
Fターム[3C007ET08]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 直線摺動型 (302)
Fターム[3C007ET08]の下位に属するFターム
サイドクランプ (24)
Fターム[3C007ET08]に分類される特許
81 - 100 / 278
光学式位置検出装置、ハンド装置およびタッチパネル
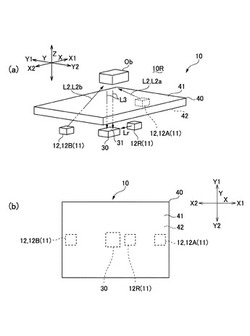
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
駆動装置

【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
コンロッドのクランプ装置
【課題】コンロッドを加工装置で機械加工する際に、様々な車種に対応するために形状や大きさの異なるコンロッドであっても簡易な構成でクランプすることができる、コンロッドのクランプ装置を提供する。
【解決手段】本実施形態に係るクランプ装置10は、取付け部20に固定された状態で前方に延出する棒状の支持部31と、該支持部31に連結された状態で同じく前方に延出する棒状の可動部51とを備え、支持部31及び可動部51に、位置決め機構、大端部クランプ機構、小端部クランプ機構、第一の駆動機構等の各機構が配設される。
(もっと読む)
電動ハンド
【課題】電気を駆動源とした電動ハンドにおいて、小型で消費電力が少なく、使い勝手の良い電動ハンドを提供することを目的とする。
【解決手段】電磁ソレノイドを用いたハンドの駆動部と、一対のマスタージョウが開閉動作を行う把持部と、ソレノイドの動作を把持部の開閉動作に変換する変換部を備えたソレノイドハンドにおいて、電磁ソレノイドは磁石を内蔵してプランジャーを吸引保持するラッチ式ソレノイドを構成し、プランジャーの位置はソレノイドが吸引保持した時に把持部が開き位置になるように配置し、把持部の閉じ位置から開き位置までをソレノイドの吸引力で駆動して吸引保持し、開き位置から閉じ位置まではスプリング機構部のスプリング力で駆動し、ソレノイドの吸引力及び吸引保持力をスプリング力よりも大きく設定したソレノイドハンドを構成する。
(もっと読む)
ピッキング方法およびハンド装置
【課題】箱体内の対象を、どのような形状であっても、またどのような姿勢であっても、ハンドによって確実にピッキングする。
【解決手段】ハンドによって4つのコーナーを有する箱体B内の対象Tをピッキングするピッキング方法において、ハンドは、略同一方向に延びて該同一方向と略直交する平面方向に相対的に移動する4本の把持爪12a〜12dを備えている。まず、ハンドの把持爪12a〜12dそれぞれを開口を通じて箱体B内に進入させて、コーナーC1〜C4それぞれに配置する。その後、把持爪12a〜12dそれぞれを互いに接近するように前記平面方向に相対的に移動させて対象Tに接触させることにより、4本の把持爪12a〜12dによって対象Tを把持する。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長形状のガイド部の先端に設けられた把持具の姿勢を遠隔操作で変更することができ、その遠隔操作機構は比較的簡単な構成であり、かつガイド部の形状を問わない遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に設けられた開閉式の把持具1と、先端部材2に回転自在に設けられた回転部材13と、回転部材13の回転動作を把持具1の開閉動作に変換する回転・開閉変換機構14とを備える。ガイド部3は、回転部材13に回転を伝達する回転軸22と、両端に貫通したガイド孔30aとを内部に有する。先端が先端部材2に接して進退動作することにより先端部材2を姿勢変更させる姿勢操作部材31をガイド孔30a内に進退自在に挿通する。
(もっと読む)
ハンドおよびマニプレータ装置
【課題】ワークの大きさが変化しても把持力を一定にでき、かつ、小型化を実現できるハンドを提供すること。
【解決手段】ハンド5は、アーム6の先端に設けられて異なる大きさのワークを把持する。このハンド5は、アーム6の先端に固定された固定部20と、この固定部20に接近または離間可能な可動部30と、を備える。固定部20は、所定方向に延出する2本の第1フィンガ22A、22Bを有し、可動部30の他方は、第1フィンガ22A、22Bに略平行に延出する3本の第2フィンガ32A〜32Cを有する。可動部30は、第2フィンガ32A〜32Cが第1フィンガ22A、22Bに対して略平行である状態を維持しつつ、この固定部20に対して接近または離間する。
(もっと読む)
搬送ハンド及び搬送ロボット
【課題】画像認識によるZ軸方向の位置情報に誤差がある場合であっても、搬送ハンド及び物品の損傷を防止するだけでなく、確実に物品を挟持することができ、搬送中に物品の姿勢を崩すことなく安全に搬送できる搬送ハンドを提供する。
【解決手段】画像認識によって得られた物品の3次元位置情報に基づいてその物品Wを搬送する搬送ロボット400に用いられ、ハンド本体4に設けられた複数の挟持体5の間隔を拡縮することによって物品Wを挟持又は解放する搬送ハンド3であって、挟持体5が収容部51と可動部52とからなり伸縮可能に構成され、物品Wを挟持した状態において、可動部52が、がたつきにより収容部51に対して傾いて収容部51の挟持方向の内面51aと接触する。一方、物品Wを開放した状態において、可動部52が、付勢部材53の弾性力により、収容部51の挟持方向の内面51aから離間する。
(もっと読む)
把持装置
【課題】変形し易く強度が弱い段ボール箱のようなワークの変形を最小、確実に保持し、ワーク寸法に応じて確実にワークを把持することのできる把持装置を提供。
【解決手段】把持装置1は、ロボットのアーム先端22に取り付けられた水平角枠2と、短辺側から垂下し把持平面4を有する固定把持部3と、他方側に移動部5と、移動部から垂下する把持平面7を有する移動把持部6と、移動部に設けられた検出移動部9と、検出移動部を付勢するスプリング12と、検出移動部から垂下する接触平面11を有する検出板10と、検出板の接触平面と把持部の把持平面との差が所定量以下になった時に信号を出力する検出器13と、を設け、さらに、移動及び固定把持部の下部に互いに相手側方向に延出する爪3e,6eを設けた。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換すると共に復帰ばね機能を持つ方向変換部材と、を具備した構成になっているので、駆動力の直角方向への変換ができるだけでなく、方向変換部材が復帰ばね機能を備えているので、別途復帰用のばね部品を設ける必要はなく、それによって、グリッパの小型化を図ることができる。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
アクチュエータ及び把持装置
【課題】構造が簡単で製造コストが安価であり、狭い場所にも適用可能な把持装置を提供すること。
【解決手段】1対の把持指の各々について、少なくとも端部が重なるように配置し連結された2枚以上の金属薄板1と、この連結側端部6の反対側端部において金属薄板を金属薄板の長さ方向に対して垂直に往復動させ、把持指の連結側端部を、応力作用により揺動動作させる手段を設けること特徴とする。この揺動動作により、把持対象物を抱き込み、確実に把持できる。
(もっと読む)
ワーク把持装置およびワーク移送装置
【課題】直列に整列した複数の柱状のワークを確実に一括把持することが可能なワーク把持装置を提供する。
【解決手段】このワーク把持装置1は、一対のチャック10と、これらのチャック10の対向部位に互いに対面するように設けられる一対の板ばね部材20とを備えている。板ばね部材20は、チャック10に取付けられる取付け部21と、この取付け部21からそれぞれ延びて、ワーク101に接触することで互いに独立して側方へ撓み変形する複数のばね片22とを有する櫛歯状に形成されている。チャック10は、各ばね片22の先端部22aに接触して当該先端部22aの側方への変位を規制する突出部12と、各ばね片22の基部22bの側方への変位を許容する凹部11とを有している。複数のばね片22は、ワーク101の長さ方向に、各ワーク101にそれぞれ少なくとも1つのばね片22が接触するようなピッチdで設けられている。
(もっと読む)
部材把持装置、及び部材搬送装置
【課題】コンパクトな部材把持装置を提供する。
【解決手段】環状ベース40の周方向に複数の噛合チェーン式伸縮装置42を配置する。噛合チェーン式伸縮装置48は、一対の噛合チェーン58を備え、周方向から径方向への偏向駆動直後に相互に噛合って一体に自立状態で環状板44の中心軸に向かって移動すると共に、環状板44の径方向から周方向へ偏向駆動時に相互に噛み外れて分岐する。噛合チェーン58の端部には環状部材82に接触するパッド74を設ける。各噛合チェーン式伸縮装置42は、動力伝達チェーン78の回転により同期駆動され、全ての噛合チェーン58が環状ベース40の同一径方向に移動する。動力伝達系にリンクを用いていないので高い把持精度が得られる。分岐した噛合チェーン58は周方向に配置されたチェーン収納部70に収納されるので、径が大きくならずコンパクトにできる。
(もっと読む)
アルミインゴット掴み手首本体
【課題】アルミインゴットのスタッキング装置に使用されているインゴット積み上げ装置は掴み部の爪のリンク式機構により、インゴットを的確に掴むことに欠けていた。更に積み上げの際、0度・90度のみの2方向回転により積み上げ形状にズレが生じることがあった。
【解決手段】積み上げ装置の掴み部の爪をシリンダー2による水平開閉方式にし、スムーズで正確な掴み動作が可能。また、0度・90度・180度・270度の4方向回転方式により井桁状にインゴットをズレ無く積み上げることが出来る。
(もっと読む)
クランプ装置
【課題】本発明は、構造が簡単で、使用及びメンテナンスが便利であるクランプ装置を提供することを目的とする。
【解決手段】本発明に係るクランプ装置は、部品をクランプすることに用いられ、回転軸を含むモーターと、前記モーターの回転軸に設置される駆動ギヤと、前記モーターに対称的に設置され、前記駆動ギヤに噛合される被駆動ギヤと、前記被駆動ギヤに固定され且つ前記被駆動ギヤの回転によって回転されるスクリューと、スクリューと螺合するネジ孔が設けられているスライダーと、前記スライダーに固定されるクランプアームをそれぞれ含む2つのクランプ体と、を備え、前記モーターが駆動ギヤを回転させ、前記駆動ギヤが2つの前記被駆動ギヤ及びスクリューを回転させることによって、2つの前記スライダーが前記スクリューの軸方向に沿って近接又は分離するようにスライドして、2つの前記クランプアームの間に部品がクランプされるか、2つの前記クランプアームの間から部品が脱離される。
(もっと読む)
搬送ハンド装置
【課題】板材の搬送において、当該板材との干渉を抑制し、所定位置に正確に板材を配設することのできる搬送ハンド装置を提供すること。
【解決手段】搬送ハンド50が、板材82をマグネット部54の電磁石62により吸着して母材84上にある所定の溶接位置へと搬送した後、当該所定の溶接位置より所定間隔空けた真上位置で当該板材の吸着を解除することでマグネット部及びガイド部58により板材の姿勢を保持しつつ当該所定の溶接位置に当該板材を落下させて配設する。
(もっと読む)
ワーク設置装置とワーク設置方法
【課題】 わずかに位置誤差があってもワーク搬送装置のロボットハンドが被設置部材に干渉することなくワークを把持、搬送することができるとともに、ワークに把持部を設けなくても搬送できるワーク設置装置とワーク設置方法を提供することである。
【解決手段】 3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に外周面1bを開放可能に把持可能な複数のツメ部材12と複数のツメ部材12を互いに連動して水平方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12はワーク1の外周面1bを把持する把持面12bと水平な底面1cを支持する支持面12cとを有する。被設置部材2は、上端部に案内テーパ面2bを有しワーク1の外周面1bと嵌合する嵌合部2aと、ワーク1の底面1cを支持する底面支持部2cと、ワーク1が鉛直に下降してその底面1cが底面支持部2cに載る位置まで複数のツメ部材12と干渉しないように設けられた切り欠き溝2dとを有する。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
81 - 100 / 278
[ Back to top ]