
車両制御装置、ナビゲーション装置、車両制御システム
【課題】燃費向上のために適切な制御を車両に対して行う。
【解決手段】ナビゲーション装置は、車両の走行道路に関する情報を取得し(ステップS410、S420およびS450)、取得した情報に基づいて、所定の判定条件を満たすか否かを判定することにより、車両の急加速を禁止すべきか否かを判定する(ステップS430、S440およびS460)。その結果、車両の急加速を禁止すべきと判定したときに、急加速禁止信号を出力する(ステップS470)ことで、車両の急加速を禁止するための制御を行う。
【解決手段】ナビゲーション装置は、車両の走行道路に関する情報を取得し(ステップS410、S420およびS450)、取得した情報に基づいて、所定の判定条件を満たすか否かを判定することにより、車両の急加速を禁止すべきか否かを判定する(ステップS430、S440およびS460)。その結果、車両の急加速を禁止すべきと判定したときに、急加速禁止信号を出力する(ステップS470)ことで、車両の急加速を禁止するための制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を制御する車両制御装置および車両制御システムと、車両を目的地に案内するナビゲーション装置とに関する。
【背景技術】
【0002】
従来、複数種類の燃費計測条件を選択的に設定し、設定された計測条件下での燃費の計測結果を表示することにより、運転者に対して車両の走行燃費を報知する装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2001−108503号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される従来の装置は、単に燃費計測結果を表示することで運転者に対して車両の走行燃費を報知するものである。したがって、燃費向上のために適切な制御を車両に対して行うことができない。
【課題を解決するための手段】
【0005】
請求項1の発明による車両制御装置は、車両の走行道路に関する情報を取得する情報取得手段と、情報取得手段により取得された情報に基づいて、車両の急加速を禁止すべきか否かを判定する判定手段と、判定手段により車両の急加速を禁止すべきと判定されたときに、車両の急加速を禁止するための制御を行う制御手段とを備えるものである。
請求項2の発明は、請求項1に記載の車両制御装置において、情報取得手段は、走行道路の交通情報を取得し、判定手段は、交通情報に基づいて車両の前方が渋滞しているか否かを判定し、渋滞していると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項3の発明は、請求項1または2に記載の車両制御装置において、情報取得手段は、走行道路の地図情報を取得し、判定手段は、地図情報に基づいて車両の前方に一時停止すべき交差点があるか否かを判定し、一時停止すべき交差点があると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項4の発明は、請求項1〜3のいずれか一項に記載の車両制御装置において、情報取得手段は、走行道路において車両の前方を走行している先行車両までの車間距離情報を取得し、判定手段は、車間距離情報に基づいて車両から先行車両までの車間距離が所定値以下であるか否かを判定し、所定値以下であると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項5の発明は、請求項1〜4のいずれか一項に記載の車両制御装置において、制御手段は、判定手段により車両の急加速を禁止すべきと判定されたときに、車両のエンジン回転数を制限するための制御を車両の変速機に対して行うものである。
請求項6の発明によるナビゲーション装置は、車両を設定された目的地まで案内するための制御を行うナビゲーション装置であって、車両の走行道路に関する情報として、走行道路の交通情報、走行道路の地図情報、および走行道路において車両の前方を走行している先行車両までの車間距離情報のいずれか少なくとも1つを取得する情報取得手段と、情報取得手段により取得された情報に基づいて、車両の前方が渋滞しているか否か、車両の前方に一時停止すべき交差点があるか否か、および車両から先行車両までの車間距離が所定値以下であるか否かのいずれか少なくとも1つを判定することにより、車両の急加速を禁止すべきか否かを判定する判定手段と、判定手段により車両の急加速を禁止すべきと判定されたときに、車両の急加速を禁止するための信号を出力する信号出力手段とを備えるものである。
請求項7の発明による車両制御システムは、請求項6に記載のナビゲーション装置と、信号出力手段により出力された信号に応じて、車両のエンジンを制御するエンジン制御装置とを備えるものである。
請求項8の発明は、請求項7に記載の車両制御システムにおいて、信号出力手段により出力された信号に応じて、車両の変速機を制御する変速機制御装置をさらに備えるものである。
【発明の効果】
【0006】
本発明によれば、燃費向上のために適切な制御を車両に対して行うことができる。
【発明を実施するための最良の形態】
【0007】
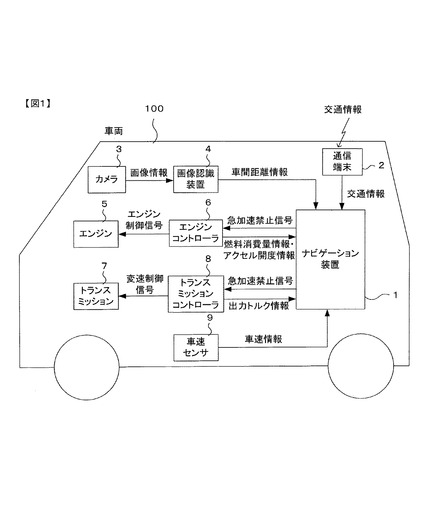
本発明の一実施形態による車載システムの構成を図1に示す。この車載システムは、車両100に搭載されており、ナビゲーション装置1、通信端末2、カメラ3、画像認識装置4、エンジン5、エンジンコントローラ6、トランスミッション7、トランスミッションコントローラ8および車速センサ9を有する。
【0008】
ナビゲーション装置1は、車両100を目的地まで案内するためのナビゲーション機能を有している。すなわちナビゲーション装置1は、地図データに基づいて地図を表示すると共に、車両100の位置すなわち自車位置を検出し、その自車位置を地図上に示す。ユーザの操作により目的地が設定されると、その目的地までの推奨経路を地図データに基づいて探索し、探索した推奨経路に従って車両100を目的地まで案内する。
【0009】
なお、推奨経路を探索する際、ユーザは、目的地までの予想所要時間や走行距離、通行料金などに応じて推奨経路を決定するいわゆる通常の経路探索、または、省燃費用の経路探索のいずれかを選択することができる。省燃費用の経路探索が選択された場合、ナビゲーション装置1は、出発地から目的地までの間に複数の候補経路を設定し、その各候補経路について、車両100が走行するときの走行燃費または燃料消費量をそれぞれ推定する。その結果、推定された走行燃費が一番良い候補経路、または推定された燃料消費量が一番少ない候補経路を、推奨経路に設定する。なお、走行燃費または燃料消費量の具体的な推定方法については、後で詳しく説明する。
【0010】
またナビゲーション装置1は、車両100の走行燃費をユーザに報知するための燃費報知機能を有している。すなわちナビゲーション装置1は、通信端末2、画像認識装置4、エンジンコントローラ6、トランスミッションコントローラ8および車速センサ9からそれぞれ出力される各種の情報に基づいて、車両100の走行燃費を算出する。そして、所定の報知条件を満たしたときに、算出した走行燃費を音声出力することでユーザに対して報知する。
【0011】
さらにナビゲーション装置1は、車両100の燃料消費を軽減するための車両制御機能をも有している。すなわちナビゲーション装置1は、車両100の急加速を禁止すべきか否かを判断し、急加速を禁止すべきと判断した場合は、エンジンコントローラ6およびトランスミッションコントローラ8に対して、車両100の急加速を禁止するための急加速禁止信号を出力する。この急加速禁止信号がナビゲーション装置1から出力されると、エンジンコントローラ6は、エンジン5の動作を制御するためのエンジン制御信号を所定の省燃費モードに従って出力する。また、トランスミッションコントローラ8は、トランスミッション7の変速動作を制御するための変速制御信号を所定の省燃費モードに従って出力する。その結果、エンジン5とトランスミッション7を通常走行時よりも燃料消費を軽減するように動作させることができる。したがって、車両100の走行燃費を向上させることができる。
【0012】
ナビゲーション装置1は、以上説明したような各種の機能を有している。すなわち、本発明の一実施形態による車載システムにおいては、ナビゲーション装置1により、候補経路における車両100の走行燃費または燃料消費量を推定する燃費推定装置や、目的地までの推奨経路を探索する経路探索装置、車両100が走行中のときの走行燃費を算出する燃費算出装置、算出した走行燃費を報知する燃費報知装置、車両100の燃料消費を軽減するための制御を行う車両制御装置などが実現される。
【0013】
通信端末2は、不図示の交通情報配信センターと無線通信により接続し、交通情報配信センターから送信される交通情報を受信して、ナビゲーション装置1へ出力する。通信端末2によって受信される交通情報には、たとえば、過去の交通情報を統計的に処理して得られた統計交通情報や、今後の交通状況を予測した予測交通情報、全国各地の車両から収集された情報に基づくプローブ交通情報などが含まれる。なお、通信端末2には、たとえば携帯電話などが用いられる。
【0014】
カメラ3は、車両100の前方が撮影方向となるように設置されており、撮影した画像情報を画像認識装置4へ出力する。画像認識装置4は、カメラ3からの画像情報に基づいて、車両100の前方を走行している車両(先行車両)を検出する。先行車両を検出した場合、画像認識装置4は、車両100からその先行車両までの車間距離を算出する。そして、算出した車間距離情報をナビゲーション装置1へ出力する。
【0015】
なお、ここではカメラ3と画像認識装置4を用いることとしたが、先行車両を検出して車間距離を算出することができれば、どのような装置を用いてもよい。たとえば、電波や光波などを前方に向けて送信し、先行車両からの反射波を検出することによって車間距離を求めるレーダ装置などを、カメラ3と画像認識装置4の代わりに用いてもよい。
【0016】
エンジン5は、エンジンコントローラ6から出力されるエンジン制御信号に基づいて動作し、車両100が走行するための駆動力を発生する。このとき、車両100に備えられたアクセルペダルの操作によって決定されたアクセル開度に応じて、エンジン5においてスロットルバルブの開閉状態が制御され、エンジン5が吸入する空気量が調節される。この吸入空気量の計測結果等に基づいて、エンジンコントローラ6はエンジン5における燃料噴射量を決定し、エンジン5の燃料噴射装置を制御する。さらにエンジンコントローラ6は、所定期間内でのエンジン5の燃料噴射量を合計することで車両100の燃料消費量を算出し、その算出結果を燃料消費量情報として、アクセル開度情報と共にナビゲーション装置1へ出力する。
【0017】
なお、エンジンコントローラ6は、ナビゲーション装置1から急加速禁止信号が出力されると、エンジン5の出力を制限して車両100が急加速しないように制御する。すなわち、アクセル開度が大きいときであっても、スロットルバルブをあまり開かず、燃料噴射量を抑えるようにエンジン5を制御する。これにより、車両100の燃料消費量を抑えて省燃費走行を実現する。
【0018】
トランスミッション7は、エンジン5によって発生された駆動力を所定の変速比により車両100へと伝える。トランスミッション7の変速比は、トランスミッションコントローラ8から出力される変速制御信号に応じて変化される。トランスミッションコントローラ8は、エンジン5の回転数や、運転者からの変速指示などに応じて、トランスミッション7の変速比を決定し、変速制御信号を出力する。さらにトランスミッションコントローラ8は、トランスミッション7によって車両100に伝えられた駆動力の大きさを示す出力トルクを検出し、その検出結果を示す出力トルク情報をナビゲーション装置1へ出力する。
【0019】
なお、トランスミッションコントローラ8は、ナビゲーション装置1から急加速禁止信号が出力されると、トランスミッション7を通常とは異なる省燃費モードで動作させるための変速制御信号を出力する。すなわち、通常よりも低いエンジン回転数で変速比を高段側(低変速比側)に変化させるようにトランスミッション7を制御して、エンジン5の回転数をなるべく上げないように制限する。このようにすることで、車両100の燃料消費量を抑えて省燃費走行を実現する。
【0020】
車速センサ9は、車両100の走行速度すなわち自車速度に応じた車速情報を、車速パルスなどによってナビゲーション装置1へ出力する。この車速情報に基づいて、ナビゲーション装置1において車両100の走行速度が検出される。
【0021】
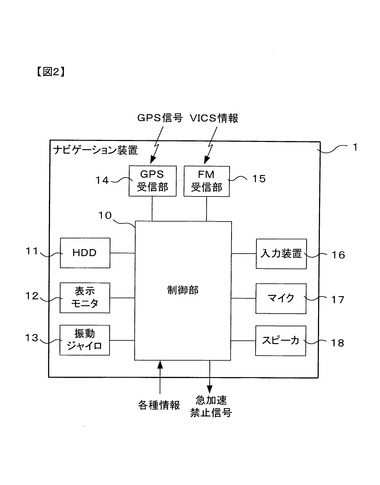
ナビゲーション装置1の構成を図2に示す。図2に示すように、ナビゲーション装置1は、制御部10、ハードディスク(HDD)11、表示モニタ12、振動ジャイロ13、GPS(Global Positioning System)受信部14、FM受信部15、入力装置16、マイク17およびスピーカ18を備えている。
【0022】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD11に記録されている制御プログラムや地図データに基づいて、前述したような各機能を実現するための各種の処理を実行する。このとき実行される処理の具体的な内容については、後でフローチャートを用いて説明する。
【0023】
なお、図1に示した各部からナビゲーション装置1に対して出力された各種の情報は、ナビゲーション装置1において所定の受信処理が行われた後、制御部10に入力される。すなわち、通信端末2からの交通情報、画像認識装置4からの車間距離情報、エンジンコントローラ6からの燃料消費量情報とアクセル開度情報、トランスミッションコントローラ8からの出力トルク情報、車速センサ9からの車速情報などが、制御部10に対して入力される。また、急加速を禁止すべき状況であると判断したときには、制御部10からエンジンコントローラ6およびトランスミッションコントローラ8に対して、前述のように急加速禁止信号が出力される。
【0024】
HDD11は不揮発性の記録媒体であり、地図データや後で説明する車両100の走行燃費履歴を含む各種のデータが記録されている。HDD11に記録されているデータは、必要に応じて制御部10の制御によりHDD11から読み出され、制御部10が実行する様々な処理や制御において利用される。
【0025】
なお、HDD11に記録された地図データには、経路計算データと、経路誘導データと、道路データと、背景データとが含まれている。経路計算データは、目的地までのルート探索に用いられる。経路誘導データは、設定された経路に従って自車両を目的地まで誘導するために用いられ、交差点名称や道路名称などを表す。道路データは、道路の形状や種別を表す。背景データは、河川や鉄道などの道路以外の地図形状や、各種施設の位置などを表す。なお、地図データにおいて各道路を表す最小単位はリンクと呼ばれている。すなわち、地図データにおいて各道路は複数のリンクによって構成されている。リンクとリンクの境界点はノードと呼ばれており、交差点などに対応している。
【0026】
表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。この表示モニタ12により地図が表示され、その地図上に自車位置が示される。なお、表示モニタ12は、たとえば車両100のダッシュボード上やインストルメントパネル内など、運転者であるユーザにとって運転席から見やすい位置に設置されている。
【0027】
振動ジャイロ13は、車両100の向きの変化に応じた角速度を検出するためのセンサである。この振動ジャイロ13により検出された角速度に基づいて、車両100の向きが求められる。GPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、車両100の位置と現在時刻を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて車両100の現在位置と現在時刻を算出することができる。
【0028】
FM受信部15は、FM放送により送信されるVICS情報を受信し、制御部10へ出力する。VICS情報とはVICS(Vehicle Information and Communication System)(登録商標)により提供される情報であり、高速道路や主要道路など特定の道路を対象とした交通情報などを含んでいる。なお、FM放送によるVICS情報に加えて、電波ビーコンや光波ビーコンから送信されるVICS情報をナビゲーション装置1において受信するようにしてもよい。
【0029】
入力装置16は、ナビゲーション装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0030】
なお、車両100の走行燃費を知りたい場合、ユーザは入力装置16に対して所定の報知要求操作を行うことにより、ナビゲーション装置1に対して車両100の走行燃費を算出させ、音声により報知させることができる。この報知要求操作は、様々な内容とすることができる。たとえば、所定のボタン操作やタッチパネル操作を報知要求操作に対応付けたり、あるいは音声認識を利用して、所定の音声を報知要求操作に対応付けたりすることができる。
【0031】
スピーカ18は、制御部10の制御により、車両100の走行に関する様々な音声情報を出力する。たとえば、推奨経路に従って自車両を目的地まで案内するための経路案内用の音声や、各種の警告音などを出力する。また、前述したように車両100の走行燃費を音声により出力する際にも、スピーカ18が用いられる。
【0032】
次に、ナビゲーション装置1の制御部10が実行する処理の内容について説明する。制御部10は、車両100がおかれている状況に応じて、燃費報知処理、経路探索処理および車両制御処理の各処理を実行することができる。
【0033】
燃費報知処理は、車両100の走行燃費を算出してユーザに報知する際に実行される処理である。この燃費報知処理が制御部10によって実行されることで、ユーザからの報知要求操作に応じた走行燃費の報知や、所定の報知条件を満たしたときの走行燃費の報知がナビゲーション装置1において行われる。これにより、前述したような燃費算出機能および燃費報知機能が実現される。
【0034】
経路探索処理は、目的地までの経路探索を行う際に実行される処理である。この経路探索処理が制御部10によって実行されることで、通常の経路探索または省燃費用の経路探索がナビゲーション装置1において行われる。これにより、前述したような燃費推定機能および経路探索機能がナビゲーション装置1において実現される。
【0035】
車両制御処理は、車両100の燃料消費を軽減するための制御を行う際に実行される処理である。この車両制御処理が制御部10によって実行されることで、車両100の急加速を禁止すべき状況であるか否かが判断され、急加速を禁止すべき状況のときには、ナビゲーション装置1からエンジンコントローラ6およびトランスミッションコントローラ8に対して急加速禁止信号が出力される。これにより、前述したような車両制御機能がナビゲーション装置1において実現される。
【0036】
まず、燃費報知処理の内容について説明する。図3は、制御部10において実行される燃費報知処理のフローチャートである。ステップS10において、制御部10は、入力装置16を用いてユーザから所定の報知要求操作が入力されたか否かを判定する。前述のような報知要求操作がユーザによって入力された場合はステップS20へ進み、報知要求操作が入力されない場合はステップS40へ進む。
【0037】
ステップS20において、制御部10は、車両100の瞬間走行燃費を算出する。ここでは、入力装置16に対してユーザから所定の報知要求操作が入力されたことがステップS10で検出された時点より所定時間前から、その報知要求操作の入力時点までの車両100の走行燃費を、瞬間走行燃費として算出する。この瞬間走行燃費を算出するために、制御部10は、エンジンコントローラ6から出力される燃料消費量情報と、車速センサ9から出力される車速情報とに基づいて、車両100の燃料消費量と走行距離の所定時間ごとの積算値をそれぞれ求め、最新の内容に随時更新する。報知要求操作の入力が検出されると、制御部10は、その時点で更新されている燃料消費量と走行距離の積算値に基づいて、瞬間走行燃費を算出する。
【0038】
ステップS30において、制御部10は、ステップS20で算出した瞬間走行燃費をスピーカ18から音声出力する。たとえば、「現在の走行燃費は○○km/リットルです」のような音声を出力して、瞬間走行燃費をユーザに報知する。こうして報知要求操作があった場合はそのときの瞬間走行燃費を報知して、ユーザの報知要求に応じるようにする。ステップS30を実行したら、ステップS170へ進む。
【0039】
なお、以上説明したステップS10〜S30では、報知要求操作の入力が検出されたときに瞬間走行燃費を算出することとしたが、瞬間走行燃費の算出を所定時間ごとに常時行うようにしてもよい。この場合、報知要求操作の入力を検出したら、その時点で算出されている最新の瞬間走行燃費をステップS30において音声出力すればよい。
【0040】
ステップS40において、制御部10は、エンジンコントローラ6から出力されるアクセル開度情報を受信することにより、車両100のアクセル開度を取得する。次のステップS50において、制御部10は、ステップS40で取得したアクセル開度に基づいて、車両100が急加速したか否かを判定する。すなわち、受信したアクセル開度情報によって示される車両100のアクセル開度が所定の大きさ以上となった場合は、車両100が急加速したと判定してステップS60へ進む。反対に、アクセル開度が所定の大きさ未満である場合は、車両100が急加速していないと判定してステップS80へ進む。
【0041】
ステップS60において、制御部10は、車両100が急加速中の走行燃費を算出する。ここでは、ステップS40で取得したアクセル開度に基づいて、車両100のアクセル開度が所定の大きさ以上である間の走行燃費を、急加速中の走行燃費として算出する。すなわち、アクセル開度が所定の大きさ以上である間にエンジンコントローラ6と車速センサ9からそれぞれ出力された燃料消費量情報および車速情報に基づいて、急加速中の燃料消費量と走行距離の積算値をそれぞれ求め、急加速中の走行燃費を算出する。
【0042】
ステップS70において、制御部10は、ステップS60で算出した急加速中の走行燃費をスピーカ18から音声出力する。たとえば、「今回の急加速の走行燃費は○○km/リットルです」のような音声を出力して、急加速中の走行燃費をユーザに報知する。こうして急加速中の走行燃費を報知することにより、急加速による走行燃費の悪化をユーザに認識させ、省燃費走行を心がけるように促す。ステップS70を実行したら、ステップS170へ進む。
【0043】
ステップS80において、制御部10は、HDD11に記録されている地図データのうち、車両100の走行地点付近の地図データを読み出して取得する。ステップS90において、制御部10は、車速センサ9から出力される車速情報に基づいて、車速すなわち車両100の走行速度を検出する。
【0044】
ステップS100において、制御部10は、ステップS80で取得した地図データと、ステップS90で検出した車速とに基づいて、車両100が高速道路を巡航しているか否かを判定する。ここでは、まずステップS80で取得した地図データに基づいて、車両100が高速道路を走行しているか否かを判断する。車両100が高速道路を走行していると判断した場合は、次にステップS90で検出した車速に基づいて、車両100がその高速道路を巡航しているか否かを判断する。車速が所定の速度範囲内である場合は、車両100が高速道路を巡航していると判断する。このときさらに、車速が所定の速度範囲内である走行区間が所定距離を超えたか否かを判定し、所定距離を超えたときに高速道路を巡航していると判断するようにしてもよい。このようにして、車両100が高速道路を巡航していると判定した場合は、ステップS110へ進む。一方、車両100が高速道路以外の道路を走行していると判断した場合や、車速が所定の速度範囲内にないため車両100が高速道路を巡航していないと判断した場合は、ステップS130へ進む。
【0045】
ステップS110において、制御部10は、車両100が高速道路を巡航中の走行燃費を算出する。ここでは、車両100が巡航中であると判断された高速道路の走行開始地点から現在の車両100の走行地点までの走行燃費を、高速道路巡航中の走行燃費として算出する。この高速道路巡航中の走行燃費を算出するために、制御部10は、車両100が高速道路の走行を開始すると、エンジンコントローラ6から出力される燃料消費量情報に基づいて、その時点からの車両100の燃料消費量の積算値を求めておく。車両100が高速道路を巡航中であると判定したら、制御部10は、その時点で求められている燃料消費量の積算値と、当該高速道路における車両100の走行開始地点から現在位置までの距離とに基づいて、高速道路巡航中の走行燃費を算出する。あるいは、巡航中の走行区間、すなわち車速が所定の速度範囲内である走行区間の走行燃費を、高速道路巡航中の走行燃費として算出してもよい。
【0046】
ステップS120において、制御部10は、ステップS110で算出した高速道路巡航中の走行燃費をスピーカ18から音声出力する。たとえば、「現在走行している高速道路の走行燃費は○○km/リットルです」のような音声を出力して、高速道路巡航中の走行燃費をユーザに報知する。こうして高速道路巡航中の走行燃費を報知することにより、走行燃費が改善したことをユーザに認識させ、省燃費走行を心がけるように促す。ステップS120を実行したら、ステップS170へ進む。
【0047】
なお、以上説明したステップS100〜S120では、車両100が高速道路を巡航していると判定したときに高速道路巡航中の走行燃費を算出することとしたが、車両100が高速道路の走行を開始した時点で、その高速道路における走行燃費を所定時間ごとに算出するようにしてもよい。この場合、車両100が高速道路を巡航していると判定したら、その時点で算出されている最新の走行燃費をステップS120において音声出力すればよい。
【0048】
ステップS130において、制御部10は、車両100の始動後の走行燃費を算出する。ここでは、車両100が始動してエンジン5が動作開始してから現在までの走行燃費を、車両始動後の走行燃費として算出する。この車両始動後の走行燃費を算出するために、車両100が始動してナビゲーション装置1の電源が投入されると、制御部10は、エンジンコントローラ6から出力される燃料消費量情報に基づいて、その時点からの車両100の燃料消費量の積算値を求めておく。この燃料消費量の積算値と、車両100の始動後から現在位置までの走行距離とに基づいて、車両始動後の走行燃費を算出する。
【0049】
ステップS140において、制御部10は、ステップS130で算出した車両始動後の走行燃費と、過去に算出された車両100の走行燃費履歴とを比較する。ここで比較対象とされる過去の走行燃費履歴は、後で説明するステップS170が実行されることによって過去にHDD11に記録されたものである。なお、HDD11には、過去の走行燃費履歴として、これまでに算出された車両始動後の走行燃費の最良値すなわち最も数値の高い走行燃費と、最悪値すなわち最も数値の低い走行燃費とを含む様々な走行燃費が記録されている。
【0050】
ステップS150において、制御部10は、ステップS140の比較結果に基づいて、今回算出した車両始動後の走行燃費がこれまでの最良値または最悪値を更新したか否かを判定する。最良値を更新した場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD11に記録された走行燃費の最良値よりも高い数値である場合、あるいは、最悪値を更新した場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD11に記録された走行燃費の最悪値よりも低い数値である場合は、ステップS160へ進む。一方、最良値と最悪値のいずれも更新していない場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD1
1に記録された走行燃費の最良値と最悪値の間にある場合は、ステップS170へ進む。
【0051】
ステップS160において、制御部10は、ステップS130で算出した車両始動後の走行燃費をスピーカ18から音声出力する。たとえば、最良値を更新した場合は、「今回の走行による走行燃費は○○km/リットルです。この調子で省エネ運転を続けて下さい。」のような音声を出力する。一方、最悪値を更新した場合は、「今回の走行による走行燃費は○○km/リットルです。もっと省エネ運転を心がけて下さい。」のような音声を出力する。これにより、現在の走行燃費がHDD11に記録された過去の走行燃費よりも高いまたは低いときに、その走行燃費をユーザに報知して省燃費走行を心がけるように促す。ステップS160を実行したら、ステップS170へ進む。
【0052】
ステップS170において、制御部10は、これまでの処理によって算出した走行燃費をHDD11に記録して走行燃費履歴を更新する。すなわち、今回算出した報知要求操作入力時の瞬間走行燃費、急加速中の走行燃費、高速道路巡航中の走行燃費、車両始動後の走行燃費などを、HDD11に記録された走行燃費履歴に新たに加える。なお、このとき上記で説明したような走行燃費以外にも、様々な走行燃費を算出してHDD11に走行燃費履歴として記録することが好ましい。たとえば、車両100の走行速度ごとに走行燃費を算出し、走行燃費履歴の一部としてHDD11に記録する。この走行速度ごとの走行燃費は、たとえば時速10kmごとに算出される。また、車両100が停止状態から発進するときの走行燃費を、走行燃費履歴の一部としてHDD11に記録する。ステップS170を実行したら、制御部10は図3のフローチャートを終了する。
【0053】
なお、上記のステップS170において更新される走行燃費履歴は、HDD11においてユーザ毎に記録されている。すなわち、ステップS170では、現在車両100を運転しているユーザに対して設定された走行燃費履歴のみを更新し、他のユーザに対して設定された走行燃費履歴は更新しないようにする。このようにするため、ナビゲーション装置1では、車両100の始動時などに予め所定のユーザ認識処理が行われる。たとえば、予め登録されたユーザIDをユーザに入力させたり、ユーザに固有の情報(たとえば、指紋、指や掌等の静脈、顔、虹彩、声紋など)を検出したりすることで、ユーザ認識処理が行われる。これ以外にもユーザ個人が特定できれば、どのような方法でユーザ認識処理を行ってもよい。
【0054】
以上説明したような燃費報知処理が制御部10において実行されることにより、ナビゲーション装置1は、ステップS10、S50、S100およびS150で説明したような様々な条件による判定を行う。この判定を行うことにより、車両100の走行燃費を報知すべきか否かを判定する。またナビゲーション装置1は、瞬間走行燃費、急加速中の走行燃費、高速道路巡航中の走行燃費および車両始動後の走行燃費のように、様々な種類の走行燃費を車両100について算出する。そして、上記の条件を満たすことで走行燃費を報知すべきと判定されたときに、算出した走行燃費を音声によりユーザに報知する。
【0055】
次に、経路探索処理の内容について説明する。図4は、制御部10において実行される経路探索処理のフローチャートである。ステップS210において、制御部10は、入力装置16を用いてユーザから入力された操作内容に応じて、車両100の目的地を設定する。
【0056】
ステップS220において、制御部10は、出発地すなわち現在の車両100の位置から、ステップS210で設定した目的地までの間に、複数の候補経路を探索する。ここでは、目的地までの予想所要時間や走行距離、通行料金などに基づいた通常の経路探索方法により、複数の候補経路を探索する。
【0057】
ステップS230において、制御部10は、ユーザが予め行った経路探索方法の選択結果に基づいて、省燃費用の経路探索を行うか否かを判定する。省燃費用の経路探索を行う場合はステップS240へ進む。一方、省燃費用の経路探索を行わない場合、すなわち通常の経路探索を行う場合は、ステップS340へ進む。
【0058】
ステップS240において、制御部10は、ステップS220で探索された複数の候補経路をそれぞれ対象道路に設定する。こうして設定された複数の対象道路に対して、以下で説明するような処理を制御部10が実行することにより、ナビゲーション装置1において省燃費用の経路探索が行われる。
【0059】
ステップS250において、制御部10は、ステップS240で設定した各対象道路についての対象道路情報を取得する。ここでは、各対象道路の道路状況に関する情報、たとえば、各対象道路の交差点情報、勾配情報、制限速度情報、交通情報などを、対象道路情報として取得する。
【0060】
上記の各情報のうち、交差点情報、勾配情報および制限速度情報は、HDD11に記録されている地図データに基づいて取得される。このうち交差点情報は、後で説明するステップS310において、対象道路の各交差点について車両100が停止する確率とその時間を推定するために用いられる情報である。たとえば、交差する道路の種別、信号の有無、車両100の進路(直進、右折、左折等)などを、対象道路情報の一部である交差点情報として地図データから取得する。また、勾配情報は、後で説明するステップS280とS290において車両100の燃料消費量を推定するために用いられる情報であり、対象道路の各地点における勾配を表している。制限速度情報は、後で説明するステップS260において車両100の走行速度を推定するために用いられる情報であり、対象道路の制限速度を表している。
【0061】
一方、対象道路情報のうち交通情報は、通信端末2によって受信されたものや、FM受信部15においてVICS情報として受信したものが用いられる。なお前述のように、通信端末2によって受信される交通情報には、統計交通情報、予測交通情報、プローブ交通情報などが含まれる。これらの様々な交通情報のうちいずれか少なくとも一つが、ステップS250において対象道路情報として取得される。
【0062】
以上説明したような各対象道路の道路状況に関する情報を対象道路情報として取得したら、次のステップS260において、制御部10は、各対象道路を車両100が走行する際の走行速度を推定する。ここでは、ステップS250で取得した対象道路情報のうち制限速度情報に基づいて、制限速度に応じた走行速度を推定する。なお、このとき推定される走行速度とは、車両100が発進時の加速や停止時の減速をしていないときの走行速度である。
【0063】
さらにステップS260では、ステップS250で取得した対象道路情報のうち交通情報に基づいて、各対象道路の渋滞状況や交通規制状況を判断し、走行速度の推定値に反映させるようにする。これにより、制限速度情報にのみ基づいて走行速度を推定する場合と比べて、より実際の走行時に近い走行速度を推定することができる。なお、対象道路の途中で制限速度や渋滞状況が変化する場合は、それに応じて、走行速度の推定値を対象道路内で変化させるようにする。
【0064】
ステップS270において、制御部10は、設定した各対象道路に対して、発進区間、走行区間および停止区間をそれぞれ設定する。発進区間とは、車両100が対象道路の交差点等で停止した場合に、その停止地点から発進して走行速度まで加速する区間である。走行区間とは、車両100が加速も減速もせず、ほぼ一定の走行速度により対象道路を走行する区間である。停止区間とは、車両100が対象道路の交差点等で停止する際に減速する区間である。
【0065】
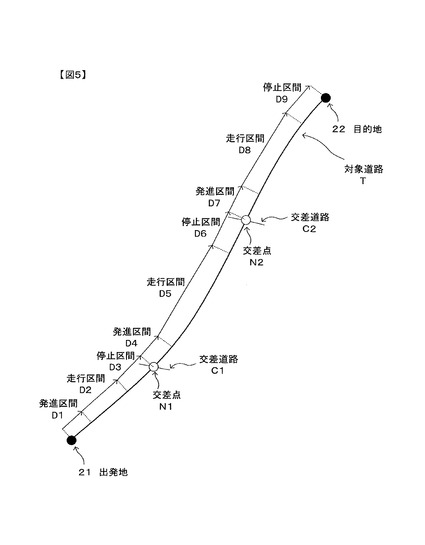
制御部10がステップS270で設定する各区間の例を図5に示す。この図では、出発地21から目的地21までの間に設定された対象道路Tについて、発進区間D1、D4およびD7と、走行区間D2、D5およびD8と、停止区間D3、D6およびD9とを設定した例を示している。対象道路Tには、出発地21と目的地22の間に、交差点N1およびN2が存在する。交差点N1では、交差道路C1が対象道路Tと交差しており、交差点N2では、交差道路C2が対象道路Tと交差している。
【0066】
発進区間D1には、車両100が出発地21での停止状態からステップS260で推定した走行速度に達するまでの区間、すなわち車両100が出発地21を発進してから加速する区間が設定される。このときの加速度すなわち車速の上昇度合いは、予めナビゲーション装置1において学習されたユーザの運転傾向に応じて決定される。たとえば、前述のようにHDD11にユーザ毎に記録された走行燃費履歴から、車両100が停止状態から発進するときの走行燃費の履歴を取得する。この発進時の走行燃費の履歴に基づいてユーザの運転傾向を判断し、その判断の結果に応じて発進時の加速度を決定する。すなわち、走行燃費履歴において記録された過去の発進時の走行燃費が悪い(低い)ユーザに対しては、発進時に急加速する傾向があるとして、発進時の加速度を大きく設定する。その結果、発進区間D1が通常よりも短く設定される。反対に、走行燃費履歴において記録された過去の発進時の走行燃費が良い(高い)ユーザに対しては、発進時にゆっくり加速する傾向があるとして、発進時の加速度を小さく設定する。その結果、発進区間D1が通常よりも長く設定される。
【0067】
一方、停止区間D3には、車両100がステップS260で推定した走行速度から減速し、交差点N1において停止するまでの区間が設定される。このときの減速度すなわち車速の減少度合いは、予め設定された値が用いられる。あるいは、予めナビゲーション装置1においてユーザのブレーキ操作の傾向を学習し、その学習結果に応じて減速度を変化させるようにしてもよい。
【0068】
なお、走行区間D2は、上記のようにして設定される発進区間D1と停止区間D3の間に設定される。
【0069】
以上説明したようにして、出発地21から交差点N1までの間に、発進区間D1、走行区間D2および停止区間D3が設定される。同様にして、交差点N1から交差点N2までの間に、発進区間D4、走行区間D5および停止区間D6が設定され、交差点N2から目的地22までの間に、発進区間D7、走行区間D8および停止区間D9が設定される。
【0070】
なお、図5では出発地21から目的地22までの間に設定された1本の対象道路Tについて説明したが、実際には複数の対象道路について、上記と同様の各区間(発進区間、走行区間、停止区間)がそれぞれ設定される。また、図5では出発地21から目的地22までの間に2つの交差点N1、N2を有する対象道路Tを例に説明したが、交差点の数はこれに限定されない。さらに、交差点以外の一時停止地点(たとえば、合流地点、料金所、踏切等)を含めてもよい。ただし、車両100が一時停止しない交差点、たとえば対象道路が優先道路である信号のない交差点や、立体交差点などは、除外することが好ましい。
【0071】
以上説明したような各区間を各対象道路に対してそれぞれ設定したら、次のステップS280において、制御部10は、発進区間における車両100の燃料消費量を推定する。ここでは、各発進区間の前にある交差点(または出発地)で車両100が停止した場合の燃料消費量(停止時の燃料消費量)と、その交差点で車両100が停止しない場合の燃料消費量(通過時の燃料消費量)とを、各発進区間について推定する。
【0072】
発進区間における停止時の燃料消費量を推定する際には、予めHDD11においてユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の発進時の走行燃費の履歴、すなわち車両100が停止状態から発進するときに算出されて記録された走行燃費の履歴を取得する。この発進時の走行燃費の履歴と、ステップS270で設定した各発進区間の距離とに基づいて、各発進区間における停止時の燃料消費量を各対象道路についてそれぞれ推定する。
【0073】
一方、発進区間における通過時の燃料消費量を推定する際には、まず、各発進区間における通過時の走行速度の推定値を求める。ここでは、前述のステップS260において推定された走行速度のうち、各発進区間に対応する範囲での走行速度をそれぞれ求めることにより、各発進区間における通過時の走行速度の推定値を求める。次に、予めHDD11にユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。この走行速度ごとの走行燃費の履歴に基づいて、上記の通過時の走行速度の推定値に対応する走行燃費を特定する。こうして特定した走行燃費と、各発進区間の距離とに基づいて、各発進区間における通過時の燃料消費量を各対象道路についてそれぞれ推定する。
【0074】
以上説明したようなステップS280の処理が実行されることにより、図5の例において、発進区間D1、D4、D7について停止時および通過時の燃料消費量がそれぞれ推定される。
【0075】
ステップS290において、制御部10は、走行区間における車両100の燃料消費量を推定する。ここでは、上記ステップS280で各発進区間について通過時の燃料消費量を推定したのと同様の方法により、各走行区間について燃料消費量をそれぞれ推定する。すなわち、ステップS260で推定された対象道路の走行速度に基づいて、各走行区間における通過時の走行速度の推定値を求めると共に、予めHDD11にユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。この走行速度ごとの走行燃費の履歴に基づいて、各走行区間における走行速度の推定値に対応する走行燃費を特定する。こうして特定した走行燃費と、各走行区間の距離とに基づいて、各走行区間における燃料消費量を各対象道路についてそれぞれ推定する。
【0076】
以上説明したようなステップS290の処理が実行されることにより、図5の例において走行区間D2、D5、D8の燃料消費量がそれぞれ推定される。
【0077】
なお、ステップS280で発進区間の燃料消費量を推定する際や、ステップS290で走行区間の燃料消費量を推定する際には、車両100の重量や対象道路の勾配を考慮することが好ましい。車両100の重量は、予め設定された値を用いてもよい。あるいは、車両100の走行中に車速センサ9とトランスミッションコントローラ8からそれぞれ出力される車速情報と出力トルク情報を取得し、これらに基づいて車両100の重量を推定してもよい。すなわち、車速情報と出力トルク情報から、出力トルクに対する車両100の車速の変化量を求め、これに基づいて車両100の重量を推定する。このとき、HDD11に記録された地図データから走行中の道路勾配の情報を取得して、推定結果に反映させても良い。こうして推定された車両100の重量と、ステップS250で対象道路情報の一部として取得した対象道路の勾配情報とに基づいて、発進区間および走行区間の燃料消費量を推定することができる。すなわち、車両100の重量が重いほど、また対象道路の勾配が大きいほど、燃料消費量の推定値を大きくする。
【0078】
ステップS300において、制御部10は、停止区間における車両100の燃料消費量を推定する。ここでは、ステップS280の処理と同様に、停止時の燃料消費量、すなわち各停止区間の後にある交差点(または目的地)で車両100が停止した場合の燃料消費量と、通過時の燃料消費量、すなわち当該交差点で車両100が停止しない場合の燃料消費量とを、各停止区間について推定する。
【0079】
停止区間における停止時の燃料消費量は、ステップS270で設定した各停止区間の距離に応じて所定の燃料消費量を設定することで推定される。一方、停止区間における通過時の燃料消費量は、ステップS280と同様の方法により推定される。すなわち、ステップS260で推定された対象道路の走行速度に基づいて、各停止区間における通過時の走行速度を推定する。この通過時の走行速度の推定値に対応する走行燃費を、当該ユーザに対する走行燃費履歴の一部としてHDD11に記録された走行速度ごとの走行燃費の履歴に基づいて特定する。こうして特定した走行燃費と、各停止区間の距離とに基づいて、各停止区間における通過時の燃料消費量を各対象道路についてそれぞれ推定する。なお、ここで推定される燃料消費量には、交差点で停止している間の燃料消費量は含まれない。
【0080】
以上説明したようなステップS300の処理が実行されることにより、図5の例において、停止区間D3、D6、D9について停止時および通過時の燃料消費量がそれぞれ推定される。
【0081】
ステップS310において、制御部10は、対象道路の各交差点において車両100が停止する停止確率と、その停止時間とを推定する。ここでは、ステップS250で取得した対象道路情報のうち交差点情報に基づいて、各交差点の停止確率と停止時間を各対象道路についてそれぞれ推定する。たとえば、対象道路よりも交差する道路の種別が高く交通量が多いと考えられる場合や、信号がある場合は、停止確率と停止時間の推定値を比較的高く設定する。さらに、右折または左折する場合は、直進時よりも高い推定値とする。反対に、対象道路よりも交差する道路の種別が低く交通量が少ないと考えられる場合や、信号がない場合には、停止確率の推定値を比較的低く設定する。このとき、交通情報を加味して推定値を変化させてもよい。あるいは、各交差点に対する停止確率と停止時間の統計的な情報をHDD11に記録しておき、これを取得することで、停止確率と停止時間を推定するようにしてもよい。
【0082】
ステップS320において、制御部10は、ステップS310で推定した各交差点での停止時間に基づいて、対象道路の交差点における停止中の燃料消費量、すなわち交差点において車両100が停止している間のアイドリング中の燃料消費量を推定する。ここでは、各交差点について推定した停止時間に、所定のアイドリング燃費(車両100がアイドリング中に消費する単位時間当たりの燃料量)を乗算することで、各交差点における停止中の燃料消費量を各対象道路についてそれぞれ推定する。ステップS320が実行されることにより、図5の例において交差点N1、N2に対する停止中の燃料消費量がそれぞれ推定される。
【0083】
ステップS330において、制御部10は、車両100が対象道路の各交差点を通る際の燃料消費量をそれぞれ推定する。ここでは、対象道路の各交差点に対して、まず、停止時の燃料消費量、すなわち当該交差点で車両100が停止する場合の燃料消費量の推定値と、通過時の燃料消費量、すなわち当該交差点で車両100が停止しない場合の燃料消費量の推定値とを、各対象道路についてそれぞれ求める。
【0084】
上記の2つの推定値のうち停止時の燃料消費量の推定値は、当該交差点の前に位置する停止区間に対してステップS300で推定した停止時の燃料消費量と、当該交差点に対してステップS320で推定した停止中の燃料消費量と、当該交差点の次に位置する発進区間に対してステップS280で推定した停止時の燃料消費量とを合計することにより、求められる。一方、通過時の燃料消費量の推定値は、当該交差点の前に位置する停止区間に対してステップS300で推定した通過時の燃料消費量と、当該交差点の次に位置する発進区間に対してステップS280で推定した通過時の燃料消費量とを合計することにより、求められる。
【0085】
上記のようにして停止時の燃料消費量の推定値と通過時の燃料消費量の推定値とを求めたら、次に制御部10は、これらの燃料消費量の推定値を、ステップS310で推定した停止確率に基づいて重み付けする。すなわち、停止確率が高い交差点ほど、停止時の燃料消費量の重み付けを高くする一方で、通過時の燃料消費量の重み付けを低くして、これらの燃料消費量の推定値を合計する。反対に、停止確率が低い交差点ほど、停止時の燃料消費量の重み付けを低くする一方で、通過時の燃料消費量の重み付けを高くして、これらの燃料消費量の推定値を合計する。このような処理を各対象道路について交差点ごとに行うことで、各交差点を通る際の燃料消費量をそれぞれ推定する。
【0086】
以上説明したステップS270〜S330の処理が制御部10において実行されることにより、ステップS250で対象道路情報として取得された交差点情報に基づいて、対象道路の各交差点を車両100が通る際の燃料消費量がそれぞれ推定される。こうして交差点を通る際の燃料消費量を推定したら、次のステップS340において、制御部10は、対象道路を車両100が走行する場合の燃料消費量を推定する。ここでは、ステップS330で各交差点に対して求めた通過時の燃料消費量の推定値と、各走行区間における燃料消費量の推定値とを、各対象道路について出発地から目的地までそれぞれ合計する。これにより、各対象道路を走行する場合の燃料消費量をそれぞれ推定する。
【0087】
たとえば図5の例において、交差点N1、N2における停止確率がそれぞれP1、P2であり、停止中の燃料消費量の推定値がそれぞれEs(N1)、Es(N2)であるとする。また、発進区間D1、D4、D7における停止時の燃料消費量の推定値が、それぞれEs(D1)、Es(D4)、Es(D7)であり、発進区間D4、D7における通過時の燃料消費量の推定値が、それぞれEt(D4)、Et(D7)であるとする。さらに、走行区間D2、D5、D8における燃料消費量の推定値が、それぞれEt(D2)、Et(D5)、Et(D8)であるとする。加えて、停止区間D3、D6、D9における停止時の燃料消費量の推定値が、それぞれEs(D3)、Es(D6)、Es(D9)であり、停止区間D3、D6における通過時の燃料消費量の推定値が、それぞれEt(D3)、Et(D6)であるとする。なお、出発地21からの発進区間D1の前と、目的地22へ至る停止区間D9の後では、必ず車両100が停止する。したがって、これらについては通過時の燃料消費量は推定されない。
【0088】
このとき、車両100が対象道路Tを走行する場合の燃料消費量の推定値E(T)は、次の式(1)により求められる。
E(T)=Es(D1)+Et(D2)
+P1・{Es(D3)+Es(N1)+Es(D4)}
+(1−P1)・{Et(D3)+Et(D4)}
+Et(D5)
+P2・{Es(D6)+Es(N2)+Es(D7)}
+(1−P2)・{Et(D6)+Et(D7)}
+Et(D8)+Es(D9) ・・・(1)
【0089】
なお、上記の式(1)において、P1・{Es(D3)+Es(N1)+Es(D4)}+(1−P1)・{Et(D3)+Et(D4)}の部分は、車両100が交差点N1を通過する際の燃料消費量の推定値を表している。また、P2・{Es(D6)+Es(N2)+Es(D7)}+(1−P2)・{Et(D6)+Et(D7)}の部分は、車両100が交差点N2を通過する際の燃料消費量の推定値を表している。これらの交差点通過時の燃料消費量の推定値は、ステップS330において求められたものである。
【0090】
省燃費用の経路探索を行う際には、以上説明したようなステップS240〜S340の処理が実行される。これにより、ステップS220で探索した複数の経路がそれぞれ対象道路に設定され、その各対象道路に対して、車両100が走行する場合の燃料消費量が推定される。
【0091】
ステップS350において、制御部10は、ステップS220で探索した複数の候補経路の中からいずれかを目的地までの推奨経路として選択する。ここでは、省燃費用の経路探索を行うとステップS230において判定し、ステップS240〜S340の処理を実行することによって各対象道路を車両100が走行する場合の燃料消費量を推定した場合には、その各対象道路に対する燃料消費量の推定値に基づいて、最も燃料消費量が少ない対象道路を推奨経路として選択する。一方、省燃費用の経路探索を行わないとステップS230において判定した場合には、目的地までの予想所要時間などに基づいて、ステップS220で探索した複数の候補経路のいずれかを推奨経路として選択する。ステップS350を実行したら、制御部10は図4のフローチャートを終了する。
【0092】
以上説明したような経路探索処理が制御部10において実行されることにより、ナビゲーション装置1は、複数の候補経路を探索して対象道路に設定し、その対象道路に関する情報を取得して、車両100が対象道路を走行する場合の燃料消費量を推定する。そして、算出した燃料消費量に基づいて、対象道路に設定された候補経路のいずれかを推奨経路に設定する。
【0093】
なお、上記の経路探索処理では車両100が対象道路を走行する場合の燃料消費量を推定することとしたが、燃料消費量に代えて走行燃費を推定することとしてもよい。すなわち、各対象道路の距離に基づいて、ステップS340で求めた各対象道路の燃料消費量の推定値を走行燃費の推定値にそれぞれ換算してもよい。このようにした場合でも、換算した各対象道路の走行燃費の推定値に基づいて、対象道路のいずれかを目的地までの推奨経路として選択することができる。
【0094】
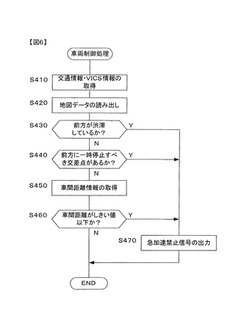
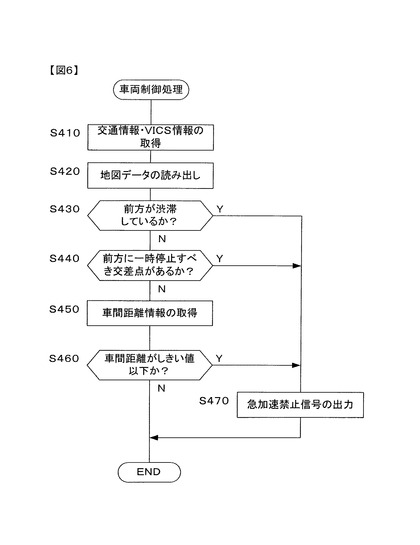
次に、車両制御処理の内容について説明する。図6は、制御部10において実行される車両制御処理のフローチャートである。ステップS410において、制御部10は、通信端末2において受信された交通情報と、FM受信部15において受信されたVICS情報とを取得する。このとき、交通情報とVICS情報の取得対象とする道路範囲の中に、車両100の走行道路が少なくとも含まれているものとする。なお、交通情報とVICS情報のいずれか一方のみを取得してもよい。次のステップS420において、制御部10は、車両100の走行道路を少なくとも含む所定の地図範囲の地図データをHDD11から読み出す。
【0095】
ステップS430において、制御部10は、ステップS410で取得した交通情報またはVICS情報と、ステップS420で読み出した地図データとに基づいて、車両100の前方が渋滞しているか否かを判定する。すなわち、交通情報やVICS情報に表されている渋滞情報と地図データに基づいて、道路上で渋滞している地点を特定する。こうして特定された渋滞地点のいずれかが、車両100が走行中の道路の前方において存在するか否かを判定する。その結果、前方が渋滞していると判定した場合はステップS470へ進み、渋滞していないと判定した場合はステップS440へ進む。
【0096】
ステップS440において、制御部10は、車両100の前方に一時停止すべき交差点があるか否かを、ステップS420で読み出した地図データに基づいて判定する。前方に一時停止すべき交差点があると判定した場合はステップS470へ進み、ないと判定した場合はステップS450へ進む。なお、ここで判定対象とされる一時停止すべき交差点とは、図4の経路探索処理において説明した停止区間と発進区間の境界点に相当する交差点である。したがって、交差点以外の一時停止地点(合流地点、料金所、踏切等)を判定対象に含めてもよい。
【0097】
ステップS450において、制御部10は、画像認識装置4から出力される車間距離情報を取得する。この車間距離情報は、現在の車両100の走行道路における先行車両までの車間距離を表している。なお、先行車両は、前述のようにカメラ3によって車両100の前方を撮影して得られた画像情報に基づいて、画像認識装置4により検出される。こうして検出された先行車両までの車間距離が画像認識装置4において算出され、車間距離情報として制御部10へ出力される。
【0098】
ステップS460において、制御部10は、ステップS450で取得した車間距離情報に基づいて、車両100から先行車両までの車間距離が所定のしきい値以下であるか否かを判定する。車間距離がしきい値以下である場合はステップS470へ進み、しきい値未満である場合は図6のフローチャートを終了する。なお、ステップS460の判定に用いるしきい値には、車両100において急加速する必要がない車間距離、たとえば100mなどの値が予め設定される。
【0099】
ステップS470において、制御部10は、エンジンコントローラ6およびトランスミッションコントローラ8に対して、急加速禁止信号を出力する。すなわち、ステップS430において車両100の前方が渋滞していると判定した場合、ステップS440において車両100の前方に一時停止すべき交差点があると判定した場合、または、ステップS460において車両100から先行車両までの車間距離が所定値以下であると判定した場合には、制御部10の制御により、ナビゲーション装置1からエンジンコントローラ6およびトランスミッションコントローラ8に対して急加速禁止信号が出力される。ステップS470を実行したら、制御部10は図6のフローチャートを終了する。
【0100】
上記のステップS470が実行されることにより、ナビゲーション装置1から急加速禁止信号が出力されると、エンジンコントローラ6は、前述のようにエンジン5の出力を制限して車両100が急加速しないように制御する。また、トランスミッションコントローラ8は、前述のようにトランスミッション7を通常とは異なる省燃費モードで動作させるための変速制御信号を出力する。これにより、ナビゲーション装置1は車両100の急加速を禁止するための制御を行う。その結果、車両100の燃料消費量を抑えて省燃費走行を実現することができる。
【0101】
以上説明したような車両制御処理が制御部10において実行されることにより、ナビゲーション装置1は、車両100の走行道路に関する情報として、車両100の走行道路についての交通情報やVICS情報、地図データ、車間距離情報を取得する。これらの情報に基づいて、ステップS430、S440およびS460でそれぞれ説明したような所定の判定条件を満たすか否かを判定することで、車両100の急加速を禁止すべきか否かの判定を行う。そして、禁止すべきと判定したときには、車両100の急加速を禁止するための急加速禁止信号を出力する。
【0102】
以上説明した実施の形態によれば、次の作用効果を奏する。
(1)ナビゲーション装置1は、制御部10の処理により、様々な条件による判定を行う(ステップS10、S50、S100およびS150)ことで、車両100の走行燃費を報知すべきか否かを判定する。また、ナビゲーション装置1は、制御部10の処理により、様々な種類の車両100の走行燃費を算出する(ステップS20、S60、S110およびS130)。そして、走行燃費を報知すべきと判定したときに、算出した走行燃費を音声により報知する(ステップS30、S70、S120およびS160)こととした。このようにしたので、適切なタイミングと方法で車両100の走行燃費を報知することができる。
【0103】
(2)制御部10は、ステップS10において、入力装置16に対してユーザから所定の報知要求操作が入力されたときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS20を実行して、入力装置16に対して報知要求操作が入力された時点より所定時間前からその報知要求操作の入力時点までの瞬間走行燃費を算出する。こうして算出した瞬間走行燃費をステップS30において音声出力することとしたので、ユーザの報知要求に応じて効果的に燃費情報の報知を行うことができる。
【0104】
(3)制御部10は、車両100のアクセル開度を取得する(ステップS40)。ステップS50では、このアクセル開度に基づいて、車両100が急加速したか否かを判断し、急加速したと判断したときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS60を実行して、アクセル開度が所定の大きさ以上である間の走行燃費を急加速中の走行燃費として算出する。こうして算出した急加速中の走行燃費をステップS70において音声出力することとしたので、急加速したときに効果的に燃費情報の報知を行うことができる。その結果、急加速による走行燃費の悪化をユーザに認識させ、省燃費走行を心がけるように促すことができる。
【0105】
(4)制御部10は、車両100の走行地点付近の地図データをHDD11から読み出して取得する(ステップS80)と共に、車両100の走行速度を検出する(ステップS90)。ステップS100では、ステップS80で取得した地図データに基づいて車両100が高速道路を走行しているか否かを判断し、高速道路を走行していると判断した場合には、ステップS90で検出した走行速度に基づいて、車両100が高速道路を巡航しているか否かを判断する。こうして車両100が高速道路を巡航していると判断したときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS110を実行して、車両100が巡航していると判断された高速道路の走行開始地点から現在の車両100の走行地点までの走行燃費を、高速道路巡航中の走行燃費として算出する。こうして算出した高速道路巡航中の走行燃費をステップS120において音声出力することとしたので、高速道路巡航中に効果的に燃費情報の報知を行うことができる。その結果、走行燃費が改善したことをユーザに認識させ、省燃費走行を心がけるように促すことができる。
【0106】
(5)制御部10は、ステップS130において、車両始動後の走行燃費として車両100が始動してから現在までの走行燃費を算出する。この車両始動後の走行燃費と、ステップS170において過去にHDD11に記録された走行燃費履歴とを比較する(ステップS140)。ステップS150では、ステップS140の比較結果に基づいて、ステップS130で算出された車両始動後の走行燃費が、過去にHDD11に記録された走行燃費履歴の最良値よりも高い、または最悪値よりも低いときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS130で算出した車両始動後の走行燃費をステップS160において音声出力することとしたので、現在の走行燃費がHDD11に記録された過去の走行燃費よりも高いまたは低いときに、効果的にその走行燃費をユーザに報知して、省燃費走行を心がけるように促すことができる。
【0107】
(6)ナビゲーション装置1は、制御部10により、ステップS20、S60またはS110のいずれか少なくとも一つを実行することで、ユーザから所定の報知要求操作が入力された時点より所定時間前からその報知要求操作の入力時点までに車両100が走行した道路区間、車両100が加速中に走行した道路区間、または車両100が走行した高速道路区間のいずれか少なくとも一つについて、走行燃費を算出することができる。このようにしたので、様々な種類の走行燃費を状況に応じて算出することができる。
【0108】
(7)ナビゲーション装置1は、制御部10の処理により、対象道路に関する対象道路情報を取得し(ステップS250)、その対象道路情報に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する(ステップS260〜S340)こととした。このようにしたので、車両100が実際に走行していない道路について、走行燃費や燃料消費量を推定することができる。
【0109】
(8)制御部10は、ステップS250において、対象道路の各交差点についての交差点情報を対象道路情報として取得する。この交差点情報に基づいて、対象道路の各交差点を車両100が通る際の燃料消費量をそれぞれ推定し(ステップS270〜S330)、推定した燃料消費量に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量をステップS340で推定することとした。このようにしたので、車両100が実際に走行していない道路の走行燃費や燃料消費量を正確に推定することができる。
【0110】
(9)制御部10は、ステップS250で取得した交差点情報に基づいて、対象道路の各交差点における停止確率を推定する(ステップS310)。ステップS330では、こうして推定した停止確率に基づいて、対象道路の各交差点における停止時の燃料消費量の推定値と通過時の燃料消費量の推定値とを重み付けすることにより、対象道路の各交差点を車両100が通る際の燃料消費量をそれぞれ推定する。このようにしたので、対象道路の各交差点を車両100が通る際の燃料消費量を、車両100が当該交差点で停止する確率に応じて正確に推定することができる。したがって、より正確に走行燃費や燃料消費量の推定を行うことができる。
【0111】
(10)制御部10は、ステップS250において、対象道路の交通情報、すなわち統計交通情報、予測交通情報、およびプローブ交通情報のいずれか少なくとも1つを、対象道路情報として取得する。ステップS340では、この交通情報に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。すなわち、取得した交通情報に基づいて、各対象道路の渋滞状況や交通規制状況を判断し、その判断結果を反映して車両100の走行速度を推定する(ステップS260)。この走行速度の推定値に基づいて、発進区間、走行区間および停止区間の燃料消費量をそれぞれ推定し(ステップS280〜S300)、推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することとした。このようにしたので、より実際の走行時に近い走行速度を推定して、走行燃費や燃料消費量の推定に反映させることができる。
【0112】
(11)制御部10は、ステップS250で取得した対象道路情報と共に、ユーザの運転傾向に関する情報をステップS280、S290およびS300において取得する。ステップS340では、この対象道路情報とユーザの運転傾向に関する情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。すなわち、ステップS280〜S300では、ユーザの運転傾向に関する情報として、ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。そして、ステップS260で推定した対象道路における車両100の推定走行速度と、取得した走行速度ごとの走行燃費の履歴とに基づいて、各区間の燃料消費量を推定する。こうして推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。また、ステップS280では、ユーザの運転傾向に関する情報として、ユーザが車両100を運転した際の発進時の走行燃費の履歴を取得する。そして、取得した発進時の走行燃費の履歴に基づいて、発進区間の燃料消費量を推定する。こうして推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。このようにしたので、ユーザの運転傾向を反映して、より正確に走行燃費や燃料消費量の推定を行うことができる。
【0113】
(12)また制御部10は、ステップS250で取得した対象道路情報と共に、車両100に関する情報をステップS280およびS290において取得することができる。ステップS340では、この対象道路情報と車両100に関する情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。すなわち、ステップS280、S290では、車両100に関する情報として、車両100の速度情報と、車両100の出力トルク情報とを取得する。この速度情報および出力トルク情報に基づいて車両100の重量を推定し、推定した車両100の重量に基づいて、発進区間および走行区間の燃料消費量を推定することができる。こうして推定した発進区間および走行区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。このようにすれば、車両100の重量を反映して、より一層正確に走行燃費や燃料消費量の推定を行うことができる。
【0114】
(13)さらに制御部10は、ステップS250において、対象道路の勾配情報を対象道路情報として取得し、ステップS340において、車両100の重量と取得した勾配情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。すなわち、ステップS280、S290において、車両100の重量と勾配情報に基づいて、発進区間および走行区間の燃料消費量を推定することができる。こうして推定した発進区間および走行区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。このようにすれば、対象道路の勾配を反映して、さらに一層正確に走行燃費や燃料消費量の推定を行うことができる。
【0115】
(14)ナビゲーション装置1は、制御部10の処理により、目的地を設定し(ステップS210)、その目的地までの複数の経路を探索する(ステップS220)。この複数の経路を対象道路に設定して(ステップS240)、ステップS250〜S340の処理により、車両100が走行する場合の走行燃費または燃料消費量をそれぞれ推定する。こうして推定された走行燃費または燃料消費量に基づいて、対象道路に設定された経路のいずれかを目的地までの推奨経路として選択する(ステップS350)こととした。このようにしたので、推定された走行燃費が一番良い候補経路、または推定された燃料消費量が一番少ない候補経路を推奨経路に設定して、省燃費用の経路探索を行うことができる。
【0116】
(15)ナビゲーション装置1は、制御部10の処理により、車両100の走行道路に関する情報を取得し(ステップS410、S420およびS450)、取得した情報に基づいて、所定の判定条件を満たすか否かを判定することにより、車両100の急加速を禁止すべきか否かを判定する(ステップS430、S440およびS460)。その結果、車両100の急加速を禁止すべきと判定したときに、急加速禁止信号を出力する(ステップS470)ことで、車両100の急加速を禁止するための制御を行うこととした。このようにしたので、燃費向上のために適切な制御を車両100に対して行うことができる。
【0117】
(16)制御部10は、車両100の走行道路の交通情報を取得し(ステップS410)、取得した交通情報に基づいて車両100の前方が渋滞しているか否かを判定する(ステップS430)。その結果、渋滞していると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100の前方が渋滞しているときに、不要な急加速を禁止するように車両100を制御することができる。
【0118】
(17)また、制御部10は、車両100の走行道路の地図情報を取得し(ステップS420)、取得した地図情報に基づいて車両100の前方に一時停止すべき交差点があるか否かを判定する(ステップS440)。その結果、一時停止すべき交差点があると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100の前方に一時停止すべき交差点があるときに、不要な急加速を禁止するように車両100を制御することができる。
【0119】
(18)さらに、制御部10は、車両100の走行道路において車両100の前方を走行している先行車両までの車間距離情報を取得し(ステップS450)、取得した車間距離情報に基づいて車両100から先行車両までの車間距離が所定値以下であるか否かを判定する(ステップS460)。その結果、所定値以下であると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100から先行車両までの車間距離が所定値以下であるときに、不要な急加速を禁止するように車両100を制御することができる。
【0120】
(19)制御部10は、ステップS430、S440またはS460のいずれかの判定によって車両100の急加速を禁止すべきと判定されたときに、ステップS470の処理を実行して急加速禁止信号をトランスミッションコントローラ8へ出力する。この急加速禁止信号に応じて、トランスミッションコントローラ8は、トランスミッション7を省燃費モードで動作させるための変速制御信号をランスミッション7へ出力することで、通常よりも低いエンジン回転数で変速比を高段側に変化させるようにトランスミッション7を制御し、エンジン5の回転数をなるべく上げないように制限する。このようにして、制御部10により、車両100のエンジン5の回転数を制限するための制御を車両100のトランスミッション7に対して行うこととしたので、車両100の燃料消費量をさらに抑えて省燃費走行を実現することができる。
【0121】
なお、以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【0122】
以上説明した実施の形態では、特許請求の範囲に記載された各手段を制御部10が実行する処理によってそれぞれ実現することとした。すなわち、制御部10は、情報取得手段、判定手段、制御手段および信号出力手段として機能する。なお、以上の説明はあくまで一例であり、発明を解釈する際、実施の形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0123】
【図1】本発明の一実施形態による車載システムの構成を示す図である。
【図2】ナビゲーション装置の構成を示す図である。
【図3】燃費報知処理のフローチャートである。
【図4】経路探索処理のフローチャートである。
【図5】発進区間、走行区間および停止区間の設定例を示す図である。
【図6】車両制御処理のフローチャートである。
【符号の説明】
【0124】
1:ナビゲーション装置、2:通信端末、3:カメラ、4:画像認識装置、
5:エンジン、6:エンジンコントローラ、7:トランスミッション、
8:トランスミッションコントローラ、9:車速センサ、
10:制御部、11:HDD、12:表示モニタ、13:振動ジャイロ、
14:GPS受信部、15:FM受信部、16:入力装置、
17:マイク、18:スピーカ、100:車両
【技術分野】
【0001】
本発明は、車両を制御する車両制御装置および車両制御システムと、車両を目的地に案内するナビゲーション装置とに関する。
【背景技術】
【0002】
従来、複数種類の燃費計測条件を選択的に設定し、設定された計測条件下での燃費の計測結果を表示することにより、運転者に対して車両の走行燃費を報知する装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2001−108503号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される従来の装置は、単に燃費計測結果を表示することで運転者に対して車両の走行燃費を報知するものである。したがって、燃費向上のために適切な制御を車両に対して行うことができない。
【課題を解決するための手段】
【0005】
請求項1の発明による車両制御装置は、車両の走行道路に関する情報を取得する情報取得手段と、情報取得手段により取得された情報に基づいて、車両の急加速を禁止すべきか否かを判定する判定手段と、判定手段により車両の急加速を禁止すべきと判定されたときに、車両の急加速を禁止するための制御を行う制御手段とを備えるものである。
請求項2の発明は、請求項1に記載の車両制御装置において、情報取得手段は、走行道路の交通情報を取得し、判定手段は、交通情報に基づいて車両の前方が渋滞しているか否かを判定し、渋滞していると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項3の発明は、請求項1または2に記載の車両制御装置において、情報取得手段は、走行道路の地図情報を取得し、判定手段は、地図情報に基づいて車両の前方に一時停止すべき交差点があるか否かを判定し、一時停止すべき交差点があると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項4の発明は、請求項1〜3のいずれか一項に記載の車両制御装置において、情報取得手段は、走行道路において車両の前方を走行している先行車両までの車間距離情報を取得し、判定手段は、車間距離情報に基づいて車両から先行車両までの車間距離が所定値以下であるか否かを判定し、所定値以下であると判定したときに、車両の急加速を禁止すべきと判定するものである。
請求項5の発明は、請求項1〜4のいずれか一項に記載の車両制御装置において、制御手段は、判定手段により車両の急加速を禁止すべきと判定されたときに、車両のエンジン回転数を制限するための制御を車両の変速機に対して行うものである。
請求項6の発明によるナビゲーション装置は、車両を設定された目的地まで案内するための制御を行うナビゲーション装置であって、車両の走行道路に関する情報として、走行道路の交通情報、走行道路の地図情報、および走行道路において車両の前方を走行している先行車両までの車間距離情報のいずれか少なくとも1つを取得する情報取得手段と、情報取得手段により取得された情報に基づいて、車両の前方が渋滞しているか否か、車両の前方に一時停止すべき交差点があるか否か、および車両から先行車両までの車間距離が所定値以下であるか否かのいずれか少なくとも1つを判定することにより、車両の急加速を禁止すべきか否かを判定する判定手段と、判定手段により車両の急加速を禁止すべきと判定されたときに、車両の急加速を禁止するための信号を出力する信号出力手段とを備えるものである。
請求項7の発明による車両制御システムは、請求項6に記載のナビゲーション装置と、信号出力手段により出力された信号に応じて、車両のエンジンを制御するエンジン制御装置とを備えるものである。
請求項8の発明は、請求項7に記載の車両制御システムにおいて、信号出力手段により出力された信号に応じて、車両の変速機を制御する変速機制御装置をさらに備えるものである。
【発明の効果】
【0006】
本発明によれば、燃費向上のために適切な制御を車両に対して行うことができる。
【発明を実施するための最良の形態】
【0007】
本発明の一実施形態による車載システムの構成を図1に示す。この車載システムは、車両100に搭載されており、ナビゲーション装置1、通信端末2、カメラ3、画像認識装置4、エンジン5、エンジンコントローラ6、トランスミッション7、トランスミッションコントローラ8および車速センサ9を有する。
【0008】
ナビゲーション装置1は、車両100を目的地まで案内するためのナビゲーション機能を有している。すなわちナビゲーション装置1は、地図データに基づいて地図を表示すると共に、車両100の位置すなわち自車位置を検出し、その自車位置を地図上に示す。ユーザの操作により目的地が設定されると、その目的地までの推奨経路を地図データに基づいて探索し、探索した推奨経路に従って車両100を目的地まで案内する。
【0009】
なお、推奨経路を探索する際、ユーザは、目的地までの予想所要時間や走行距離、通行料金などに応じて推奨経路を決定するいわゆる通常の経路探索、または、省燃費用の経路探索のいずれかを選択することができる。省燃費用の経路探索が選択された場合、ナビゲーション装置1は、出発地から目的地までの間に複数の候補経路を設定し、その各候補経路について、車両100が走行するときの走行燃費または燃料消費量をそれぞれ推定する。その結果、推定された走行燃費が一番良い候補経路、または推定された燃料消費量が一番少ない候補経路を、推奨経路に設定する。なお、走行燃費または燃料消費量の具体的な推定方法については、後で詳しく説明する。
【0010】
またナビゲーション装置1は、車両100の走行燃費をユーザに報知するための燃費報知機能を有している。すなわちナビゲーション装置1は、通信端末2、画像認識装置4、エンジンコントローラ6、トランスミッションコントローラ8および車速センサ9からそれぞれ出力される各種の情報に基づいて、車両100の走行燃費を算出する。そして、所定の報知条件を満たしたときに、算出した走行燃費を音声出力することでユーザに対して報知する。
【0011】
さらにナビゲーション装置1は、車両100の燃料消費を軽減するための車両制御機能をも有している。すなわちナビゲーション装置1は、車両100の急加速を禁止すべきか否かを判断し、急加速を禁止すべきと判断した場合は、エンジンコントローラ6およびトランスミッションコントローラ8に対して、車両100の急加速を禁止するための急加速禁止信号を出力する。この急加速禁止信号がナビゲーション装置1から出力されると、エンジンコントローラ6は、エンジン5の動作を制御するためのエンジン制御信号を所定の省燃費モードに従って出力する。また、トランスミッションコントローラ8は、トランスミッション7の変速動作を制御するための変速制御信号を所定の省燃費モードに従って出力する。その結果、エンジン5とトランスミッション7を通常走行時よりも燃料消費を軽減するように動作させることができる。したがって、車両100の走行燃費を向上させることができる。
【0012】
ナビゲーション装置1は、以上説明したような各種の機能を有している。すなわち、本発明の一実施形態による車載システムにおいては、ナビゲーション装置1により、候補経路における車両100の走行燃費または燃料消費量を推定する燃費推定装置や、目的地までの推奨経路を探索する経路探索装置、車両100が走行中のときの走行燃費を算出する燃費算出装置、算出した走行燃費を報知する燃費報知装置、車両100の燃料消費を軽減するための制御を行う車両制御装置などが実現される。
【0013】
通信端末2は、不図示の交通情報配信センターと無線通信により接続し、交通情報配信センターから送信される交通情報を受信して、ナビゲーション装置1へ出力する。通信端末2によって受信される交通情報には、たとえば、過去の交通情報を統計的に処理して得られた統計交通情報や、今後の交通状況を予測した予測交通情報、全国各地の車両から収集された情報に基づくプローブ交通情報などが含まれる。なお、通信端末2には、たとえば携帯電話などが用いられる。
【0014】
カメラ3は、車両100の前方が撮影方向となるように設置されており、撮影した画像情報を画像認識装置4へ出力する。画像認識装置4は、カメラ3からの画像情報に基づいて、車両100の前方を走行している車両(先行車両)を検出する。先行車両を検出した場合、画像認識装置4は、車両100からその先行車両までの車間距離を算出する。そして、算出した車間距離情報をナビゲーション装置1へ出力する。
【0015】
なお、ここではカメラ3と画像認識装置4を用いることとしたが、先行車両を検出して車間距離を算出することができれば、どのような装置を用いてもよい。たとえば、電波や光波などを前方に向けて送信し、先行車両からの反射波を検出することによって車間距離を求めるレーダ装置などを、カメラ3と画像認識装置4の代わりに用いてもよい。
【0016】
エンジン5は、エンジンコントローラ6から出力されるエンジン制御信号に基づいて動作し、車両100が走行するための駆動力を発生する。このとき、車両100に備えられたアクセルペダルの操作によって決定されたアクセル開度に応じて、エンジン5においてスロットルバルブの開閉状態が制御され、エンジン5が吸入する空気量が調節される。この吸入空気量の計測結果等に基づいて、エンジンコントローラ6はエンジン5における燃料噴射量を決定し、エンジン5の燃料噴射装置を制御する。さらにエンジンコントローラ6は、所定期間内でのエンジン5の燃料噴射量を合計することで車両100の燃料消費量を算出し、その算出結果を燃料消費量情報として、アクセル開度情報と共にナビゲーション装置1へ出力する。
【0017】
なお、エンジンコントローラ6は、ナビゲーション装置1から急加速禁止信号が出力されると、エンジン5の出力を制限して車両100が急加速しないように制御する。すなわち、アクセル開度が大きいときであっても、スロットルバルブをあまり開かず、燃料噴射量を抑えるようにエンジン5を制御する。これにより、車両100の燃料消費量を抑えて省燃費走行を実現する。
【0018】
トランスミッション7は、エンジン5によって発生された駆動力を所定の変速比により車両100へと伝える。トランスミッション7の変速比は、トランスミッションコントローラ8から出力される変速制御信号に応じて変化される。トランスミッションコントローラ8は、エンジン5の回転数や、運転者からの変速指示などに応じて、トランスミッション7の変速比を決定し、変速制御信号を出力する。さらにトランスミッションコントローラ8は、トランスミッション7によって車両100に伝えられた駆動力の大きさを示す出力トルクを検出し、その検出結果を示す出力トルク情報をナビゲーション装置1へ出力する。
【0019】
なお、トランスミッションコントローラ8は、ナビゲーション装置1から急加速禁止信号が出力されると、トランスミッション7を通常とは異なる省燃費モードで動作させるための変速制御信号を出力する。すなわち、通常よりも低いエンジン回転数で変速比を高段側(低変速比側)に変化させるようにトランスミッション7を制御して、エンジン5の回転数をなるべく上げないように制限する。このようにすることで、車両100の燃料消費量を抑えて省燃費走行を実現する。
【0020】
車速センサ9は、車両100の走行速度すなわち自車速度に応じた車速情報を、車速パルスなどによってナビゲーション装置1へ出力する。この車速情報に基づいて、ナビゲーション装置1において車両100の走行速度が検出される。
【0021】
ナビゲーション装置1の構成を図2に示す。図2に示すように、ナビゲーション装置1は、制御部10、ハードディスク(HDD)11、表示モニタ12、振動ジャイロ13、GPS(Global Positioning System)受信部14、FM受信部15、入力装置16、マイク17およびスピーカ18を備えている。
【0022】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD11に記録されている制御プログラムや地図データに基づいて、前述したような各機能を実現するための各種の処理を実行する。このとき実行される処理の具体的な内容については、後でフローチャートを用いて説明する。
【0023】
なお、図1に示した各部からナビゲーション装置1に対して出力された各種の情報は、ナビゲーション装置1において所定の受信処理が行われた後、制御部10に入力される。すなわち、通信端末2からの交通情報、画像認識装置4からの車間距離情報、エンジンコントローラ6からの燃料消費量情報とアクセル開度情報、トランスミッションコントローラ8からの出力トルク情報、車速センサ9からの車速情報などが、制御部10に対して入力される。また、急加速を禁止すべき状況であると判断したときには、制御部10からエンジンコントローラ6およびトランスミッションコントローラ8に対して、前述のように急加速禁止信号が出力される。
【0024】
HDD11は不揮発性の記録媒体であり、地図データや後で説明する車両100の走行燃費履歴を含む各種のデータが記録されている。HDD11に記録されているデータは、必要に応じて制御部10の制御によりHDD11から読み出され、制御部10が実行する様々な処理や制御において利用される。
【0025】
なお、HDD11に記録された地図データには、経路計算データと、経路誘導データと、道路データと、背景データとが含まれている。経路計算データは、目的地までのルート探索に用いられる。経路誘導データは、設定された経路に従って自車両を目的地まで誘導するために用いられ、交差点名称や道路名称などを表す。道路データは、道路の形状や種別を表す。背景データは、河川や鉄道などの道路以外の地図形状や、各種施設の位置などを表す。なお、地図データにおいて各道路を表す最小単位はリンクと呼ばれている。すなわち、地図データにおいて各道路は複数のリンクによって構成されている。リンクとリンクの境界点はノードと呼ばれており、交差点などに対応している。
【0026】
表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。この表示モニタ12により地図が表示され、その地図上に自車位置が示される。なお、表示モニタ12は、たとえば車両100のダッシュボード上やインストルメントパネル内など、運転者であるユーザにとって運転席から見やすい位置に設置されている。
【0027】
振動ジャイロ13は、車両100の向きの変化に応じた角速度を検出するためのセンサである。この振動ジャイロ13により検出された角速度に基づいて、車両100の向きが求められる。GPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、車両100の位置と現在時刻を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて車両100の現在位置と現在時刻を算出することができる。
【0028】
FM受信部15は、FM放送により送信されるVICS情報を受信し、制御部10へ出力する。VICS情報とはVICS(Vehicle Information and Communication System)(登録商標)により提供される情報であり、高速道路や主要道路など特定の道路を対象とした交通情報などを含んでいる。なお、FM放送によるVICS情報に加えて、電波ビーコンや光波ビーコンから送信されるVICS情報をナビゲーション装置1において受信するようにしてもよい。
【0029】
入力装置16は、ナビゲーション装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0030】
なお、車両100の走行燃費を知りたい場合、ユーザは入力装置16に対して所定の報知要求操作を行うことにより、ナビゲーション装置1に対して車両100の走行燃費を算出させ、音声により報知させることができる。この報知要求操作は、様々な内容とすることができる。たとえば、所定のボタン操作やタッチパネル操作を報知要求操作に対応付けたり、あるいは音声認識を利用して、所定の音声を報知要求操作に対応付けたりすることができる。
【0031】
スピーカ18は、制御部10の制御により、車両100の走行に関する様々な音声情報を出力する。たとえば、推奨経路に従って自車両を目的地まで案内するための経路案内用の音声や、各種の警告音などを出力する。また、前述したように車両100の走行燃費を音声により出力する際にも、スピーカ18が用いられる。
【0032】
次に、ナビゲーション装置1の制御部10が実行する処理の内容について説明する。制御部10は、車両100がおかれている状況に応じて、燃費報知処理、経路探索処理および車両制御処理の各処理を実行することができる。
【0033】
燃費報知処理は、車両100の走行燃費を算出してユーザに報知する際に実行される処理である。この燃費報知処理が制御部10によって実行されることで、ユーザからの報知要求操作に応じた走行燃費の報知や、所定の報知条件を満たしたときの走行燃費の報知がナビゲーション装置1において行われる。これにより、前述したような燃費算出機能および燃費報知機能が実現される。
【0034】
経路探索処理は、目的地までの経路探索を行う際に実行される処理である。この経路探索処理が制御部10によって実行されることで、通常の経路探索または省燃費用の経路探索がナビゲーション装置1において行われる。これにより、前述したような燃費推定機能および経路探索機能がナビゲーション装置1において実現される。
【0035】
車両制御処理は、車両100の燃料消費を軽減するための制御を行う際に実行される処理である。この車両制御処理が制御部10によって実行されることで、車両100の急加速を禁止すべき状況であるか否かが判断され、急加速を禁止すべき状況のときには、ナビゲーション装置1からエンジンコントローラ6およびトランスミッションコントローラ8に対して急加速禁止信号が出力される。これにより、前述したような車両制御機能がナビゲーション装置1において実現される。
【0036】
まず、燃費報知処理の内容について説明する。図3は、制御部10において実行される燃費報知処理のフローチャートである。ステップS10において、制御部10は、入力装置16を用いてユーザから所定の報知要求操作が入力されたか否かを判定する。前述のような報知要求操作がユーザによって入力された場合はステップS20へ進み、報知要求操作が入力されない場合はステップS40へ進む。
【0037】
ステップS20において、制御部10は、車両100の瞬間走行燃費を算出する。ここでは、入力装置16に対してユーザから所定の報知要求操作が入力されたことがステップS10で検出された時点より所定時間前から、その報知要求操作の入力時点までの車両100の走行燃費を、瞬間走行燃費として算出する。この瞬間走行燃費を算出するために、制御部10は、エンジンコントローラ6から出力される燃料消費量情報と、車速センサ9から出力される車速情報とに基づいて、車両100の燃料消費量と走行距離の所定時間ごとの積算値をそれぞれ求め、最新の内容に随時更新する。報知要求操作の入力が検出されると、制御部10は、その時点で更新されている燃料消費量と走行距離の積算値に基づいて、瞬間走行燃費を算出する。
【0038】
ステップS30において、制御部10は、ステップS20で算出した瞬間走行燃費をスピーカ18から音声出力する。たとえば、「現在の走行燃費は○○km/リットルです」のような音声を出力して、瞬間走行燃費をユーザに報知する。こうして報知要求操作があった場合はそのときの瞬間走行燃費を報知して、ユーザの報知要求に応じるようにする。ステップS30を実行したら、ステップS170へ進む。
【0039】
なお、以上説明したステップS10〜S30では、報知要求操作の入力が検出されたときに瞬間走行燃費を算出することとしたが、瞬間走行燃費の算出を所定時間ごとに常時行うようにしてもよい。この場合、報知要求操作の入力を検出したら、その時点で算出されている最新の瞬間走行燃費をステップS30において音声出力すればよい。
【0040】
ステップS40において、制御部10は、エンジンコントローラ6から出力されるアクセル開度情報を受信することにより、車両100のアクセル開度を取得する。次のステップS50において、制御部10は、ステップS40で取得したアクセル開度に基づいて、車両100が急加速したか否かを判定する。すなわち、受信したアクセル開度情報によって示される車両100のアクセル開度が所定の大きさ以上となった場合は、車両100が急加速したと判定してステップS60へ進む。反対に、アクセル開度が所定の大きさ未満である場合は、車両100が急加速していないと判定してステップS80へ進む。
【0041】
ステップS60において、制御部10は、車両100が急加速中の走行燃費を算出する。ここでは、ステップS40で取得したアクセル開度に基づいて、車両100のアクセル開度が所定の大きさ以上である間の走行燃費を、急加速中の走行燃費として算出する。すなわち、アクセル開度が所定の大きさ以上である間にエンジンコントローラ6と車速センサ9からそれぞれ出力された燃料消費量情報および車速情報に基づいて、急加速中の燃料消費量と走行距離の積算値をそれぞれ求め、急加速中の走行燃費を算出する。
【0042】
ステップS70において、制御部10は、ステップS60で算出した急加速中の走行燃費をスピーカ18から音声出力する。たとえば、「今回の急加速の走行燃費は○○km/リットルです」のような音声を出力して、急加速中の走行燃費をユーザに報知する。こうして急加速中の走行燃費を報知することにより、急加速による走行燃費の悪化をユーザに認識させ、省燃費走行を心がけるように促す。ステップS70を実行したら、ステップS170へ進む。
【0043】
ステップS80において、制御部10は、HDD11に記録されている地図データのうち、車両100の走行地点付近の地図データを読み出して取得する。ステップS90において、制御部10は、車速センサ9から出力される車速情報に基づいて、車速すなわち車両100の走行速度を検出する。
【0044】
ステップS100において、制御部10は、ステップS80で取得した地図データと、ステップS90で検出した車速とに基づいて、車両100が高速道路を巡航しているか否かを判定する。ここでは、まずステップS80で取得した地図データに基づいて、車両100が高速道路を走行しているか否かを判断する。車両100が高速道路を走行していると判断した場合は、次にステップS90で検出した車速に基づいて、車両100がその高速道路を巡航しているか否かを判断する。車速が所定の速度範囲内である場合は、車両100が高速道路を巡航していると判断する。このときさらに、車速が所定の速度範囲内である走行区間が所定距離を超えたか否かを判定し、所定距離を超えたときに高速道路を巡航していると判断するようにしてもよい。このようにして、車両100が高速道路を巡航していると判定した場合は、ステップS110へ進む。一方、車両100が高速道路以外の道路を走行していると判断した場合や、車速が所定の速度範囲内にないため車両100が高速道路を巡航していないと判断した場合は、ステップS130へ進む。
【0045】
ステップS110において、制御部10は、車両100が高速道路を巡航中の走行燃費を算出する。ここでは、車両100が巡航中であると判断された高速道路の走行開始地点から現在の車両100の走行地点までの走行燃費を、高速道路巡航中の走行燃費として算出する。この高速道路巡航中の走行燃費を算出するために、制御部10は、車両100が高速道路の走行を開始すると、エンジンコントローラ6から出力される燃料消費量情報に基づいて、その時点からの車両100の燃料消費量の積算値を求めておく。車両100が高速道路を巡航中であると判定したら、制御部10は、その時点で求められている燃料消費量の積算値と、当該高速道路における車両100の走行開始地点から現在位置までの距離とに基づいて、高速道路巡航中の走行燃費を算出する。あるいは、巡航中の走行区間、すなわち車速が所定の速度範囲内である走行区間の走行燃費を、高速道路巡航中の走行燃費として算出してもよい。
【0046】
ステップS120において、制御部10は、ステップS110で算出した高速道路巡航中の走行燃費をスピーカ18から音声出力する。たとえば、「現在走行している高速道路の走行燃費は○○km/リットルです」のような音声を出力して、高速道路巡航中の走行燃費をユーザに報知する。こうして高速道路巡航中の走行燃費を報知することにより、走行燃費が改善したことをユーザに認識させ、省燃費走行を心がけるように促す。ステップS120を実行したら、ステップS170へ進む。
【0047】
なお、以上説明したステップS100〜S120では、車両100が高速道路を巡航していると判定したときに高速道路巡航中の走行燃費を算出することとしたが、車両100が高速道路の走行を開始した時点で、その高速道路における走行燃費を所定時間ごとに算出するようにしてもよい。この場合、車両100が高速道路を巡航していると判定したら、その時点で算出されている最新の走行燃費をステップS120において音声出力すればよい。
【0048】
ステップS130において、制御部10は、車両100の始動後の走行燃費を算出する。ここでは、車両100が始動してエンジン5が動作開始してから現在までの走行燃費を、車両始動後の走行燃費として算出する。この車両始動後の走行燃費を算出するために、車両100が始動してナビゲーション装置1の電源が投入されると、制御部10は、エンジンコントローラ6から出力される燃料消費量情報に基づいて、その時点からの車両100の燃料消費量の積算値を求めておく。この燃料消費量の積算値と、車両100の始動後から現在位置までの走行距離とに基づいて、車両始動後の走行燃費を算出する。
【0049】
ステップS140において、制御部10は、ステップS130で算出した車両始動後の走行燃費と、過去に算出された車両100の走行燃費履歴とを比較する。ここで比較対象とされる過去の走行燃費履歴は、後で説明するステップS170が実行されることによって過去にHDD11に記録されたものである。なお、HDD11には、過去の走行燃費履歴として、これまでに算出された車両始動後の走行燃費の最良値すなわち最も数値の高い走行燃費と、最悪値すなわち最も数値の低い走行燃費とを含む様々な走行燃費が記録されている。
【0050】
ステップS150において、制御部10は、ステップS140の比較結果に基づいて、今回算出した車両始動後の走行燃費がこれまでの最良値または最悪値を更新したか否かを判定する。最良値を更新した場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD11に記録された走行燃費の最良値よりも高い数値である場合、あるいは、最悪値を更新した場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD11に記録された走行燃費の最悪値よりも低い数値である場合は、ステップS160へ進む。一方、最良値と最悪値のいずれも更新していない場合、すなわち今回算出した車両始動後の走行燃費が、過去の走行燃費履歴としてHDD1
1に記録された走行燃費の最良値と最悪値の間にある場合は、ステップS170へ進む。
【0051】
ステップS160において、制御部10は、ステップS130で算出した車両始動後の走行燃費をスピーカ18から音声出力する。たとえば、最良値を更新した場合は、「今回の走行による走行燃費は○○km/リットルです。この調子で省エネ運転を続けて下さい。」のような音声を出力する。一方、最悪値を更新した場合は、「今回の走行による走行燃費は○○km/リットルです。もっと省エネ運転を心がけて下さい。」のような音声を出力する。これにより、現在の走行燃費がHDD11に記録された過去の走行燃費よりも高いまたは低いときに、その走行燃費をユーザに報知して省燃費走行を心がけるように促す。ステップS160を実行したら、ステップS170へ進む。
【0052】
ステップS170において、制御部10は、これまでの処理によって算出した走行燃費をHDD11に記録して走行燃費履歴を更新する。すなわち、今回算出した報知要求操作入力時の瞬間走行燃費、急加速中の走行燃費、高速道路巡航中の走行燃費、車両始動後の走行燃費などを、HDD11に記録された走行燃費履歴に新たに加える。なお、このとき上記で説明したような走行燃費以外にも、様々な走行燃費を算出してHDD11に走行燃費履歴として記録することが好ましい。たとえば、車両100の走行速度ごとに走行燃費を算出し、走行燃費履歴の一部としてHDD11に記録する。この走行速度ごとの走行燃費は、たとえば時速10kmごとに算出される。また、車両100が停止状態から発進するときの走行燃費を、走行燃費履歴の一部としてHDD11に記録する。ステップS170を実行したら、制御部10は図3のフローチャートを終了する。
【0053】
なお、上記のステップS170において更新される走行燃費履歴は、HDD11においてユーザ毎に記録されている。すなわち、ステップS170では、現在車両100を運転しているユーザに対して設定された走行燃費履歴のみを更新し、他のユーザに対して設定された走行燃費履歴は更新しないようにする。このようにするため、ナビゲーション装置1では、車両100の始動時などに予め所定のユーザ認識処理が行われる。たとえば、予め登録されたユーザIDをユーザに入力させたり、ユーザに固有の情報(たとえば、指紋、指や掌等の静脈、顔、虹彩、声紋など)を検出したりすることで、ユーザ認識処理が行われる。これ以外にもユーザ個人が特定できれば、どのような方法でユーザ認識処理を行ってもよい。
【0054】
以上説明したような燃費報知処理が制御部10において実行されることにより、ナビゲーション装置1は、ステップS10、S50、S100およびS150で説明したような様々な条件による判定を行う。この判定を行うことにより、車両100の走行燃費を報知すべきか否かを判定する。またナビゲーション装置1は、瞬間走行燃費、急加速中の走行燃費、高速道路巡航中の走行燃費および車両始動後の走行燃費のように、様々な種類の走行燃費を車両100について算出する。そして、上記の条件を満たすことで走行燃費を報知すべきと判定されたときに、算出した走行燃費を音声によりユーザに報知する。
【0055】
次に、経路探索処理の内容について説明する。図4は、制御部10において実行される経路探索処理のフローチャートである。ステップS210において、制御部10は、入力装置16を用いてユーザから入力された操作内容に応じて、車両100の目的地を設定する。
【0056】
ステップS220において、制御部10は、出発地すなわち現在の車両100の位置から、ステップS210で設定した目的地までの間に、複数の候補経路を探索する。ここでは、目的地までの予想所要時間や走行距離、通行料金などに基づいた通常の経路探索方法により、複数の候補経路を探索する。
【0057】
ステップS230において、制御部10は、ユーザが予め行った経路探索方法の選択結果に基づいて、省燃費用の経路探索を行うか否かを判定する。省燃費用の経路探索を行う場合はステップS240へ進む。一方、省燃費用の経路探索を行わない場合、すなわち通常の経路探索を行う場合は、ステップS340へ進む。
【0058】
ステップS240において、制御部10は、ステップS220で探索された複数の候補経路をそれぞれ対象道路に設定する。こうして設定された複数の対象道路に対して、以下で説明するような処理を制御部10が実行することにより、ナビゲーション装置1において省燃費用の経路探索が行われる。
【0059】
ステップS250において、制御部10は、ステップS240で設定した各対象道路についての対象道路情報を取得する。ここでは、各対象道路の道路状況に関する情報、たとえば、各対象道路の交差点情報、勾配情報、制限速度情報、交通情報などを、対象道路情報として取得する。
【0060】
上記の各情報のうち、交差点情報、勾配情報および制限速度情報は、HDD11に記録されている地図データに基づいて取得される。このうち交差点情報は、後で説明するステップS310において、対象道路の各交差点について車両100が停止する確率とその時間を推定するために用いられる情報である。たとえば、交差する道路の種別、信号の有無、車両100の進路(直進、右折、左折等)などを、対象道路情報の一部である交差点情報として地図データから取得する。また、勾配情報は、後で説明するステップS280とS290において車両100の燃料消費量を推定するために用いられる情報であり、対象道路の各地点における勾配を表している。制限速度情報は、後で説明するステップS260において車両100の走行速度を推定するために用いられる情報であり、対象道路の制限速度を表している。
【0061】
一方、対象道路情報のうち交通情報は、通信端末2によって受信されたものや、FM受信部15においてVICS情報として受信したものが用いられる。なお前述のように、通信端末2によって受信される交通情報には、統計交通情報、予測交通情報、プローブ交通情報などが含まれる。これらの様々な交通情報のうちいずれか少なくとも一つが、ステップS250において対象道路情報として取得される。
【0062】
以上説明したような各対象道路の道路状況に関する情報を対象道路情報として取得したら、次のステップS260において、制御部10は、各対象道路を車両100が走行する際の走行速度を推定する。ここでは、ステップS250で取得した対象道路情報のうち制限速度情報に基づいて、制限速度に応じた走行速度を推定する。なお、このとき推定される走行速度とは、車両100が発進時の加速や停止時の減速をしていないときの走行速度である。
【0063】
さらにステップS260では、ステップS250で取得した対象道路情報のうち交通情報に基づいて、各対象道路の渋滞状況や交通規制状況を判断し、走行速度の推定値に反映させるようにする。これにより、制限速度情報にのみ基づいて走行速度を推定する場合と比べて、より実際の走行時に近い走行速度を推定することができる。なお、対象道路の途中で制限速度や渋滞状況が変化する場合は、それに応じて、走行速度の推定値を対象道路内で変化させるようにする。
【0064】
ステップS270において、制御部10は、設定した各対象道路に対して、発進区間、走行区間および停止区間をそれぞれ設定する。発進区間とは、車両100が対象道路の交差点等で停止した場合に、その停止地点から発進して走行速度まで加速する区間である。走行区間とは、車両100が加速も減速もせず、ほぼ一定の走行速度により対象道路を走行する区間である。停止区間とは、車両100が対象道路の交差点等で停止する際に減速する区間である。
【0065】
制御部10がステップS270で設定する各区間の例を図5に示す。この図では、出発地21から目的地21までの間に設定された対象道路Tについて、発進区間D1、D4およびD7と、走行区間D2、D5およびD8と、停止区間D3、D6およびD9とを設定した例を示している。対象道路Tには、出発地21と目的地22の間に、交差点N1およびN2が存在する。交差点N1では、交差道路C1が対象道路Tと交差しており、交差点N2では、交差道路C2が対象道路Tと交差している。
【0066】
発進区間D1には、車両100が出発地21での停止状態からステップS260で推定した走行速度に達するまでの区間、すなわち車両100が出発地21を発進してから加速する区間が設定される。このときの加速度すなわち車速の上昇度合いは、予めナビゲーション装置1において学習されたユーザの運転傾向に応じて決定される。たとえば、前述のようにHDD11にユーザ毎に記録された走行燃費履歴から、車両100が停止状態から発進するときの走行燃費の履歴を取得する。この発進時の走行燃費の履歴に基づいてユーザの運転傾向を判断し、その判断の結果に応じて発進時の加速度を決定する。すなわち、走行燃費履歴において記録された過去の発進時の走行燃費が悪い(低い)ユーザに対しては、発進時に急加速する傾向があるとして、発進時の加速度を大きく設定する。その結果、発進区間D1が通常よりも短く設定される。反対に、走行燃費履歴において記録された過去の発進時の走行燃費が良い(高い)ユーザに対しては、発進時にゆっくり加速する傾向があるとして、発進時の加速度を小さく設定する。その結果、発進区間D1が通常よりも長く設定される。
【0067】
一方、停止区間D3には、車両100がステップS260で推定した走行速度から減速し、交差点N1において停止するまでの区間が設定される。このときの減速度すなわち車速の減少度合いは、予め設定された値が用いられる。あるいは、予めナビゲーション装置1においてユーザのブレーキ操作の傾向を学習し、その学習結果に応じて減速度を変化させるようにしてもよい。
【0068】
なお、走行区間D2は、上記のようにして設定される発進区間D1と停止区間D3の間に設定される。
【0069】
以上説明したようにして、出発地21から交差点N1までの間に、発進区間D1、走行区間D2および停止区間D3が設定される。同様にして、交差点N1から交差点N2までの間に、発進区間D4、走行区間D5および停止区間D6が設定され、交差点N2から目的地22までの間に、発進区間D7、走行区間D8および停止区間D9が設定される。
【0070】
なお、図5では出発地21から目的地22までの間に設定された1本の対象道路Tについて説明したが、実際には複数の対象道路について、上記と同様の各区間(発進区間、走行区間、停止区間)がそれぞれ設定される。また、図5では出発地21から目的地22までの間に2つの交差点N1、N2を有する対象道路Tを例に説明したが、交差点の数はこれに限定されない。さらに、交差点以外の一時停止地点(たとえば、合流地点、料金所、踏切等)を含めてもよい。ただし、車両100が一時停止しない交差点、たとえば対象道路が優先道路である信号のない交差点や、立体交差点などは、除外することが好ましい。
【0071】
以上説明したような各区間を各対象道路に対してそれぞれ設定したら、次のステップS280において、制御部10は、発進区間における車両100の燃料消費量を推定する。ここでは、各発進区間の前にある交差点(または出発地)で車両100が停止した場合の燃料消費量(停止時の燃料消費量)と、その交差点で車両100が停止しない場合の燃料消費量(通過時の燃料消費量)とを、各発進区間について推定する。
【0072】
発進区間における停止時の燃料消費量を推定する際には、予めHDD11においてユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の発進時の走行燃費の履歴、すなわち車両100が停止状態から発進するときに算出されて記録された走行燃費の履歴を取得する。この発進時の走行燃費の履歴と、ステップS270で設定した各発進区間の距離とに基づいて、各発進区間における停止時の燃料消費量を各対象道路についてそれぞれ推定する。
【0073】
一方、発進区間における通過時の燃料消費量を推定する際には、まず、各発進区間における通過時の走行速度の推定値を求める。ここでは、前述のステップS260において推定された走行速度のうち、各発進区間に対応する範囲での走行速度をそれぞれ求めることにより、各発進区間における通過時の走行速度の推定値を求める。次に、予めHDD11にユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。この走行速度ごとの走行燃費の履歴に基づいて、上記の通過時の走行速度の推定値に対応する走行燃費を特定する。こうして特定した走行燃費と、各発進区間の距離とに基づいて、各発進区間における通過時の燃料消費量を各対象道路についてそれぞれ推定する。
【0074】
以上説明したようなステップS280の処理が実行されることにより、図5の例において、発進区間D1、D4、D7について停止時および通過時の燃料消費量がそれぞれ推定される。
【0075】
ステップS290において、制御部10は、走行区間における車両100の燃料消費量を推定する。ここでは、上記ステップS280で各発進区間について通過時の燃料消費量を推定したのと同様の方法により、各走行区間について燃料消費量をそれぞれ推定する。すなわち、ステップS260で推定された対象道路の走行速度に基づいて、各走行区間における通過時の走行速度の推定値を求めると共に、予めHDD11にユーザ毎に記録された走行燃費履歴から、当該ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。この走行速度ごとの走行燃費の履歴に基づいて、各走行区間における走行速度の推定値に対応する走行燃費を特定する。こうして特定した走行燃費と、各走行区間の距離とに基づいて、各走行区間における燃料消費量を各対象道路についてそれぞれ推定する。
【0076】
以上説明したようなステップS290の処理が実行されることにより、図5の例において走行区間D2、D5、D8の燃料消費量がそれぞれ推定される。
【0077】
なお、ステップS280で発進区間の燃料消費量を推定する際や、ステップS290で走行区間の燃料消費量を推定する際には、車両100の重量や対象道路の勾配を考慮することが好ましい。車両100の重量は、予め設定された値を用いてもよい。あるいは、車両100の走行中に車速センサ9とトランスミッションコントローラ8からそれぞれ出力される車速情報と出力トルク情報を取得し、これらに基づいて車両100の重量を推定してもよい。すなわち、車速情報と出力トルク情報から、出力トルクに対する車両100の車速の変化量を求め、これに基づいて車両100の重量を推定する。このとき、HDD11に記録された地図データから走行中の道路勾配の情報を取得して、推定結果に反映させても良い。こうして推定された車両100の重量と、ステップS250で対象道路情報の一部として取得した対象道路の勾配情報とに基づいて、発進区間および走行区間の燃料消費量を推定することができる。すなわち、車両100の重量が重いほど、また対象道路の勾配が大きいほど、燃料消費量の推定値を大きくする。
【0078】
ステップS300において、制御部10は、停止区間における車両100の燃料消費量を推定する。ここでは、ステップS280の処理と同様に、停止時の燃料消費量、すなわち各停止区間の後にある交差点(または目的地)で車両100が停止した場合の燃料消費量と、通過時の燃料消費量、すなわち当該交差点で車両100が停止しない場合の燃料消費量とを、各停止区間について推定する。
【0079】
停止区間における停止時の燃料消費量は、ステップS270で設定した各停止区間の距離に応じて所定の燃料消費量を設定することで推定される。一方、停止区間における通過時の燃料消費量は、ステップS280と同様の方法により推定される。すなわち、ステップS260で推定された対象道路の走行速度に基づいて、各停止区間における通過時の走行速度を推定する。この通過時の走行速度の推定値に対応する走行燃費を、当該ユーザに対する走行燃費履歴の一部としてHDD11に記録された走行速度ごとの走行燃費の履歴に基づいて特定する。こうして特定した走行燃費と、各停止区間の距離とに基づいて、各停止区間における通過時の燃料消費量を各対象道路についてそれぞれ推定する。なお、ここで推定される燃料消費量には、交差点で停止している間の燃料消費量は含まれない。
【0080】
以上説明したようなステップS300の処理が実行されることにより、図5の例において、停止区間D3、D6、D9について停止時および通過時の燃料消費量がそれぞれ推定される。
【0081】
ステップS310において、制御部10は、対象道路の各交差点において車両100が停止する停止確率と、その停止時間とを推定する。ここでは、ステップS250で取得した対象道路情報のうち交差点情報に基づいて、各交差点の停止確率と停止時間を各対象道路についてそれぞれ推定する。たとえば、対象道路よりも交差する道路の種別が高く交通量が多いと考えられる場合や、信号がある場合は、停止確率と停止時間の推定値を比較的高く設定する。さらに、右折または左折する場合は、直進時よりも高い推定値とする。反対に、対象道路よりも交差する道路の種別が低く交通量が少ないと考えられる場合や、信号がない場合には、停止確率の推定値を比較的低く設定する。このとき、交通情報を加味して推定値を変化させてもよい。あるいは、各交差点に対する停止確率と停止時間の統計的な情報をHDD11に記録しておき、これを取得することで、停止確率と停止時間を推定するようにしてもよい。
【0082】
ステップS320において、制御部10は、ステップS310で推定した各交差点での停止時間に基づいて、対象道路の交差点における停止中の燃料消費量、すなわち交差点において車両100が停止している間のアイドリング中の燃料消費量を推定する。ここでは、各交差点について推定した停止時間に、所定のアイドリング燃費(車両100がアイドリング中に消費する単位時間当たりの燃料量)を乗算することで、各交差点における停止中の燃料消費量を各対象道路についてそれぞれ推定する。ステップS320が実行されることにより、図5の例において交差点N1、N2に対する停止中の燃料消費量がそれぞれ推定される。
【0083】
ステップS330において、制御部10は、車両100が対象道路の各交差点を通る際の燃料消費量をそれぞれ推定する。ここでは、対象道路の各交差点に対して、まず、停止時の燃料消費量、すなわち当該交差点で車両100が停止する場合の燃料消費量の推定値と、通過時の燃料消費量、すなわち当該交差点で車両100が停止しない場合の燃料消費量の推定値とを、各対象道路についてそれぞれ求める。
【0084】
上記の2つの推定値のうち停止時の燃料消費量の推定値は、当該交差点の前に位置する停止区間に対してステップS300で推定した停止時の燃料消費量と、当該交差点に対してステップS320で推定した停止中の燃料消費量と、当該交差点の次に位置する発進区間に対してステップS280で推定した停止時の燃料消費量とを合計することにより、求められる。一方、通過時の燃料消費量の推定値は、当該交差点の前に位置する停止区間に対してステップS300で推定した通過時の燃料消費量と、当該交差点の次に位置する発進区間に対してステップS280で推定した通過時の燃料消費量とを合計することにより、求められる。
【0085】
上記のようにして停止時の燃料消費量の推定値と通過時の燃料消費量の推定値とを求めたら、次に制御部10は、これらの燃料消費量の推定値を、ステップS310で推定した停止確率に基づいて重み付けする。すなわち、停止確率が高い交差点ほど、停止時の燃料消費量の重み付けを高くする一方で、通過時の燃料消費量の重み付けを低くして、これらの燃料消費量の推定値を合計する。反対に、停止確率が低い交差点ほど、停止時の燃料消費量の重み付けを低くする一方で、通過時の燃料消費量の重み付けを高くして、これらの燃料消費量の推定値を合計する。このような処理を各対象道路について交差点ごとに行うことで、各交差点を通る際の燃料消費量をそれぞれ推定する。
【0086】
以上説明したステップS270〜S330の処理が制御部10において実行されることにより、ステップS250で対象道路情報として取得された交差点情報に基づいて、対象道路の各交差点を車両100が通る際の燃料消費量がそれぞれ推定される。こうして交差点を通る際の燃料消費量を推定したら、次のステップS340において、制御部10は、対象道路を車両100が走行する場合の燃料消費量を推定する。ここでは、ステップS330で各交差点に対して求めた通過時の燃料消費量の推定値と、各走行区間における燃料消費量の推定値とを、各対象道路について出発地から目的地までそれぞれ合計する。これにより、各対象道路を走行する場合の燃料消費量をそれぞれ推定する。
【0087】
たとえば図5の例において、交差点N1、N2における停止確率がそれぞれP1、P2であり、停止中の燃料消費量の推定値がそれぞれEs(N1)、Es(N2)であるとする。また、発進区間D1、D4、D7における停止時の燃料消費量の推定値が、それぞれEs(D1)、Es(D4)、Es(D7)であり、発進区間D4、D7における通過時の燃料消費量の推定値が、それぞれEt(D4)、Et(D7)であるとする。さらに、走行区間D2、D5、D8における燃料消費量の推定値が、それぞれEt(D2)、Et(D5)、Et(D8)であるとする。加えて、停止区間D3、D6、D9における停止時の燃料消費量の推定値が、それぞれEs(D3)、Es(D6)、Es(D9)であり、停止区間D3、D6における通過時の燃料消費量の推定値が、それぞれEt(D3)、Et(D6)であるとする。なお、出発地21からの発進区間D1の前と、目的地22へ至る停止区間D9の後では、必ず車両100が停止する。したがって、これらについては通過時の燃料消費量は推定されない。
【0088】
このとき、車両100が対象道路Tを走行する場合の燃料消費量の推定値E(T)は、次の式(1)により求められる。
E(T)=Es(D1)+Et(D2)
+P1・{Es(D3)+Es(N1)+Es(D4)}
+(1−P1)・{Et(D3)+Et(D4)}
+Et(D5)
+P2・{Es(D6)+Es(N2)+Es(D7)}
+(1−P2)・{Et(D6)+Et(D7)}
+Et(D8)+Es(D9) ・・・(1)
【0089】
なお、上記の式(1)において、P1・{Es(D3)+Es(N1)+Es(D4)}+(1−P1)・{Et(D3)+Et(D4)}の部分は、車両100が交差点N1を通過する際の燃料消費量の推定値を表している。また、P2・{Es(D6)+Es(N2)+Es(D7)}+(1−P2)・{Et(D6)+Et(D7)}の部分は、車両100が交差点N2を通過する際の燃料消費量の推定値を表している。これらの交差点通過時の燃料消費量の推定値は、ステップS330において求められたものである。
【0090】
省燃費用の経路探索を行う際には、以上説明したようなステップS240〜S340の処理が実行される。これにより、ステップS220で探索した複数の経路がそれぞれ対象道路に設定され、その各対象道路に対して、車両100が走行する場合の燃料消費量が推定される。
【0091】
ステップS350において、制御部10は、ステップS220で探索した複数の候補経路の中からいずれかを目的地までの推奨経路として選択する。ここでは、省燃費用の経路探索を行うとステップS230において判定し、ステップS240〜S340の処理を実行することによって各対象道路を車両100が走行する場合の燃料消費量を推定した場合には、その各対象道路に対する燃料消費量の推定値に基づいて、最も燃料消費量が少ない対象道路を推奨経路として選択する。一方、省燃費用の経路探索を行わないとステップS230において判定した場合には、目的地までの予想所要時間などに基づいて、ステップS220で探索した複数の候補経路のいずれかを推奨経路として選択する。ステップS350を実行したら、制御部10は図4のフローチャートを終了する。
【0092】
以上説明したような経路探索処理が制御部10において実行されることにより、ナビゲーション装置1は、複数の候補経路を探索して対象道路に設定し、その対象道路に関する情報を取得して、車両100が対象道路を走行する場合の燃料消費量を推定する。そして、算出した燃料消費量に基づいて、対象道路に設定された候補経路のいずれかを推奨経路に設定する。
【0093】
なお、上記の経路探索処理では車両100が対象道路を走行する場合の燃料消費量を推定することとしたが、燃料消費量に代えて走行燃費を推定することとしてもよい。すなわち、各対象道路の距離に基づいて、ステップS340で求めた各対象道路の燃料消費量の推定値を走行燃費の推定値にそれぞれ換算してもよい。このようにした場合でも、換算した各対象道路の走行燃費の推定値に基づいて、対象道路のいずれかを目的地までの推奨経路として選択することができる。
【0094】
次に、車両制御処理の内容について説明する。図6は、制御部10において実行される車両制御処理のフローチャートである。ステップS410において、制御部10は、通信端末2において受信された交通情報と、FM受信部15において受信されたVICS情報とを取得する。このとき、交通情報とVICS情報の取得対象とする道路範囲の中に、車両100の走行道路が少なくとも含まれているものとする。なお、交通情報とVICS情報のいずれか一方のみを取得してもよい。次のステップS420において、制御部10は、車両100の走行道路を少なくとも含む所定の地図範囲の地図データをHDD11から読み出す。
【0095】
ステップS430において、制御部10は、ステップS410で取得した交通情報またはVICS情報と、ステップS420で読み出した地図データとに基づいて、車両100の前方が渋滞しているか否かを判定する。すなわち、交通情報やVICS情報に表されている渋滞情報と地図データに基づいて、道路上で渋滞している地点を特定する。こうして特定された渋滞地点のいずれかが、車両100が走行中の道路の前方において存在するか否かを判定する。その結果、前方が渋滞していると判定した場合はステップS470へ進み、渋滞していないと判定した場合はステップS440へ進む。
【0096】
ステップS440において、制御部10は、車両100の前方に一時停止すべき交差点があるか否かを、ステップS420で読み出した地図データに基づいて判定する。前方に一時停止すべき交差点があると判定した場合はステップS470へ進み、ないと判定した場合はステップS450へ進む。なお、ここで判定対象とされる一時停止すべき交差点とは、図4の経路探索処理において説明した停止区間と発進区間の境界点に相当する交差点である。したがって、交差点以外の一時停止地点(合流地点、料金所、踏切等)を判定対象に含めてもよい。
【0097】
ステップS450において、制御部10は、画像認識装置4から出力される車間距離情報を取得する。この車間距離情報は、現在の車両100の走行道路における先行車両までの車間距離を表している。なお、先行車両は、前述のようにカメラ3によって車両100の前方を撮影して得られた画像情報に基づいて、画像認識装置4により検出される。こうして検出された先行車両までの車間距離が画像認識装置4において算出され、車間距離情報として制御部10へ出力される。
【0098】
ステップS460において、制御部10は、ステップS450で取得した車間距離情報に基づいて、車両100から先行車両までの車間距離が所定のしきい値以下であるか否かを判定する。車間距離がしきい値以下である場合はステップS470へ進み、しきい値未満である場合は図6のフローチャートを終了する。なお、ステップS460の判定に用いるしきい値には、車両100において急加速する必要がない車間距離、たとえば100mなどの値が予め設定される。
【0099】
ステップS470において、制御部10は、エンジンコントローラ6およびトランスミッションコントローラ8に対して、急加速禁止信号を出力する。すなわち、ステップS430において車両100の前方が渋滞していると判定した場合、ステップS440において車両100の前方に一時停止すべき交差点があると判定した場合、または、ステップS460において車両100から先行車両までの車間距離が所定値以下であると判定した場合には、制御部10の制御により、ナビゲーション装置1からエンジンコントローラ6およびトランスミッションコントローラ8に対して急加速禁止信号が出力される。ステップS470を実行したら、制御部10は図6のフローチャートを終了する。
【0100】
上記のステップS470が実行されることにより、ナビゲーション装置1から急加速禁止信号が出力されると、エンジンコントローラ6は、前述のようにエンジン5の出力を制限して車両100が急加速しないように制御する。また、トランスミッションコントローラ8は、前述のようにトランスミッション7を通常とは異なる省燃費モードで動作させるための変速制御信号を出力する。これにより、ナビゲーション装置1は車両100の急加速を禁止するための制御を行う。その結果、車両100の燃料消費量を抑えて省燃費走行を実現することができる。
【0101】
以上説明したような車両制御処理が制御部10において実行されることにより、ナビゲーション装置1は、車両100の走行道路に関する情報として、車両100の走行道路についての交通情報やVICS情報、地図データ、車間距離情報を取得する。これらの情報に基づいて、ステップS430、S440およびS460でそれぞれ説明したような所定の判定条件を満たすか否かを判定することで、車両100の急加速を禁止すべきか否かの判定を行う。そして、禁止すべきと判定したときには、車両100の急加速を禁止するための急加速禁止信号を出力する。
【0102】
以上説明した実施の形態によれば、次の作用効果を奏する。
(1)ナビゲーション装置1は、制御部10の処理により、様々な条件による判定を行う(ステップS10、S50、S100およびS150)ことで、車両100の走行燃費を報知すべきか否かを判定する。また、ナビゲーション装置1は、制御部10の処理により、様々な種類の車両100の走行燃費を算出する(ステップS20、S60、S110およびS130)。そして、走行燃費を報知すべきと判定したときに、算出した走行燃費を音声により報知する(ステップS30、S70、S120およびS160)こととした。このようにしたので、適切なタイミングと方法で車両100の走行燃費を報知することができる。
【0103】
(2)制御部10は、ステップS10において、入力装置16に対してユーザから所定の報知要求操作が入力されたときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS20を実行して、入力装置16に対して報知要求操作が入力された時点より所定時間前からその報知要求操作の入力時点までの瞬間走行燃費を算出する。こうして算出した瞬間走行燃費をステップS30において音声出力することとしたので、ユーザの報知要求に応じて効果的に燃費情報の報知を行うことができる。
【0104】
(3)制御部10は、車両100のアクセル開度を取得する(ステップS40)。ステップS50では、このアクセル開度に基づいて、車両100が急加速したか否かを判断し、急加速したと判断したときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS60を実行して、アクセル開度が所定の大きさ以上である間の走行燃費を急加速中の走行燃費として算出する。こうして算出した急加速中の走行燃費をステップS70において音声出力することとしたので、急加速したときに効果的に燃費情報の報知を行うことができる。その結果、急加速による走行燃費の悪化をユーザに認識させ、省燃費走行を心がけるように促すことができる。
【0105】
(4)制御部10は、車両100の走行地点付近の地図データをHDD11から読み出して取得する(ステップS80)と共に、車両100の走行速度を検出する(ステップS90)。ステップS100では、ステップS80で取得した地図データに基づいて車両100が高速道路を走行しているか否かを判断し、高速道路を走行していると判断した場合には、ステップS90で検出した走行速度に基づいて、車両100が高速道路を巡航しているか否かを判断する。こうして車両100が高速道路を巡航していると判断したときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS110を実行して、車両100が巡航していると判断された高速道路の走行開始地点から現在の車両100の走行地点までの走行燃費を、高速道路巡航中の走行燃費として算出する。こうして算出した高速道路巡航中の走行燃費をステップS120において音声出力することとしたので、高速道路巡航中に効果的に燃費情報の報知を行うことができる。その結果、走行燃費が改善したことをユーザに認識させ、省燃費走行を心がけるように促すことができる。
【0106】
(5)制御部10は、ステップS130において、車両始動後の走行燃費として車両100が始動してから現在までの走行燃費を算出する。この車両始動後の走行燃費と、ステップS170において過去にHDD11に記録された走行燃費履歴とを比較する(ステップS140)。ステップS150では、ステップS140の比較結果に基づいて、ステップS130で算出された車両始動後の走行燃費が、過去にHDD11に記録された走行燃費履歴の最良値よりも高い、または最悪値よりも低いときに、車両100の走行燃費を報知すべきと判定する。この場合、ステップS130で算出した車両始動後の走行燃費をステップS160において音声出力することとしたので、現在の走行燃費がHDD11に記録された過去の走行燃費よりも高いまたは低いときに、効果的にその走行燃費をユーザに報知して、省燃費走行を心がけるように促すことができる。
【0107】
(6)ナビゲーション装置1は、制御部10により、ステップS20、S60またはS110のいずれか少なくとも一つを実行することで、ユーザから所定の報知要求操作が入力された時点より所定時間前からその報知要求操作の入力時点までに車両100が走行した道路区間、車両100が加速中に走行した道路区間、または車両100が走行した高速道路区間のいずれか少なくとも一つについて、走行燃費を算出することができる。このようにしたので、様々な種類の走行燃費を状況に応じて算出することができる。
【0108】
(7)ナビゲーション装置1は、制御部10の処理により、対象道路に関する対象道路情報を取得し(ステップS250)、その対象道路情報に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する(ステップS260〜S340)こととした。このようにしたので、車両100が実際に走行していない道路について、走行燃費や燃料消費量を推定することができる。
【0109】
(8)制御部10は、ステップS250において、対象道路の各交差点についての交差点情報を対象道路情報として取得する。この交差点情報に基づいて、対象道路の各交差点を車両100が通る際の燃料消費量をそれぞれ推定し(ステップS270〜S330)、推定した燃料消費量に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量をステップS340で推定することとした。このようにしたので、車両100が実際に走行していない道路の走行燃費や燃料消費量を正確に推定することができる。
【0110】
(9)制御部10は、ステップS250で取得した交差点情報に基づいて、対象道路の各交差点における停止確率を推定する(ステップS310)。ステップS330では、こうして推定した停止確率に基づいて、対象道路の各交差点における停止時の燃料消費量の推定値と通過時の燃料消費量の推定値とを重み付けすることにより、対象道路の各交差点を車両100が通る際の燃料消費量をそれぞれ推定する。このようにしたので、対象道路の各交差点を車両100が通る際の燃料消費量を、車両100が当該交差点で停止する確率に応じて正確に推定することができる。したがって、より正確に走行燃費や燃料消費量の推定を行うことができる。
【0111】
(10)制御部10は、ステップS250において、対象道路の交通情報、すなわち統計交通情報、予測交通情報、およびプローブ交通情報のいずれか少なくとも1つを、対象道路情報として取得する。ステップS340では、この交通情報に基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。すなわち、取得した交通情報に基づいて、各対象道路の渋滞状況や交通規制状況を判断し、その判断結果を反映して車両100の走行速度を推定する(ステップS260)。この走行速度の推定値に基づいて、発進区間、走行区間および停止区間の燃料消費量をそれぞれ推定し(ステップS280〜S300)、推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することとした。このようにしたので、より実際の走行時に近い走行速度を推定して、走行燃費や燃料消費量の推定に反映させることができる。
【0112】
(11)制御部10は、ステップS250で取得した対象道路情報と共に、ユーザの運転傾向に関する情報をステップS280、S290およびS300において取得する。ステップS340では、この対象道路情報とユーザの運転傾向に関する情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。すなわち、ステップS280〜S300では、ユーザの運転傾向に関する情報として、ユーザが車両100を運転した際の走行速度ごとの走行燃費の履歴を取得する。そして、ステップS260で推定した対象道路における車両100の推定走行速度と、取得した走行速度ごとの走行燃費の履歴とに基づいて、各区間の燃料消費量を推定する。こうして推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。また、ステップS280では、ユーザの運転傾向に関する情報として、ユーザが車両100を運転した際の発進時の走行燃費の履歴を取得する。そして、取得した発進時の走行燃費の履歴に基づいて、発進区間の燃料消費量を推定する。こうして推定した各区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定する。このようにしたので、ユーザの運転傾向を反映して、より正確に走行燃費や燃料消費量の推定を行うことができる。
【0113】
(12)また制御部10は、ステップS250で取得した対象道路情報と共に、車両100に関する情報をステップS280およびS290において取得することができる。ステップS340では、この対象道路情報と車両100に関する情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。すなわち、ステップS280、S290では、車両100に関する情報として、車両100の速度情報と、車両100の出力トルク情報とを取得する。この速度情報および出力トルク情報に基づいて車両100の重量を推定し、推定した車両100の重量に基づいて、発進区間および走行区間の燃料消費量を推定することができる。こうして推定した発進区間および走行区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。このようにすれば、車両100の重量を反映して、より一層正確に走行燃費や燃料消費量の推定を行うことができる。
【0114】
(13)さらに制御部10は、ステップS250において、対象道路の勾配情報を対象道路情報として取得し、ステップS340において、車両100の重量と取得した勾配情報とに基づいて、車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。すなわち、ステップS280、S290において、車両100の重量と勾配情報に基づいて、発進区間および走行区間の燃料消費量を推定することができる。こうして推定した発進区間および走行区間の燃料消費量に基づいて、ステップS340において車両100が対象道路を走行する場合の走行燃費または燃料消費量を推定することができる。このようにすれば、対象道路の勾配を反映して、さらに一層正確に走行燃費や燃料消費量の推定を行うことができる。
【0115】
(14)ナビゲーション装置1は、制御部10の処理により、目的地を設定し(ステップS210)、その目的地までの複数の経路を探索する(ステップS220)。この複数の経路を対象道路に設定して(ステップS240)、ステップS250〜S340の処理により、車両100が走行する場合の走行燃費または燃料消費量をそれぞれ推定する。こうして推定された走行燃費または燃料消費量に基づいて、対象道路に設定された経路のいずれかを目的地までの推奨経路として選択する(ステップS350)こととした。このようにしたので、推定された走行燃費が一番良い候補経路、または推定された燃料消費量が一番少ない候補経路を推奨経路に設定して、省燃費用の経路探索を行うことができる。
【0116】
(15)ナビゲーション装置1は、制御部10の処理により、車両100の走行道路に関する情報を取得し(ステップS410、S420およびS450)、取得した情報に基づいて、所定の判定条件を満たすか否かを判定することにより、車両100の急加速を禁止すべきか否かを判定する(ステップS430、S440およびS460)。その結果、車両100の急加速を禁止すべきと判定したときに、急加速禁止信号を出力する(ステップS470)ことで、車両100の急加速を禁止するための制御を行うこととした。このようにしたので、燃費向上のために適切な制御を車両100に対して行うことができる。
【0117】
(16)制御部10は、車両100の走行道路の交通情報を取得し(ステップS410)、取得した交通情報に基づいて車両100の前方が渋滞しているか否かを判定する(ステップS430)。その結果、渋滞していると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100の前方が渋滞しているときに、不要な急加速を禁止するように車両100を制御することができる。
【0118】
(17)また、制御部10は、車両100の走行道路の地図情報を取得し(ステップS420)、取得した地図情報に基づいて車両100の前方に一時停止すべき交差点があるか否かを判定する(ステップS440)。その結果、一時停止すべき交差点があると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100の前方に一時停止すべき交差点があるときに、不要な急加速を禁止するように車両100を制御することができる。
【0119】
(18)さらに、制御部10は、車両100の走行道路において車両100の前方を走行している先行車両までの車間距離情報を取得し(ステップS450)、取得した車間距離情報に基づいて車両100から先行車両までの車間距離が所定値以下であるか否かを判定する(ステップS460)。その結果、所定値以下であると判定したときには、車両100の急加速を禁止すべきと判定してステップS470の処理を実行し、急加速禁止信号を出力することとした。このようにしたので、車両100から先行車両までの車間距離が所定値以下であるときに、不要な急加速を禁止するように車両100を制御することができる。
【0120】
(19)制御部10は、ステップS430、S440またはS460のいずれかの判定によって車両100の急加速を禁止すべきと判定されたときに、ステップS470の処理を実行して急加速禁止信号をトランスミッションコントローラ8へ出力する。この急加速禁止信号に応じて、トランスミッションコントローラ8は、トランスミッション7を省燃費モードで動作させるための変速制御信号をランスミッション7へ出力することで、通常よりも低いエンジン回転数で変速比を高段側に変化させるようにトランスミッション7を制御し、エンジン5の回転数をなるべく上げないように制限する。このようにして、制御部10により、車両100のエンジン5の回転数を制限するための制御を車両100のトランスミッション7に対して行うこととしたので、車両100の燃料消費量をさらに抑えて省燃費走行を実現することができる。
【0121】
なお、以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【0122】
以上説明した実施の形態では、特許請求の範囲に記載された各手段を制御部10が実行する処理によってそれぞれ実現することとした。すなわち、制御部10は、情報取得手段、判定手段、制御手段および信号出力手段として機能する。なお、以上の説明はあくまで一例であり、発明を解釈する際、実施の形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0123】
【図1】本発明の一実施形態による車載システムの構成を示す図である。
【図2】ナビゲーション装置の構成を示す図である。
【図3】燃費報知処理のフローチャートである。
【図4】経路探索処理のフローチャートである。
【図5】発進区間、走行区間および停止区間の設定例を示す図である。
【図6】車両制御処理のフローチャートである。
【符号の説明】
【0124】
1:ナビゲーション装置、2:通信端末、3:カメラ、4:画像認識装置、
5:エンジン、6:エンジンコントローラ、7:トランスミッション、
8:トランスミッションコントローラ、9:車速センサ、
10:制御部、11:HDD、12:表示モニタ、13:振動ジャイロ、
14:GPS受信部、15:FM受信部、16:入力装置、
17:マイク、18:スピーカ、100:車両
【特許請求の範囲】
【請求項1】
車両の走行道路に関する情報を取得する情報取得手段と、
前記情報取得手段により取得された情報に基づいて、前記車両の急加速を禁止すべきか否かを判定する判定手段と、
前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両の急加速を禁止するための制御を行う制御手段とを備えることを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記情報取得手段は、前記走行道路の交通情報を取得し、
前記判定手段は、前記交通情報に基づいて前記車両の前方が渋滞しているか否かを判定し、渋滞していると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項3】
請求項1または2に記載の車両制御装置において、
前記情報取得手段は、前記走行道路の地図情報を取得し、
前記判定手段は、前記地図情報に基づいて前記車両の前方に一時停止すべき交差点があるか否かを判定し、一時停止すべき交差点があると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
前記情報取得手段は、前記走行道路において前記車両の前方を走行している先行車両までの車間距離情報を取得し、
前記判定手段は、前記車間距離情報に基づいて前記車両から前記先行車両までの車間距離が所定値以下であるか否かを判定し、所定値以下であると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両制御装置において、
前記制御手段は、前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両のエンジン回転数を制限するための制御を前記車両の変速機に対して行うことを特徴とする車両制御装置。
【請求項6】
車両を設定された目的地まで案内するための制御を行うナビゲーション装置であって、
前記車両の走行道路に関する情報として、前記走行道路の交通情報、前記走行道路の地図情報、および前記走行道路において前記車両の前方を走行している先行車両までの車間距離情報のいずれか少なくとも1つを取得する情報取得手段と、
前記情報取得手段により取得された情報に基づいて、前記車両の前方が渋滞しているか否か、前記車両の前方に一時停止すべき交差点があるか否か、および前記車両から前記先行車両までの車間距離が所定値以下であるか否かのいずれか少なくとも1つを判定することにより、前記車両の急加速を禁止すべきか否かを判定する判定手段と、
前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両の急加速を禁止するための信号を出力する信号出力手段とを備えることを特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置と、
前記信号出力手段により出力された信号に応じて、前記車両のエンジンを制御するエンジン制御装置とを備えることを特徴とする車両制御システム。
【請求項8】
請求項7に記載の車両制御システムにおいて、
前記信号出力手段により出力された信号に応じて、前記車両の変速機を制御する変速機制御装置をさらに備えることを特徴とする車両制御システム。
【請求項1】
車両の走行道路に関する情報を取得する情報取得手段と、
前記情報取得手段により取得された情報に基づいて、前記車両の急加速を禁止すべきか否かを判定する判定手段と、
前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両の急加速を禁止するための制御を行う制御手段とを備えることを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記情報取得手段は、前記走行道路の交通情報を取得し、
前記判定手段は、前記交通情報に基づいて前記車両の前方が渋滞しているか否かを判定し、渋滞していると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項3】
請求項1または2に記載の車両制御装置において、
前記情報取得手段は、前記走行道路の地図情報を取得し、
前記判定手段は、前記地図情報に基づいて前記車両の前方に一時停止すべき交差点があるか否かを判定し、一時停止すべき交差点があると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
前記情報取得手段は、前記走行道路において前記車両の前方を走行している先行車両までの車間距離情報を取得し、
前記判定手段は、前記車間距離情報に基づいて前記車両から前記先行車両までの車間距離が所定値以下であるか否かを判定し、所定値以下であると判定したときに、前記車両の急加速を禁止すべきと判定することを特徴とする車両制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両制御装置において、
前記制御手段は、前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両のエンジン回転数を制限するための制御を前記車両の変速機に対して行うことを特徴とする車両制御装置。
【請求項6】
車両を設定された目的地まで案内するための制御を行うナビゲーション装置であって、
前記車両の走行道路に関する情報として、前記走行道路の交通情報、前記走行道路の地図情報、および前記走行道路において前記車両の前方を走行している先行車両までの車間距離情報のいずれか少なくとも1つを取得する情報取得手段と、
前記情報取得手段により取得された情報に基づいて、前記車両の前方が渋滞しているか否か、前記車両の前方に一時停止すべき交差点があるか否か、および前記車両から前記先行車両までの車間距離が所定値以下であるか否かのいずれか少なくとも1つを判定することにより、前記車両の急加速を禁止すべきか否かを判定する判定手段と、
前記判定手段により前記車両の急加速を禁止すべきと判定されたときに、前記車両の急加速を禁止するための信号を出力する信号出力手段とを備えることを特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置と、
前記信号出力手段により出力された信号に応じて、前記車両のエンジンを制御するエンジン制御装置とを備えることを特徴とする車両制御システム。
【請求項8】
請求項7に記載の車両制御システムにおいて、
前記信号出力手段により出力された信号に応じて、前記車両の変速機を制御する変速機制御装置をさらに備えることを特徴とする車両制御システム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−190610(P2009−190610A)
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2008−34360(P2008−34360)
【出願日】平成20年2月15日(2008.2.15)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成20年2月15日(2008.2.15)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]