ把持装置
【課題】把持位置がタイヤ中心に案内されるタイヤ把持装置を提供する。
【解決手段】ロボットアーム先端11aの中心位置合せされた固定の第1ベース部材12に、タイヤの回転中心軸O1に略垂直な方向に移動可能な第2ベース部材13を支持し、第2ベース部材13にタイヤの回転中心軸方向に移動可能な複数のアーム部材14を設け、タイヤ外周面に圧接してタイヤを把持する位置とタイヤ外周面から離間する位置へ複数のアーム部材14を移動する第1駆動手段15と、複数のアーム部材をタイヤの外周面と対向する位置へタイヤの回転中心軸方向に移動させる第2駆動手段16と、アーム部材によって把持されたタイヤの回転中心軸線O1上に第1ベース部材の中心O2位置を合わせる位置調整手段20を有し、第1位置に配置されたタイヤの位置に追従してアーム部材がタイヤを把持した後に、位置調整手段でタイヤの回転中心軸線上に第1ベース部材の中心を位置させる。
(もっと読む)
取り寄せ具
【課題】遠方の物品を俊敏にキャッチし取り寄せる、長尺になる取り寄せ具を提供する。
【解決手段】ハンド保持具1にレール収納体3が設けられ、該レール収納体3にはこれから前方に繰り出される伸縮レール4が設けられ、該伸縮レール4に、とってこいスライダー5が設けられ、該とってこいスライダー5に吊下連結材6を介してキャッチ7が設けられている。また後方のスライダーにはスプーン形状のキャッチが設けられている。さらに先端具42付近に、先端つまみ具片44が設けられ、キャッチした物品を手元に移動しうる構成とする。
(もっと読む)
把持装置
【課題】基板上に実装されるワークを把持する把持装置において、接合に熱を必要とする接合部材を用いる場合の、基板とワークとの加熱による接合を可能とする。
【解決手段】ワーク30を把持する把持部材20a、20bに、供給された光のエネルギーを熱エネルギーに変換する光熱変換部25a、25bを設け、把持部材に供給された光のエネルギーを熱エネルギーに変換することで、接合に必要な熱を接合部材43a、43bへ与える。
(もっと読む)
ハンド機構
【課題】本発明は、被把持面が曲面状の物品を把持するハンド機構であって、様々な大きさの被把持面に対応しつつ安定して物品を把持可能なハンド機構を提供することを目的としている。
【解決手段】本発明は、物品を把持するハンド機構であって、直接的又は間接的に物品に接触する一面を有する弾性部材からなる変形部と、前記一面と相対する前記変形部の他面の中心線に接する状態で配置された剛性の高い支持部と、前記支持部が固定された固定部と、前記固定部を物品の方向へ移動させ所定の力で前記変形部を物品へ押圧し変形せしめることにより物品を把持するハンド機構である。
(もっと読む)
チャック装置
【課題】一の駆動源により複数のヘッドを移動(スライドあるいは搖動)させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能なチャック装置を提供する。
【解決手段】第1のヘッド21および第2のヘッド22は、ベースに対してそれぞれスライド自在に取り付けられている。第1のヘッド21には、第1のプーリ214が取り付けられ、第2のヘッド22には、第2のプーリ224が取り付けられている。ワイヤ61は、一端がワイヤ止め金具71によりベースに固定され、第1のプーリ214および第2のプーリ224を経由して張設されている。モータからの回転駆動力は、ワイヤ61を介して第1のプーリ214および第2のプーリ224へと伝達され、第1のヘッド21および第2のヘッド22がワイヤ61の変位に応じてスライドする。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
エアチャック装置
【課題】内部に侵入した電解加工機の電解液等が結晶化して堆積してしまうことを抑制可能なエアチャック装置を提供する。
【解決手段】ハウジング10は、内部に可動部30および伝達部41、42を収容している。可動部30は圧縮空気の作用により往復に摺動し、摺動方向の駆動力は伝達部41、42によって所定方向の駆動力として把持部51、52に伝達される。把持部51、52はこの駆動力によって互いに近づく、または遠ざかるように移動し、間に対象物を把持する。ハウジング10は、外部から伝達部収容空間120へ霧状の水を供給可能な給水ポート20を備える。これにより、給水ポート20から供給する霧状の水によって内部への電解液の侵入を抑制し、電解液の結晶を溶解することができるので、電解液等が結晶化して内部に堆積してしまうことを抑制することができる。
(もっと読む)
ロボットハンドとこれを用いたワーク位置決め方法
【課題】ワーク位置決め装置及び高精度の画像認識装置を用いることなく、サイドガイド、ロケートピン等と干渉することなくワークを把持することができ、ワーク搬送中にワークがずれても、ワーク開放時にワークを正確に位置決めすることができ、隣接するワークに干渉することなくワークを正確に並べることができるロボットハンドとこれを用いたワーク位置決め方法を提供する。
【解決手段】ワーク1を把持して搬送し所定位置に移載するためのロボットハンド10。ロボットのハンド取付部9に取り付けられたハンド本体12と、ハンド本体に取り付けられワークを着脱可能に把持する把持装置14と、ワークの位置決め方向にワークより広い間隔で対向して位置する1対の距離センサ16とを備える。把持装置14でワーク1を把持し、搬送しながら距離センサ16でワーク側面までの相対位置を測定してアライメント誤差Δを求め、アライメント誤差に基づきハンド取付部9の位置を補正してワーク1を開放する。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
サンルーフユニット把持装置およびサンルーフユニット把持方法
【課題】汎用性の高いサンルーフユニット把持装置を提供すること。
【解決手段】搬送ハンド10は、略U字形状のメインフレーム31と、このメインフレーム31のうち互いに略平行に延びる部分同士を連結するセンターフレーム33と、を有するサンルーフ部材3を把持する。搬送ハンド10は、センターフレーム33の下面が着座するセンターフレーム着座部132と、メインフレーム31のうちセンターフレーム33に略平行な部分の下面が着座するメインフレーム着座部125と、メインフレーム31のうち互いに略平行に延びる部分を、内側の側面から押圧する一対の押圧部62A、62Bと、を備える。
(もっと読む)
平行開閉チャック
【課題】フィンガーがスライド部材と爪とからなる平行開閉チャックにおいて、スライド部材に対し爪の取付け再現性が高いチャック構造の提供を課題とする。
【解決手段】2個のフィンガー13a,13bを水平方向で背反往復駆動する平行開閉チャック11であり、フィンガーはスライド部材17a,17bとこれにねじ止めされる爪14a,14bとからなる。スライド部材17a,17bはねじ用貫通孔41とスリット39を有する。スリット39は上端が閉じ下方が開放されている。爪14a,14bはねじ孔43と前記スリット39の間隔にほぼ等しい幅の突部40を側方へ突出させて有する。スライド部材17a,17bのスリット39に下方の開放箇所から爪14a,14bの突部40を係合させてねじ止めすることによりスライド部材17a,17bに爪14a,14bを固定してある。
(もっと読む)
把持装置
【課題】簡単な機構で、把持部を高速で駆動し、かつ大きな把持力を得ることができる、把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータによって回転駆動される第1の動力伝達機構と、第1の動力伝達機構によって駆動される第1の指と、第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機によって回転駆動される第2の動力伝達機構と、第2の動力伝達機構によって駆動される台車とを備え、第1の回転アクチュエータと第1の動力伝達機構と第1の指のうち少なくとも1つを、台車に載置し、第2の回転アクチュエータと減速機と第2の動力伝達機構と台車とを、台座に載置し、第1の回転アクチュエータを作動させて、第1の指を高速で駆動し、第2の回転アクチュエータを作動させて、第1の指を把持対象物に強い力で押し付け、第1の指と第2の指とによって物体を把持する。
(もっと読む)
ロボットハンドとこれを用いた対象物の把持方法
【課題】把持部の交換をすることなく、複数種類の対象物を把持でき、対象物の上方に障害物が存在しても、対象物へのアクセスを容易に行えを提供する。
【解決手段】取出位置にある対象物を挟持して別の位置まで搬送する搬送ロボットのロボットハンドであって、種類が異なる第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5、7は、開閉駆動される共通のフレーム9に設けられる。第1の挟持部5は、フレーム9の閉動作により第1の対象物2を挟むように動作し、第2の挟持部7も、フレーム9の閉動作により第2の対象物3を挟むように動作する。
(もっと読む)
ロボットハンド
【課題】1つのアクチュエータを作動させることで複数の対象物を同時に挟持できるロボットハンドを提供する。
【解決手段】第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5,7は、開閉駆動される共通のフレーム9に設けられる。第1および第2の挟持部5、7は、フレーム9の閉動作によりそれぞれ第1および第2の対象物2,3を挟むように動作する。第2の挟持部7は、第2の対象物3を弾性力で挟持する弾性力付与機構11を有し、第1の挟持部5が第1の対象物2を挟持している状態において、第2の対象物3と第2の挟持部7との間で前記弾性力が作用するようになっている。
(もっと読む)
物品保持装置
【課題】紐状取手を有する取手付きの物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置10は、互いに接近および離反可能であり、接近時に物品本体A1を両側方から挟持する一対の挟持体12を備える。各挟持体12の下部には、物品本体A1の下方に対して進退可能であり、進出時に物品本体A1の下面を支持する下面支持体13を設ける。挟持体12は、物品本体A1の側面のうち紐状取手A2がない部分に当接する挟持部31と、紐状取手A2に当接してこの紐状取手A2を物品本体A1の側面に略沿った状態に撓ませる取手当接部とを有する。
(もっと読む)
残留変形性薄物把持装置
【課題】本発明の課題は、布地等が床面等に平らな状態で存在する場合において、布地等にダメージや、汚れ、折り目を残すことなく、高確率で自動的にその布地等を把持することができ、且つ、製造コストをできるだけ低く抑えることができる把持装置を提供することにある。
【解決手段】本発明に係る把持装置1,2は、ハンド部21を第1距離離間させ、下側のフィンガ部21bが布地CL等の縁部に接触する位置(第1位置)まで把持機構2Aを移動させる。次いで、同装置は、ハンド部を第2距離まで接近させる。続いて、同装置は、把持機構を第1位置よりも上後方の位置(第2位置)に移動させ、ハンド部を第3距離まで接近させる。その後、同装置は、フィンガ部21Aが第11距離離間された状態で把持機構を少なくとも第2位置よりも前方の位置に移動させる。そして、同装置は、フィンガ部を第12距離まで接近させる。
(もっと読む)
ロボット、ロボットハンドおよびアタッチメント
【課題】 対象物の把持のための微妙な握力調整や位置決め精度を緩和したロボットハンドおよびアタッチメントを提供する。
【解決手段】 互いに接近および離間することによって開閉する一対の把持フィンガー7を備えており、ロボットハンド部6が保持しようとする対象物には、把持フィンガー7が把持するためのアタッチメント41が取り付けられており、前記一対の把持フィンガー7同士の対向する面7aそれぞれに対向する複数個の係止部材14が突設され、前記アタッチメント41の左右の両外表面それぞれに前記係止部材14が係止する複数個の被係止部41aが形成されている。
(もっと読む)
チャック機構およびそのチャック機構を用いたワーク搬送装置
【課題】径が異なる円筒形状のワークをチャックする際のチャック中心位置がずれないように、チャック位置を調整するようにした、チャック機構およびそのチャック機構を用いたワーク搬送装置を提供する。
【解決手段】開閉可能に構成した第1、第2アーム(11a、11b)により円筒形状のワーク(W)をチャックするものである。
第1、第2アーム(11a、11b)は、それぞれ、ワーク(W)の外周との接触箇所を、ワーク(W)の外周と二箇所で接触する接触面とした第1、第2爪部(13、14)を有し、これら第1、第2爪部(13、14)のうち、いずれか一方の爪部を、第1、第2アーム(11a、11b)の開閉方向に直交する方向に往復動可能な構成とする。
(もっと読む)
121 - 140 / 278
[ Back to top ]