
Fターム[3C058BB02]の内容
仕上研磨、刃砥ぎ、特定研削機構による研削 (42,632) | 制御 (755) | 制御手段 (548) | 電気的制御 (418)
Fターム[3C058BB02]に分類される特許
21 - 40 / 418
超仕上げ加工方法および超仕上げ加工装置
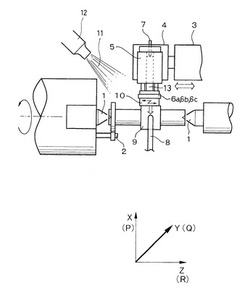
【課題】安定した加工状態を得ることが可能な超仕上げ加工方法および超仕上げ加工装置を提供する。
【解決手段】回転する工作物9に砥石台4に支持した砥石10を揺動させながら押し当てる超仕上げ加工装置の砥石台4に、回転する工作物9の接線方向の分力Qを検出する主分力センサ6a、押し当て方向の分力Pを検出する背分力センサ6b、砥石10の揺動方向の分力Rを検出する揺動荷重センサ6c、砥石10の押し当て方向の移動量を検出する移動量センサ7、工作物9の寸法減少量を検出するインプロセスゲージ8を設ける。そして、「粗」→「仕上げ」に応じて変化するセンサ6a、6bの出力に基づき加工状態を判定し、加工条件(回転数、揺動数、押し付け力)を変化させて加工効率を改善する。また、前記センサ6a、6b、移動量センサ7とインプロセスゲージ8の出力を用いて研削異常を検出し砥石の不具合への対処を行うことにより、安定した加工状態を得ることができるようにする。
(もっと読む)
ワイヤソー装置およびワーク切断方法、ウエハの製造方法

【課題】従来装置と比較してより高い張力で、ワイヤ断線なくワークの切断を素早く実現する。
【解決手段】各溝付ローラ2,3間に巻き付けられた切断用のワイヤ4の一方端が第1ダンサローラ10を介して供給ボビン5に巻き付けられ、他方端が第2ダンサローラ13を介して回収ボビン6に巻き付けられて、各溝付ローラ2,3間のワイヤ4の複数列でワーク7を切断するワイヤソー装置1において、各溝付ローラ2,3と第1ダンサローラ10および第2ダンサローラ13との間にそれぞれ、第1バッファボビン手段としての第1バッファボビン14と第2バッファボビン手段としての第2バッファボビン18がそれぞれ配設され、各溝付ローラ2,3と第1バッファボビン14との間に第3ダンサローラ17が配設されると共に、各溝付ローラ2、3と第2バッファボビン18との間に第4ダンサローラ21が配設されている。
(もっと読む)
レンズ研磨方法及びレンズ研磨装置
【課題】研磨ムラの少ない高精度のレンズ研磨を効率的に行うことが可能なレンズ研磨方法およびレンズ研磨装置を提供する。
【解決手段】レンズ研磨方法は、研磨装置の回転軸に保持され該回転軸を中心に回転駆動するレンズに対し、研磨ツールが回転軸の軸線と直交する方向及び軸線方向から、レンズの光学面に回転軸を中心に同心円状又は螺旋状のいずれかの研磨軌跡を描くように光学面を非球面形状に研磨するレンズ研磨方法であって、レンズを、研磨軌跡の旋回中心から離間した位置に配置する工程と、研磨ツールが光学面を研磨する時に、研磨ツールと光学面との間に所定の圧力を付与する工程とを備える。
(もっと読む)
ワイヤソー
【課題】張力調整装置や複数のガイドローラを設置する必要がなく、ワイヤソーを簡単かつ小型にすることができ、ガイドローラによりワイヤに捩れが生じるのを抑制することができるとともに、ガイドローラによるイナーシャの問題をなくし、ワイヤの断線率を低減することができるワイヤソーを提供する。
【解決手段】ワイヤ12を掛け渡す複数の加工ローラ11A,11Bと、加工ローラ11A,11B間にワイヤ12を供給する供給側のボビン13A,13Bと、使用済みワイヤ12を巻き取る巻き取り側のボビン13B,13Aとを備える。両ボビン13A,13Bを軸線方向に沿ってトラバース動作させるトラバース機構16と、加工ローラ11A,11Bと両ボビン13A,13Bとの間のワイヤ12の張力を検出するセンサ18と、そのセンサ18の検出に基づいて、ワイヤ12の張力を調整する方向に、ボビン13A,13Bを移動させる張力調整機構17とを設ける。
(もっと読む)
研磨パッド、研磨装置、研磨方法
【課題】前記研磨パッドを使用してCMP法の研磨を実施するに際し、前記研磨対象物の外周部の研磨量を抑える技術を提供する。
【解決手段】Chemical Mechanical Polishing(CMP)法においてリテーナリング9の内周側に配置される半導体ウェハ8(研磨対象物)を研磨するための研磨パッド10は、研磨パッド10の研磨面10aを有する硬質層12と、硬質層12を挟んで半導体ウェハ8と反対側に配置され、硬質層12よりも軟質である軟質層13と、を有する。研磨面10aに異なる荷重を作用させた際の研磨面10aの窪み量の差分である特定窪み量差分値ΔTが86[μm]以下である。以上の研磨パッド10を用いれば、図3及び図4、図6に示すように、研磨パッド10を使用してCMP法の研磨を実施するに際し、半導体ウェハ8の外周部の研磨量を抑えることができる。
(もっと読む)
グラインダー用駆動装置及びそれを備えたグラインダー
【課題】簡単な手段によって安全性を高めたグラインダー用安全装置を提供する。
【解決手段】グラインダー用駆動装置8は次の特徴の内の1つ又は複数を有する:駆動手段は少なくとも3つの駆動装置を有すること;安全手段は、各駆動アセンブリ12の故障を検出するための故障検出手段28と、この故障検出手段28によって検出される故障に応答して全ての電動機14のスタートを妨げるに適した制御手段22を有すること;この故障検出手段28は、各減速手段16に1つの減速装置故障センサ34を有すること;少なくとも2つの駆動アセンブリ12、及び好ましくは全ての駆動アセンブリ12は同一であること;
(もっと読む)
被加工物の加工方法
【課題】被加工物を1回で精度良く加工できるようにすること。
【解決手段】加工方法は、単位除去形状と被加工物との相対向きを変え、各相対向きの計算除去形状と目標除去形状の差分の内、最小の差分となる相対向きに回転研磨工具の回転軸と被加工物との相対位置を位置決めし、かつ滞留時間分布に従った、相対速度で被加工物を加工するようになっている。このため、本発明の加工方法は、1回の走査で、誤差の少ない加工が可能であるため、被加工面の高精度化と、繰返し加工する回数が減ることによる加工能率の向上が可能になる。
(もっと読む)
ワイヤソー装置及び切断加工方法
【課題】揺動角度が大きくなっても、ワイヤの撓みを抑制することができ、バランスよく切断できるワイヤソー装置等を提供する。
【解決手段】走行しながら揺動する切断用ワイヤ3に被加工物Wを押し付けて被加工物Wを切断するワイヤソー装置1である。揺動するワイヤガイド支持部4に配置され、各々が回転する一対のワイヤガイド2、これらワイヤガイド2の周囲に螺旋状に巻き付けられる1本の切断用ワイヤ3の巻き出し及び巻き取りが可能なワイヤ供給装置6及びワイヤ巻取装置7、変位して被加工物Wを切断用ワイヤ3に押し付けるワーク保持部50、制御装置8を備える。制御装置8が、ワイヤガイド支持部4の揺動角度の変化に反比例してワーク保持部50の変位速度を制御する変位制御手段8aや、ワイヤガイド支持部4の揺動角度の変化に反比例してその揺動速度を制御する揺動制御手段8bを有している。
(もっと読む)
研磨ヘッド、研磨装置及びワークの研磨方法
【課題】ワックスレス方式の研磨ヘッドにおいて、バッキングフィルムのライフ初期の外周部の反り上がりを抑制し、ワークの研磨前の形状に依らずにワークを高平坦に研磨可能な研磨ヘッド、研磨装置、及びワークの研磨方法を提供する。
【解決手段】ワークの表面を定盤上に貼り付けた研磨布に摺接させて研磨する際に前記ワークを保持するための研磨ヘッドであって、少なくとも、前記ワークの裏面を保持するための、セラミックからなり、かつ、可撓性を有するワーク保持盤と、該ワーク保持盤の前記ワークを保持する側と反対の面上に形成された密閉空間と、該密閉空間内の圧力を制御する圧力制御手段とを有し、前記圧力制御手段で前記密閉空間内の圧力を制御することによって、前記可撓性を有するワーク保持盤の形状を中凸形状又は中凹形状に調整できるものであることを特徴とする研磨ヘッド。
(もっと読む)
バレル研磨装置
【課題】複雑な形状のワークをバレル研磨する場合に、そのワークの箇所により、過研磨の箇所と未了研磨の箇所いわゆる研磨ムラが生じやすく、一定品質の研磨ができない点である。
【解決手段】研磨媒体を収容する研磨媒体収容槽内において、ワークと研磨媒体とが擦れ合って生ずる摩擦によりワークの表面を研磨するバレル研磨方法において、ワークの自転運動、上下運動、振り子運動を、互いに連動することなく独立させて運動させ、ワークが研磨媒体収容槽内において特定軌道を描くことができないようにしたバレル研磨方法を提供するものである。
(もっと読む)
化学機械的研磨のスペクトルに基づく監視のための装置および方法
【課題】研磨ステップの終点が達成された時を決定するステップを提供する。
【解決手段】スペクトルに基づく終点検出、スペクトルに基づく研磨速度調整、光学ヘッド53頂面の噴射、または窓付きのパッド30を含み、スペクトルに基づく終点検出は、具体的なスペクトルに基づく終点論理を適用することで終点が呼び出されるとターゲット厚さが達成されるよう、具体的なスペクトルに基づく終点決定論理を経験的に選択された基準スペクトルを使用して、異なるトレースまたは一連のシーケンスを使用して研磨終点を決定し、噴射システムは、光学ヘッド53の頂面にかけて層状のガス流を作成し真空ノズルと真空源は、ガス流が層状になるように構成され、窓は、柔軟なプラスチック部分と結晶質またはガラス質の部分を含み、スペクトルに基づく研磨速度調整は、基板上の異なるゾーンにスペクトルを得るステップを含む。
(もっと読む)
研磨パッドのコンディショニング方法及び装置
【課題】半導体ウエハ等の基板の被研磨面の中央部における研磨速度の低下を抑え、基板の被研磨面を全面にわたって均一に平坦化することができる研磨パッドのコンディショニング方法及び装置を提供する。
【解決手段】基板Wの表面に形成された薄膜に摺接して薄膜を研磨する研磨テーブル1上の研磨パッド2をドレッサ22を用いてコンディショニングするコンディショニング方法であって、研磨パッド2の中心部と外周部との間を移動して研磨パッド2をドレッシングするドレッサ22の移動速度を研磨パッド2の所定の領域A2で標準移動レシピにおける所定の領域A2の速度より大きくして研磨パッド2のコンディショニングを行い、研磨パッド2の所定の領域A2に摺接して研磨される基板W上の薄膜の研磨速度を高めるようにした。
(もっと読む)
化学機械的研磨のスペクトルに基づく監視のための装置および方法
【課題】研磨の処理が終了したかどうかを決定する。
【解決手段】化学機械的研磨のスペクトルに基づく監視を行う装置および方法は、スペクトルに基づく終点検出、スペクトルに基づく研磨速度調整、光学ヘッド頂面の噴射、または窓付きのパッド30を含む。スペクトルに基づく終点検出は、スペクトルに基づく終点論理を適用することで終点が呼び出されるとターゲット厚さが達成されるよう、具体的なスペクトルに基づく終点決定論理を経験的に選択された基準スペクトルを使用する。異なるトレースまたは一連のシーケンスを使用して研磨終点を決定できる。噴射システムは、光学ヘッド53の頂面にかけて層状のガス流を作成する。真空ノズルと真空源は、ガス流が層状になるように構成されている。窓は、柔軟なプラスチック部分と結晶質またはガラス質の部分を含む。スペクトルに基づく研磨速度調整は、基板上の異なるゾーンにスペクトルを得るステップを含む。
(もっと読む)
分割予定ライン検出方法
【課題】分割予定ラインの間隔が等間隔でないとともに平行でない被加工物の分割予定ラインを正確に迅速に検出可能な分割予定ライン検出方法を提供する。
【解決手段】分割予定ライン検出方法であって、撮像手段を分割予定ラインに沿って相対的に移動して、第1アライメントマークPと、中間アライメントマークRと、第2アライメントマークQとの間隔に対応して各アライメントマークP、R、Qを撮像して記憶する往路アライメントマーク撮像工程と、撮像手段を隣接する分割予定ラインに移動し、各アライメントマークP,R,Qを撮像して記憶する復路アライメントマーク撮像工程と、該往路アライメントマーク撮像工程と該復路アライメントマーク撮像工程とを複数回繰り返して複数の分割予定ラインに関するアライメント情報を取得した後、位置情報から最小二乗法により、分割予定ラインを検出する分割予定ライン検出工程と、を具備した。
(もっと読む)
ワイヤソー装置およびワーク切断方法、ウエハの製造方法
【課題】ワイヤ走行時のワイヤの捩れによるワイヤ断線を防止してワークの歩留まりを向上させると共に、捩れに弱い細い高張力ワイヤを安定的に用いて精度のよい加工をする。
【解決手段】ワイヤ4の捩れをモニタリングし、モニタリングしたワイヤの捩れ状態に応じてワイヤ4の複数列を溝付きローラ2,3の軸方向に移動させてワイヤ4の捩れを緩和させるワイヤ捩れ緩和手段19を有している。このワイヤ捩れ緩和手段19は、2箇所で同一ワイヤ位置の側面映像を撮影するワイヤ側面撮影手段191,192と、ワイヤ側面撮影手段191,192で撮影した二つのワイヤ側面映像に基づいてワイヤ4の捩れ状態を検出するワイヤ捩れ検出手段193と、ワイヤの捩れ状態に応じてワイヤ列を溝付きローラ2,3の軸方向に移動調整してワイヤ4の捩れを緩和するワイヤ列調整手段194とを有している。
(もっと読む)
研磨装置に使用される研磨パッドの研磨面を監視する方法および装置
【課題】研磨パッドのコンディショニングのレシピチューニングに費やされるコストおよび時間を大幅に低減し、研磨パッドを研磨テーブルから剥がすことなく研磨パッドの研磨面を監視することができる方法を提供する。
【解決手段】本方法は、回転するドレッサー50を研磨パッド22の研磨面22a上を揺動させて該研磨面22aをコンディショニングし、研磨面22aのコンディショニング中に研磨面22aの高さを測定し、研磨面22a上に定義された二次元平面上における、研磨面22aの高さの測定点の位置を算出し、研磨面22aの高さの測定と測定点の位置の算出を繰り返して、研磨面22a内における高さ分布を生成する。
(もっと読む)
バリ取り装置
【課題】 コンベアに対するブラシ部材の相対高さの調整を自動で行え、調整のばらつきを抑え、かつ調整作業が容易なバリ取り装置を提供する。
【解決手段】 バリが上面に形成されたワークWを水平に搬送するコンベア1と、コンベア1の上方に配置されたバリ取りヘッド2と、コンベア1に対するバリ取りヘッド2の相対高さを調整する相対高さ調整機構3とを備える。バリ取りヘッド2は、ブラシ軸心O1回りに回転自在なロール状のブラシ部材20と、ブラシ部材20を旋回軸心O2回りに旋回自在に支持する旋回支持部材26とを有する。相対高さ調整機構3は、昇降駆動源50によりコンベア1またはバリ取りヘッド2を昇降させる。ブラシ部材20の下端を検出可能な投受光式のブラシ下端検出手段50と、ブラシ部材20の下端の検出に基づき昇降駆動源50を制御する昇降制御手段61とを設ける。
(もっと読む)
ワイヤソー装置およびワーク切断方法、ウエハの製造方法
【課題】ワイヤ供給側(新線側)ワイヤの張力を低減してワイヤの撓み量をワイヤ供給側からワイヤ回収側に渡って一定に保持して、ワイヤの断線リスクを抑制すると共に、ワイヤ供給側とワイヤ回収側でワーク切断能力を均一にできて切断厚さのバラツキを低減する。
【解決手段】所定の間隔で配置された複数(ここでは二つ)の溝付きローラ2,3の外周溝に巻き付けられた切断用のワイヤ4を走行させてワイヤ4の複数列でワークである半導体インゴット7を切断するワイヤソー装置1において、溝付きローラ2,3間に張架されたワイヤ張力のうち、ワイヤ回収側のワイヤ張力を大きくし、ワイヤ供給側のワイヤ張力を小さくした張力制御手段16を有している。
(もっと読む)
半導体装置の製造方法および化学機械研磨装置
【課題】化学機械研磨装置において、コンディショニングディスクを駆動するアームおよび軸受け部を適切に管理できる方法を提供する。
【解決手段】研磨パッドを担持したプラテンを回転させながら、前記研磨パッドの表面をコンディショニングディスクによりドレッシングする工程を含み、前記コンディショニングディスクを前記研磨パッドの表面に押圧し、さらに前記アームを前記アームの回転軸回りで回転運動させ、前記コンディショニングディスクの位置を、前記プラテンの径方向上に、前記プラテンの中心部と外周部との間で変化させることにより実行され、前記ドレッシングの際、前記アームに作用するトルクの平均値<N>および変動幅Yを、前記コンディショニングディスクの、前記プラテンの径方向上における複数の位置にわたって求め、前記トルクの平均値<N>および前記トルクの変動幅Yの値をもとに、前記アームに対するメンテナンスの要否を判定する。
(もっと読む)
ワイヤソー装置及び切断加工方法
【課題】揺動切断の際に発生するワイヤの局所的な張力変動を抑制する。
【解決手段】往復走行しながら揺動する切断用ワイヤ3に被加工物Wを押し付けて切断するワイヤソー装置1である。揺動するワイヤガイド支持部4や、ワイヤガイド支持部4に配置された一対のワイヤガイド2、2、切断用ワイヤ3を一対のワイヤガイド2、2に巻き付けることにより、これらワイヤガイド2、2の間に形成されるワイヤ群3a、切断用ワイヤ3の巻き出し及び巻き取りが可能なワイヤ供給装置6とワイヤ巻取装置7、変位して被加工物Wをワイヤ群3aに押し付けるワーク保持部50、制御装置8を備える。制御装置8が、切断用ワイヤ3の走行速度を制御する走行速度制御手段8aと、切断用ワイヤ3の走行速度の増減に応じてワイヤガイド支持部4の揺動速度を増減制御する揺動速度制御手段8bとを有している。
(もっと読む)
21 - 40 / 418
[ Back to top ]