
Fターム[3C007MT01]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 操作の容易化 (178)
Fターム[3C007MT01]に分類される特許
41 - 60 / 178
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
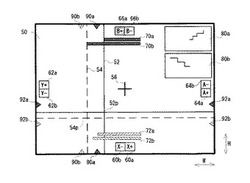
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
裁断機

【構成】 裁断機は、裁断ベッドと裁断ヘッドとを備えた裁断機本体と、裁断機に固定のコントローラと、方向指示入力部を備えたハンディコントローラとを備えている。裁断機に対するハンディコントローラの位置、あるいはハンディコントローラの方向を検出し、検出した位置あるいは方向に従って、方向指示入力部の設定を切り替える。
【効果】 裁断機のいずれの側からハンディコントローラを操作する場合でも、手前と奧及び右と左の関係が作業者の感覚と一致する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
動作入力装置
【課題】 イネーブルスイッチを操作しながら、他の入力操作を行うことができる動作入力装置の提供
【解決手段】 ティーチング装置1は、把持部11及び操作部13を有している。使用者は、ティーチング装置1を使用する際に、把持部11を掌及び第二指〜第五指を用いて把持する。操作部13は、把持部11を使用者が把持したときの第二指側に、把持部11に続いて配置されている。把持部11は、イネーブルスイッチ111を有している。使用者は、第二指〜第五指を用いてイネーブルスイッチ111を操作する。入力部131は、操作部13において把持部11が配置されている側とは反対側に位置する面P13に配置されている。これにより、把持部11を掌及び第二指〜第五指で把持しながら、入力部131への第一指による操作が可能となる。なお、入力部131は、タッチパッド133、液晶ディスプレイ135及び表示制御部137により構成されている。
(もっと読む)
ハンドガイドシステムの視覚情報支援装置
【課題】作業対象物の狭所へワークを挿入して組付ける場合や、ハンドガイドシステムの操作部と作業対象物の組付け位置が離れている場合でも、人の死角となる狭所での作業を可能にすることができるハンドガイドシステムの視覚情報支援装置を提供する。
【解決手段】手動操作盤によりロボットハンドを操作して作業対象物にワークを組付けるハンドガイドシステムの視覚情報支援装置であって、ロボットハンドのワーク近傍に設けられ作業対象物2の死角領域の画像を取得するカメラ32と、ロボットハンドのワーク近傍に設けられ作業対象物の前記画像領域にスリット状、円弧状、スポット状又はこれらの組合せのレーザ光を照射するレーザ装置34と、手動操作盤近傍に設けられ前記画像を表示するモニタ36とを備える。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
インピーダンス制御パラメータの調整装置および調整方法
【課題】 インピーダンス制御の複数のパラメータを個人のスキルに依存することなく、特別な知識を有していなくても、常に最適なパラメータを調整できるようにする。
【解決手段】 パラメータ初期値算出部117と力指令印加部111と評価基準計測部112と許容値設定部113と粘性パラメータ探索部114と終了判断部115と慣性パラメータ調整部116を備え、力指令印加部11はインピーダンス制御部に対して力指令を入り切りし、評価基準計測部112は力応答の整定時間とオーバシュート量と振動回数を計測し、許容値設定部113はオーバシュート量と整定時間の許容値を設定し、粘性パラメータ探索部114は整定時間が最小となる粘性パラメータを探索し、終了判断部115は調整値と許容値を比較して処理の終了あるいは継続を判断し、慣性パラメータ調整部116はオーバシュート量と整定時間の調整値に応じて慣性パラメータを調整する。
(もっと読む)
ロボットのツールの位置の微調整方法及びロボット制御システム
【課題】
教示位置の微調整時の操作手順が減るため、教示時間を低減させることが可能であり、回転操作手段の操作のみで予め定められた動作座標系の予め定められた進行方向の座標軸に沿って移動させることができ、位置の微調整時の教示を楽に行うことができるロボットのツールの位置の微調整方法及びロボット制御システムを提供する。
【解決手段】
回転操作部材13をエンターキー11aにより溶接トーチTの位置の微調整操作手段として割付する。回転操作部材13が操作された際、回転操作部材13の回転量及び回転方向をロータリエンコーダ14に検出させて、回転量及び回転方向をコントローラ20に通知する。コントローラ20のCPU21が、回転量の単位毎に予め定めた寸動量で、かつ、回転方向と対応して、予め定められたツール座標系のZ軸に沿って、ロボットRを動作制御し、溶接トーチTの位置の微調整を行う。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
ロボットシステム
【課題】選択されたプログラムに基づいたロボットの動作の移動軌跡を使用者にとって理解し易い形態で表示させることができるロボットシステムを提供する。
【解決手段】制御装置は、仮想動作開始指令が与えられると第1の仮想制御を実行する。第1の仮想制御が行われることにより、パソコンのディスプレイ14には、ロボット2のエンドエフェクタ8の初期位置を起点とし、選択したプログラムに記述された最初の5個の教示目標点P1〜P5を通るロボット2の動作の軌跡が、その移動順番が分かる状態で表示される。
(もっと読む)
ロボット制御装置及びロボット操作用デバイス
【課題】ワークをツールでグリップしたロボットを、操作者がワークを直接動かすのと同じ感覚で操作者の意図する通りに、イネーブルスイッチの操作を併用しながらスムーズに操作できるようにすること。
【解決手段】ロボットのグリッパ17でグリップしたワーク21の対向する2面に、着脱ユニット63の吸着盤63aを用いてロボット操作用デバイス60のベース61をそれぞれ固着する。ベース61に力覚センサ65を介して取り付けられた各ロボット操作用デバイス60の操作ハンドル67を両手で把持した操作者が、操作ハンドル67のイネーブルスイッチ67bをオン操作しながら、ワーク21を動かす操作力を各操作ハンドル67にそれぞれ加える。各操作力を方向別に力覚センサ65で検出してその検出信号をロボットの制御装置に出力し、制御装置は検出信号に基づいてロボットを動作させる。
(もっと読む)
ロボットのツール先端点の位置の計測装置および計測方法
【課題】代替治具を使用せずに、ツール取付面に対するツール先端点の位置を高精度で短時間に計測する。
【解決手段】ロボット(1)のツール取付面(32)に取付けられたツール(30)の、ツール取付面に対するツール先端点(31)の位置を求める計測装置は、ロボットのアーム先端部に取付けられたカメラ(4)と、ロボットの作業空間内に設置されたタッチアップ用ポイント(Σmの原点)と、ロボットとカメラとによってタッチアップ用ポイントの位置を計測する計測部(11a)と、計測されたタッチアップ用ポイントの位置を記憶する第一記憶部(12a)と、ロボットを移動させることにより、ツール先端点がタッチアップ用ポイントに位置合わせされたときのロボットの位置を記憶する第二記憶部(12b)と、記憶されたタッチアップ用ポイントの位置とロボットの位置とを用いて、ロボットのツール取付面に対するツール先端点の位置を計算する計算部(11b)とを含む。
(もっと読む)
オフラインプログラミング方法、オフラインプログラミングシステム、オフラインプログラミング装置及びティーチペンダント
【課題】
TPを使用して、PCに実装されているOLPSを操作して、ロボットの作業プログラムを作成できるオフラインプログラミング方法、及びオフラインプログラミングシステムを提供する。
【解決手段】
オフラインプログラミング方法及びシステムでは、ロボットの教示データを入力するためのキー群を備えたキーボード106を有するTP100から、キー群の操作によるTPキーコードを送信する。オフラインプログラミング装置200では、送信されたTPキーコードを受信して、TPキーコードをOLPSキーコードに変換し、OLPS実行部220が、変換されたOLPSキーコードによるロボットの教示データに基づいてロボットの作業プログラムの作成を行う。
(もっと読む)
汎用ロボット移動教示装置
【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
ロボット遠隔操縦システムとこれに用いる作業ロボット
【課題】遠隔操縦による作業に必要な画像を自律して取得しつつ、一台の作業ロボットのみで作業を行うことができるようにする。
【解決手段】本発明は、作業対象物の測距データを取得するための測距部、作業対象物に対する作業を行う作業用アーム、作業対象物の画像を取得するための撮像部を配設した画像取得用アーム及びそれら各アームを駆動するためのアーム駆動部を設けた作業ロボットBと、作業ロボットBと通信回線を介して接続されるとともに、作業対象物の画像を表示するための表示部、作業ロボットBを遠隔操縦するための操縦情報を生成して当該作業ロボットBに向けて送信する遠隔操縦装置Cとを有するものであり、測距部によって取得した測距データに基づき、作業対象物を撮像部によって撮像できるようにアーム画像取得用アームをアーム駆動部によって自律的に移動させるアーム自律移動手段30aを作業ロボットBに設けている。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、ハンドガイドロボット1による一連の作業を複数の作業工程に分割し、該作業工程毎に各軸方向への移動および各軸回りの回転それぞれの自由度について、個別に制限または非制限を制御テーブルとして設定し、制御装置40により、各作業工程毎の制御テーブルに応じてマニピュレータを駆動制御し、操作者からの作業工程切替指示を受け付ける。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30(入力手段)を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、移動制限設定ボタンスイッチB1および回転制限設定ボタンスイッチB2により、軸方向への移動および軸回りの回転の自由度について、1以上の自由度を制限または非制限を設定し、制御装置40により、操作者の複数の設定手段を介した自由度の制限または非制限の設定に応じてマニピュレータを駆動制御する。
(もっと読む)
41 - 60 / 178
[ Back to top ]