
Fターム[3D041AD00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144)
Fターム[3D041AD00]の下位に属するFターム
推進装置、エンジン (3,466)
クラッチ (608)
サイドクラッチ
インチングクラッチ (2)
変速 (1,080)
ブレーキ (1,198)
車両外部状況 (949)
車両状況 (2,223)
Fターム[3D041AD00]に分類される特許
181 - 200 / 618
車両制御装置、ナビゲーション装置、車両制御システム
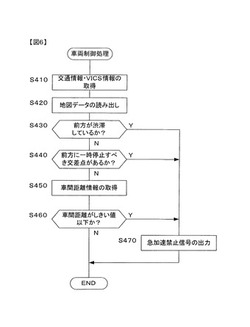
【課題】燃費向上のために適切な制御を車両に対して行う。
【解決手段】ナビゲーション装置は、車両の走行道路に関する情報を取得し(ステップS410、S420およびS450)、取得した情報に基づいて、所定の判定条件を満たすか否かを判定することにより、車両の急加速を禁止すべきか否かを判定する(ステップS430、S440およびS460)。その結果、車両の急加速を禁止すべきと判定したときに、急加速禁止信号を出力する(ステップS470)ことで、車両の急加速を禁止するための制御を行う。
(もっと読む)
自動ブレーキ検査システム

【課題】 駆動系構成部品を監視しながら、駆動系に荷重を付加することによって車両のブレーキ装置を自動的に検査するシステムおよび方法を提供する。
【解決手段】 トラクションモータ(22)に連結された少なくとも1つの牽引要素(23)を備える、車両(V)の駆動系(10)内のブレーキ装置(31)を検査する方法を提供する。この方法は、(a)ブレーキ装置(31)を車両(V)の牽引要素(23)に作動させるステップと、(b)電子制御装置(26)を用いて、トラクションモータ(22)に所定の力を牽引要素(23)へ付加させるステップと、(c)該制御装置(26)を用いて、力を付加しながら牽引要素(23)の動きを監視するステップとを含む。発電制動すなわち「リターダ」機能も検査することができる。また、この方法を実行するシステムも提供する。
(もっと読む)
危険回避支援システム
【課題】この発明は、運転者に通常レベルの安全運転を意識させた上で、危険回避時には、運転者の意図する危険回避動作を素早く且つ確実に支援できる危険回避支援システムを提供することを課題とする。
【解決手段】危険回避支援システム1は、前方車両が急ブレーキをかけた場合など、当該車両が危険回避動作を必要とする状況に陥ったことを検知する検知部2を有する。システムの制御部10は、この検知部2を介して危険回避動作が必要であることを検知したとき、当該車両の動作モードを通常モードから最大支援モードに切り換える。
(もっと読む)
シフト位置指令制御装置
【課題】低圧縮比ディーゼルエンジンにおいて、燃焼不安定性を回避しつつ触媒の暖機が促進されるように、適切にシフト位置の指令を出す。
【解決手段】シフト位置指令制御装置は、低圧縮比ディーゼルエンジンからの動力が伝達される変速機におけるシフト位置の指令を行う。具体的には、シフトアップ指令手段は、低圧縮比ディーゼルエンジンにおける水温、及び排気通路上に配設された触媒の温度の少なくともいずれかに応じて、変速機に対するシフトアップ指令(ハイギヤ指令)を出す。これにより、低水温時での低圧縮比ディーゼルエンジンにおける燃焼不安定性を適切に回避することが可能となる。また、触媒の暖機を適切に促進することが可能となる。
(もっと読む)
車両の制御装置
【課題】第2電動機からの動力を有段式の自動変速機を介して駆動輪(車軸)に出力する車両において、ダウンシフト変速中のショック発生及び自動変速機の摩擦材熱負荷の増大を抑制する。
【解決手段】シーケンシャルモードで高車速走行している場合に、第2モータジェネレータMG2の熱負荷(発熱)を抑制するために高車速ダウンシフト変速線が選択されたときには、シーケンシャルシフト変速線をエンジン回転数を下げる側に変更することで、ダウンシフト変速中に第1モータジェネレータMG1による保護制御(エンジンオーバラン防止制御)が作動しないようにする。これによって、ダウンシフト変速中に第2電動機のトルクダウンを実施して第2電動機のモータの吹きを抑制することができ、変速ショックの低減及び摩擦係合要素の摩擦材の保護が可能になる。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】運転者がアクセルペダルを踏み込んだときに車速の増加に対するエンジンの回転数の上昇と車両の燃費との両立を図る。
【解決手段】アクセル開度Accが急増したときには、アクセル開度Accと車速Vとに基づいてマップから得られる減少程度αにアクセル変化量ΔAccを乗じて減少開度Asetを計算し(S150)、アクセル開度Accから減少開度Asetを減じて初期開度Astartを設定する(S160)。そして、初期開度Astartからレート値Artによるレート処理により増加する値を制御用開度Acc*として設定し(S180,S190)、設定した制御用開度Acc*に基づいて要求トルクTr*と要求パワーPe*を設定してエンジンやモータMG1,MG2を制御する(S200〜S260)。これにより、車速の増加に比してエンジン回転数が急増するのを抑制することができる。
(もっと読む)
作業車の走行変速構造
【課題】 作業車において走行用の変速装置及びガバナ装置を操作する操作レバー及び操作ペダルを備えた場合、ガバナ装置及び走行用の変速装置を一緒に高速側及び低速側に操作できる利点を残しながら、操作ペダルによって適切な操作が行えるようにする。
【解決手段】 操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー11の操作位置に対応するエンジン3の回転数よりも低速側であると、操作レバー11の操作位置に対応する位置にガバナ装置15が操作された状態で、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー12の操作位置に対応するエンジン3の回転数よりも高速側であると、操作ペダル12の操作位置に対応する位置にガバナ装置15を操作し、且つ、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。
(もっと読む)
車両制御装置
【課題】車輪速から得られる車両の走行状態情報を用いて車両挙動を制御することのできる車両制御装置を得る。
【解決手段】車両の左右車輪速と予め車両に応じて記憶されたスタビリティファクタと車両の車速とから車両の実ヨーレートを検出し、この検出した実ヨーレートとハンドル回転角等から得られる車両の基準ヨーレートとから車両の不安定状態を検出するようにしたもので、車両に標準的に装備されるABSの車輪速センサの情報から実際のヨーレート相当の信号を得るので、車両に高価なヨーレートセンサを装備する必要がなくなる。
(もっと読む)
車両制御装置
【課題】自車両の不必要な燃料消費を防止し、燃費を向上させる。
【解決手段】車両制御装置10は、自車両の速度を検出す車両状態センサ13と、自車両の位置を検出する現在位置検出部21と、自車両の進行方向前方に存在する車両停止位置を検出する停止位置検出部25と、自車両が慣性走行をおこなう状態での速度変化を予測する速度変化予測部23と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置に到達する時点での速度を第1速度として算出する第1速度算出部26と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置から所定距離手前の手前位置に到達する時点での速度を第2速度として算出する第2速度算出部27と、第1速度が第1所定値(例えば、ゼロ)以上である場合または第2速度が第2所定値以上である場合に加速制御の実行を禁止する車速制御部28とを備える。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
車両用ヨーレート演算装置
【課題】ヨーレートセンサを用いることなく、車両に発生するヨーレートを精度よく演算する車両用ヨーレート演算装置を得る。
【解決手段】車両の左前輪1FL、右前輪1FR、左後輪1RL、右後輪1RRにそれぞれ配置された車輪速センサ2FL、2FR、2RL、2RRにより、車輪速度を検出し、この車輪速センサ2FL、2FR、2RL、2RRの出力である車輪速信号VFL、VFR、VRL、VRRは、ヨーレート演算装置3へ入力され、まず、車速が演算され、次いで車速と、予めメモリに記憶されたスタビリティファクタとを用いて、ヨーレートが演算される。
(もっと読む)
走行軌跡生成装置及び走行軌跡生成方法
【課題】路面に応じて安全性と実用性とを両立させた走行軌跡を生成することができる走行軌跡生成装置及び走行軌跡生成方法を提供する。
【解決手段】
走行軌跡生成装置は、車両5が走行する通過予定経路Dにおいて、路面D1が滑りやすいと判定された特定区間E2を取得する路面状況取得部20と、特定区間E2では車両モデルを慣性運動とすると共にタイヤ発生力が摩擦円限界を超えないことを含まない第1拘束条件を達成するように収束演算して走行軌跡を生成する走行軌跡導出部21とを備えることにより、車両5のスピンを特定区間E2手前での減速制御のみで回避するのではなく、特定区間E2においては、ある程度のスリップ状態を許容しているので、必要以上の減速を伴わず、実用性が確保された走行軌跡を生成することができる。
(もっと読む)
衝突回避装置
【課題】車間距離が短い場合であっても、車両間の衝突を回避することができる衝突回避装置を提供する。
【解決手段】衝突回避装置1は、衝突予測装置10と、車両跳上げ装置11と、制御装置12とから構成されている。衝突予測装置10は、他車両200との衝突を予測する装置である。車両跳上げ装置11は、自車両100を路面から跳上げる装置である。制御装置12は、通信によって他車両200との間で情報をやり取りし、衝突予測装置10が他車両200との衝突を予測したとき、他車両200の情報に基づいて自車両100を跳上げるか否かを決定し、決定結果に基づいて車両跳上げ装置11を制御する。これにより、車間距離が短い場合であっても、自車両100を跳上げ他車両200の上方を通過させることで車両間の衝突を回避することができる。
(もっと読む)
車線追従制御装置および車線追従制御方法
【課題】ドライバに違和感を与えることなく車線追従制御を行うことが可能な車線追従制御装置および車線追従制御方法を提供する。
【解決手段】車線追従制御装置1は、自車両MCが走行する走行路Rを検出する走行路検出手段2と、走行路の基準線CLからの自車両の横位置偏差ΔXおよび基準線に対する自車両の進行方向の角度偏差Δθに基づいてPID制御により自車両を転回させるアクチュエータaを制御するための横位置偏差に対応する第1制御量ic(X)および角度偏差に対応する第2制御量ic(θ)をそれぞれ算出する制御量算出手段4と、算出された当該第1制御量ic(X)および当該第2制御量ic(θ)に対して遅延処理を独立に施し、遅延させた第1制御量Ic(X)および第2制御量Ic(θ)をアクチュエータ制御装置Aに出力する遅延処理手段5とを備える。
(もっと読む)
緊急退避システム、緊急退避方法
【課題】運転者の意識レベルが低下した場合に車両を路肩等に退避させる緊急退避システムにおいて、緊急状態であることを外部から認識可能な緊急退避システム等を提供すること。
【解決手段】運転者の意識レベルの低下を検出して自車両を退避させる緊急退避システム100であって、運転者の状態を検出する運転者状態検出センサ21と、運転者の状態に基づき意識レベルが所定値以下に低下したか否かを判定する意識レベル判定手段41と、意識レベルが所定以下に低下したと判定された場合、自車両の前方の所定距離内に交差点があるか否かを判定する交差点有無判定手段42と、前方の所定距離内に交差点がある場合、交差点が通行可能な否かを判定する通行可否判定手段43と、交差点が通行可能な場合、交差点内に目標停止位置を決定する目標停止位置決定手段44と、目標停止位置に自車両を停止させる制動力制御手段44、45、32と、を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】ステアリングアクチュエータを小型化できる、車両制御装置を提供することである。
【解決手段】転舵角が最大になっているときに、運転者がさらに旋回力を与えようとしてステアリングホイール10をさらに回そうとすると、トルクセンサ40からECU120に与えられる操舵トルクが所定の値よりも大きくなる。このとき、ECU120は、デファレンシャル部150を制御して旋回方向の外側の車輪に与えられる駆動力が内側の車輪に与えられる駆動力よりも大きくなるように左右配分を行うと同時に、制動圧制御ユニット160を制御して旋回方向の内側の車輪に与えられる制動力が外側の車輪に与えられる制動力よりも大きくなるように左右配分を行う。
(もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
車両の走行制御装置及び車両の走行制御方法
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両の制御装置
【課題】運転状況に応じて適切に制駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】シフトレンジを切り換えることにより車両の制駆動力を制御する処理と、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定する処理とを実行するSBW−ECU4と、車両を加速させる加速操作を検出する加速操作検出手段22とを備え、SBW−ECU4が、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定し、かつ、加速操作検出手段22が加速操作を検出した場合に、SBW−ECU4が加速操作を誤操作であると判断して、シフトレンジをニュートラルレンジNおよびパーキングレンジPに切り換えることにより車両を減速させるよう制駆動力を制御するよう構成する。
(もっと読む)
車両の駆動力配分装置
【課題】駆動力の移動制御および制動力の制御とを並行して行なう期間において車輪の前後力の変化を滑らかにする。
【解決手段】車両の駆動力配分装置は、車速センサ162と、ヨーレートセンサ164と、操舵角センサ166と、ブレーキストロークセンサ168と、ブレーキアクチュエータ170と、油圧ポンプ180と、駆動トルクの移動制御および制動力の制御を実行するECU160と、油圧ポンプ18による駆動力の移動とブレーキアクチュエータ170による制動力の発生とが並行する期間において車両の前後方向における駆動力と制動力との和の変化率の符号が変化しないように左右の車輪34,36のそれぞれにおいて駆動力の変化と制動力の変化とを機械的に連動するための連動機構80,90とを含む。
(もっと読む)
181 - 200 / 618
[ Back to top ]