
Fターム[3C058BB02]の内容
仕上研磨、刃砥ぎ、特定研削機構による研削 (42,632) | 制御 (755) | 制御手段 (548) | 電気的制御 (418)
Fターム[3C058BB02]に分類される特許
61 - 80 / 418
フィレットローラの欠損判定装置およびその方法
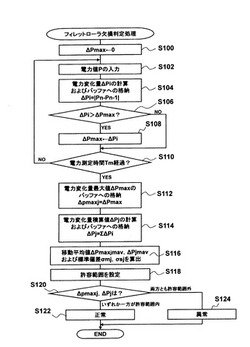
【課題】簡易な制御でありながら、精度よくフィレットローラの欠損を判定する。
【解決手段】逐次算出した所定時間あたりの電力変化量ΔPiを用いて電力変化量積算値ΔPjおよび電力変化量最大値ΔPmaxjを算出し(ステップS102〜S108,S114)、電力変化量積算値ΔPjと電力変化量最大値ΔPmaxjとを含む直近20ケの電力変化量積算値ΔPj−19〜ΔPjおよび電力変化量最大値ΔPmaxj−19〜ΔPmaxjを用いて許容値範囲ΔPjmav±3σsjおよびΔPmaxjmav±3σmjを設定して(ステップS112〜S118)、電力変化量積算値ΔPjおよび電力変化量最大値ΔPmaxjが許容値範囲ΔPjmav±3σsjおよびΔPmaxjmav±3σmjの範囲内であるか否かによってフィレットローラRが欠損しているか否かを判定する(ステップS120)。この結果、簡易な制御で欠損判定をすることができる。
(もっと読む)
円筒状単結晶シリコンインゴットブロックを四角柱状ブロックに加工する切断装置および切断方法

【課題】 円筒状シリコンインゴットの側面剥ぎ切断装置上で、円筒状単結晶シリコンインゴットの結晶方位を正確に検知する方法および外周刃の横揺れ幅を小さくすることができる自己補償機構の提供。
【解決手段】 加圧冷却液供給パッド一対96p,96pを外周刃91aを挟んで外周刃の前面および後面に設け、ポンプ96pより供給される加圧液体の供給管を2分岐し、分岐された供給管のそれぞれの先端を前記一対の加圧冷却液供給パッドの液体貯め空間に望ませた外周刃横揺れ自己補償機構96。および、レーザ光反射型変位センサsを用い、円筒状単結晶シリコンインゴットの結晶方位を正確に検知する。
(もっと読む)
処理の終点検出方法および処理の終点検出装置
【課題】本発明の実施形態は、処理の終点に対する検出精度を向上させることができる処理の終点検出方法および処理の終点検出装置を提供する。
【解決手段】実施形態に係る処理の終点検出方法は、被処理物の処理に伴って時間とともに変化する検出情報を所定の期間収集して単位空間を定義し、前記単位空間を構成する検出情報について平均値と、標準偏差と、を求める。そして、以下の(9)式に基づいて終点検出の判定対象となる検出情報を基準化し、以下の(10)式に基づいて距離を求め、前記距離に基づいて処理の終点を検出する。
Xt=(X−Xm)/σm ・・・(9)
D2=Xt2 ・・・(10)
ここで、Xmは前記単位空間における平均値、σmは前記単位空間における標準偏差、Xは前記終点検出の判定対象となる任意の時間における検出情報、Xtは基準化された検出情報、D2は距離である。
(もっと読む)
大型平面部材研磨・洗浄装置
【課題】本発明は、大型平面部材の上面および下面を同時に研磨および/または洗浄を行うことができる自動研磨・洗浄装置に関するものである。
【解決手段】本発明の大型平面部材研磨・洗浄装置は、複数組のブラシ組立体により、前記大型平面部材の移動中に、上面および下面を同時に研磨および/または洗浄することができる。前記複数のブラシ組立体は、大型平面部材の研磨および/または洗浄に合った、異なる種類のブラシ毛および構造の異なるブラシから構成されている。また、前記大型平面部材研磨・洗浄装置は、前記異なる複数組みのブラシに対する駆動速度をそれぞれ別々に制御することができる。本発明の大型平面部材研磨・洗浄装置は、大型平面部材に合った素材から構成されている複数組のブラシ組立により、上下同時に研磨および/または洗浄を行うことができるようになっているため、前記大型平面部材を一方向に流すのみで、上下両面の研磨および/または洗浄を終了させることができる。
(もっと読む)
加工方法
【課題】 一つの環状フレームの開口部内に粘着シートを介して複数の被加工物を装着して研削や研磨を実施する場合にも、全ての被加工物を所定の厚みへと薄化可能な加工方法を提供することである。
【解決手段】 環状フレームFに貼着された粘着テープTの中心に第1ウエーハ11を貼着し、複数の第2ウエーハ13をその周りに貼着したウエーハユニット15を形成する。チャックテーブル36の回転軸から第2ウエーハ13の最外周位置までの長さより大きい半径を有する研削ホイール22の外周縁が第1ウエーハ11の中心を通過するように、チャックテーブル36と研削ホイール22の位置関係を設定する。厚み測定器46で第1ウエーハ11の厚みを測定しながら第1及び第2ウエーハ11,13の研削を実施する。第1ウエーハ11の厚みが所定厚みへ達した際に研削送りを停止することにより、全てのウエーハ11,13を所定の厚みへと研削することができる。
(もっと読む)
原子炉用制御棒の表面処理装置及びその表面処理プログラム
【課題】均一な磨き施工が困難な構造を有する原子炉用制御棒に対し、自動化した表面処理技術を提供する。
【解決手段】原子炉用制御棒の表面処理装置10において、回転する研磨材35を装着したツール30と、原子炉用制御棒の表面に当接する研磨材35の当接力を検知する検知手段20と、前記当接力が所定範囲になるようにツール30をその表面に走査させる架台11と、を備えることを特徴とする。
(もっと読む)
軟質材料の表面加工を行うラッピング装置及びラッピング加工方法
【課題】軟質材料からなる工作物に対して、簡素な構成で高精度かつ高加工能率で研磨加工を可能とするラッピング工具を備えたラッピング装置及びその加工方法を提供する。
【解決手段】ラッピング装置2は、端子部11を備えたラッピング工具1と、テーブル23上に設けられかつラップ剤4を貯留して該ラップ剤中に工作物3を浸漬させるための加工槽24などを有する。工作物3には軟質材料が用いられ、端子部11には、熱可塑性樹脂からなる端子本体12と、端子本体を加熱するための加熱手段13と、が設けられる。加熱手段の加熱量を制御して端子本体の表面温度を最適温度に調節するための温度制御手段をさらに有する。最適温度は、工作物3の硬度と端子本体表面12aの硬度との硬度比が0.4以下になるように設定されている。
(もっと読む)
ホーニング加工装置及びホーニング加工方法
【課題】面が湾曲しているボア部の加工において、加工量が検出できるホーニング加工技術を提供する。
【解決手段】砥石22よりヘッド本体30の先端側に配置される第1エアマイクロノズル11と、第1エアマイクロノズル11からヘッド本体30の基端側にホーニングヘッド一回転若しくは複数回転当たりの軸方向の送り量だけ離して配置される第2エアマイクロノズル12と、第1エアマイクロノズル11と被加工面との距離を検出する第1距離検出手段13と、第2エアマイクロノズル12と被加工面との距離を検出する第2距離検出手段14と、第1距離検出手段13で得られた距離と第2距離検出手段14で得られた距離との差を求める演算手段16とを備える。
【効果】様々な形状の被加工面に対して加工量の検出を行うことができる。
(もっと読む)
表面加工装置
【課題】加工対象のワークを効率的に研削、研磨するための表面加工装置を提供する。
【解決手段】表面加工装置20のロードユニット30において、ワークWはトランスファチャック10に吸着させる。そして、トランスファチャックに固定されたワークWは、研削ユニット40に搬送され、研削が行なわれる。研削を終了した場合、トランスファチャック10に固定されたワークWは、研磨ユニット50に搬送される。そして、ワークWが一括処理枚数に達した場合には、バッチ処理により研磨が行なわれる。研磨を終了した場合、トランスファチャック10に固定されたワークWは、ロードユニット30に搬送される。そして、トランスファチャック10からワークWが取り外されて、それぞれ洗浄される。このトランスファチャック10には、新たなワークWを吸着させる。
(もっと読む)
半導体製造システム
【課題】少量多品種では十分サンプル数が集まらないことも考慮し、1)相関状態によって統計的にグルーピングするステップと、2)集まったサンプル数に応じた相関解析を行うステップによりデータマイニングする方式を提供する。
【解決手段】ロガー103はウエハ研磨装置100から送られてくるEQデータ(装置データ)を蓄積する。FA HOST101は半導体装置製造時におけるこれらのEQデータと該半導体装置完成品における実測データをサンプルのパッケージとする。FA HOST101はEQデータを一定の相関閾値を持つか否かで採否を決定する。この際、FA HOST101はサンプル数に応じてこの相関閾値を増減する。
(もっと読む)
加工装置制御システムおよび加工装置制御方法
【課題】加工工程おける被加工製品の生産効率を向上させる。
【解決手段】加工装置制御システム100は、研磨パッド、ドレッサなどの消耗部品の状態を表す物理量(累積使用時間など)から半導体ウェハCMP装置などの加工装置200の装置性能(研磨レートなど)を予測する予測モデル、および、その予測モデルのパラメータを予測するメタ予測モデルを有する。モデル作成シミュレータ部110は、加工履歴データ記憶部140に蓄積されている加工履歴データと予め定めた所定の統計分布に従う乱数とを用いて、シミュレーションにより、そのメタ予測モデルのパラメータを定めるとともに、装置性能の予測モデルのパラメータを定め、そのパラメータを制御演算部130へ送信する。制御演算部130は、受信したパラメータによって定められる装置性能の予測モデルと前記消耗部品の状態を表す物理量の現在値とを用いて、加工装置200に対する制御量を演算する。
(もっと読む)
半導体ウエハの研磨方法及び半導体ウエハ研磨装置
【課題】作業負担を増加させることなく、上下の回転定盤によりキャリアに保持された半導体ウエハの両面を研磨する際の、研磨の進行状況を正確に推定できる半導体ウエハの研磨方法及び半導体ウエハ研磨装置を提供する。
【解決手段】上下の回転定盤2、3によりキャリア6aに保持されたウエハWを挟持し、該上下の回転定盤2、3を回転動作させることにより、ウエハWの両面を同時研磨する研磨装置1を用いたウエハ研磨方法であって、ウエハWの両面を同時研磨している際の、研磨装置1の定盤負荷電流値をモニタし、前記モニタした定盤負荷電流値を用いて一定時間内における定盤負荷電流値の標準偏差を基準時間毎に算出し、前記標準偏差の時間当たりの変化パターンが所定関係を満足したときに、研磨の終了時点であると推定する。
(もっと読む)
研磨装置
【課題】研磨パッドの寿命を正確に決定することができ、研磨パッドの交換頻度を少なくすることができる研磨装置を提供する。
【解決手段】本研磨装置は、研磨テーブル12を回転させるテーブル回転モータ70と、トップリング20を回転させるトップリング回転モータ71と、研磨パッド22をドレッシングするドレッサ50と、研磨パッド22の高さを測定するパッド高さ測定器60と、研磨パッド22の高さから研磨パッド22の減耗量を算出し、研磨パッド22の減耗量と、テーブル回転モータ70のトルクまたは電流と、トップリング回転モータ71のトルクまたは電流とに基づいて研磨パッド22の寿命を決定する診断部47とを備える。
(もっと読む)
半導体装置の製造方法
【課題】異方性エッチングを利用して、1つの銅膜に配線パターンとビアパターンとを同時に形成することが可能な半導体装置の製造方法を提供すること。
【解決手段】バリア膜100上に、銅膜101を形成する工程と、銅膜101上に、第1のマスク材を形成する工程と、第1のマスク材をマスクに用いて、銅膜101をバリア膜100が露出するまで異方的にエッチングする工程と、第1のマスク材を除去した後、異方的にエッチングされた銅膜101上に、第2のマスク材を形成する工程と、第2のマスク材をマスクに用いて、銅膜101をその途中まで異方的にエッチングする工程と、前記第2のマスク材を除去した後、異方的にエッチングされた銅膜101上に、絶縁物を堆積させ、異方的にエッチングされた銅膜101周囲に、層間絶縁膜106を形成する工程と、を具備する。
(もっと読む)
円盤状基板の製造方法
【課題】研磨装置により円盤状基板の研磨を行う際に、両面の研磨量の差をより小さくすることができ、円盤状基板を配置する位置の違いによる研磨量の差をより小さくすることができる円盤状基板の製造方法を提供する。
【解決手段】表面に測定溝103が形成された2つの測定基板100を研磨機の第1面を研磨する側と2面を研磨する側に測定溝103が対峙するようにそれぞれ配置し、2つの測定基板100を研磨機によって研磨し、2つの測定基板100の測定溝103の研磨後の深さを測定し、研磨機によるガラス基板の両面の研磨条件を調整することを特徴とする円盤状基板の製造方法。
(もっと読む)
磁気ヘッドスライダの製造方法及びプローブ装置
【課題】クラウン形成工程において研磨量をより正確に制御する。
【解決手段】ローバー取付工程では、ローバー1を、第1の面で、凸曲面を有するキーパー16の凸曲面に固定する。この際、ローバーとキーパー16との間に、弾性変形可能な保持部材17を、ローバーの第1の面が保持部材17の外周縁部の内側に入るように介在させる。ローバー研磨工程では、キーパー16に保持されたローバー1を、凹曲面13aを有する回転する研磨定盤の凹曲面13aに押し付けながら、ローバー1の研磨面を研磨する。この際、プローブ32に、弾性復元力が生じるように押し付け力を加えながら、プローブの先端部35aを保持部材17と凹曲面13aとで挟まれた空間Sに向け、プローブを空間に挿入して電極パッド5に当接させ、抵抗体の電気抵抗を監視しながら、ローバー1を研磨する。
(もっと読む)
円盤状基板の製造方法
【課題】研磨機により円盤状基板の研磨を行う際に、一方の面が優先的に研磨される現象を抑制し、両面の研磨量の差をより小さくすることができる円盤状基板の製造方法を提供する。
【解決手段】表面に測定溝103,104が形成された測定基板100をガラス基板の両面を同時に研磨する研磨機に配置し、研磨機に配置された測定基板100の両面を同時に研磨し、研磨後の測定基板100に残された測定溝103,104の深さを測定し、研磨機によるガラス基板の両面の研磨条件を調整することを特徴とする円盤状基板の製造方法。
(もっと読む)
基板加工方法および基板加工装置
【課題】積層した多数枚のガラス基板をずれないように保持して精度良く切削加工などの加工を各ガラス基板に同時に施すことのできるガラス基板加工方法を提案すること。
【解決手段】本発明のガラス基板加工方法では、加工対象の複数枚のガラス基板3を、液体を含浸させて湿潤状態の液体吸収性シート31を挟み、厚さ方向に重ね合わせて基板積層体4を形成し、これを厚さ方向の両側からクランプ機構5によってクランプし、クランプ状態の基板積層体4に、走行状態の1本のワイヤー2を押し付けてガラス基板に対して同時に同一の切削加工を施す。湿潤状態の液体吸収性シートを挟んだ状態で多数枚のガラス基板3がクランプされるので、ガラス基板間の密着力が高く、加工時におけるガラス基板のずれを防止でき、加工精度を高めることができる。
(もっと読む)
終点検出方法
【課題】埋め込み配線層を研磨加工する際の終点検出をより効果的に行うことのできる研磨加工の終点検出方法を提供する。
【解決手段】本発明の実施形態に係る終点検出方法は、半導体基板上に形成された半導体デバイスの埋め込み配線層を研磨する際の終点検出方法であって、半導体基板上に形成された絶縁膜に膜厚測定用の溝をダイシングライン上に形成する工程と、溝を含む絶縁膜上に金属膜を形成する工程と、研磨液を用いて、金属膜を研磨する工程と、ダイシングライン上の溝の位置に対応する窪み内に残存する金属膜の膜厚を計測するステップと、を具備する。
(もっと読む)
研磨装置及び研磨方法
【課題】生産性を低下することなく、研磨後の膜厚の目標値からのずれ量を小さくし、高精度な研磨を行う。
【解決手段】被処理膜の初期膜厚を測定する初期膜厚測定手段6と、測定した複数の基板Wの被処理膜を予め定められた基礎研磨レートから算出された研磨時間により連続して1次研磨する第1研磨手段14と、前記1次研磨された研磨後の被処理膜の膜厚を測定する研磨後膜厚測定手段15と、前記測定した初期膜厚、研磨後の被処理膜の膜厚、及びその時の研磨時間に基づき前記1次研磨された基板毎に前記1次研磨における実研磨レートを算出し、前記算出した実研磨レートに基づき研磨順が隣接する基板間の研磨レート差を算出し、前記算出した研磨レート差が所定の有効範囲内であるか否かを判断し、その結果に基づいて適用される実研磨レートに基づいて研磨時間を算出し、当該研磨時間を次に1次研磨する基板の研磨時間としてフィードバックする制御を行う制御手段20を備える。
(もっと読む)
61 - 80 / 418
[ Back to top ]