
Fターム[3D041AE02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853)
Fターム[3D041AE02]の下位に属するFターム
機関軸回転数、出力 (924)
スロットル弁開度 (515)
気筒数 (7)
燃料供給、燃料噴射 (272)
点火時期 (105)
過給圧 (9)
エンジンブレーキ (63)
アクセルペダル、レバー (167)
Fターム[3D041AE02]に分類される特許
141 - 160 / 791
作業機
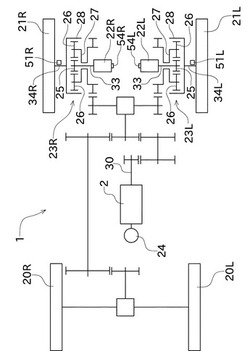
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、電動モータ22と、差動装置23と、後車輪21と、制御部と、を備えている。差動装置23は、エンジン2の出力と電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度を制御する。また、エンジン2の出力は略一定とされる。そして、車体の前進時において、制御部はエンジン2の駆動力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
車両運動制御システム

【課題】旋回運動の安定化制御の干渉を防止できる車両運動制御システムを低コストで提供することを目的とする。
【解決手段】車両運動制御システムは、駆動輪である左右前輪に異なる駆動力を配分することにより車両にヨーモーメントを発生させる左右駆動力配分装置と、車両の転舵輪である前輪の向きを変更する操向ハンドルの操作角θHに応じて後輪のトー角を変更する後輪トー角制御装置と、を少なくとも備える。左右駆動力配分装置は左右駆動力配分制御ECU37を有し、フィードフォワード部71とフィードバック制御部73と駆動力配分量制御状態モニタ部75を有している。駆動力配分量制御状態モニタ部75が、車両の旋回方向のヨーレイトを増加させる方向に作動しているときには、後輪トー角制御ECU36における第2補正部67は、操向ハンドルの操作角θHの向きと逆相に後輪のトー角を制御しない。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン運転モードの切り替え時、要求駆動トルクを実現しつつ、エンジントルクの増減に伴うトルク変動が駆動輪へ伝達するのを抑制し、段差ショックの発生を防止することができるハイブリッド車両の制御装置を提供すること。
【解決手段】駆動系に、運転モード切り替え装置を有するエンジンEngと、モータジェネレータMGと、第1クラッチCL1と、第2クラッチCL2と、を備えている。このハイブリッド車両において、運転モード切り替え制御手段(図2)は、通常運転モードから燃費運転モードへの切り替え時、第2クラッチCL2のトルク伝達容量を、要求駆動トルク相当まで低下させ、モータジェネレータMGにより回転速度差を保つスリップ締結制御を行い、燃費運転モードから出力燃費運転モードへの切り替え時、第1クラッチCL1のトルク伝達容量を、要求駆動トルク相当まで低下させ、モータジェネレータMGにより要求駆動トルクの増減を調整する制御を行う。
(もっと読む)
車両走行制御装置
【課題】運転者の意図に沿った車両の走行制御が可能な車両走行制御装置を提供する。
【解決手段】車両走行制御装置は、車両の現在地から目的地までの走行ルートR1を複数の走行区間r11〜r14に任意に分割し、その分割した各走行区間r11〜r14に対して走行制御用パラメータを設定し、車両Sが走行区間r11〜r14に進入した場合に、走行区間r11〜r14に対して設定されている走行制御用パラメータに基づいて車両の走行を制御する。
(もっと読む)
青色光線衝突防止装置
【課題】地下駐車場や深夜の街灯の無い駐車場で、自動車を前進又は後退させる時に、目視では車の前方、後方が確認できない時に、ブレーキとアクセルを踏み間違えることを防止する。
【解決手段】自動車の前方および後方に青色光線の発射器2、受光器3を備えておき、障害物8により当たり反射して帰って来た青色光線を受光したした時に急ブレーキをかけ、同時にリレー5を動作させエンジンのイグニッションコイルへ供給する電源を切り車を急停車させる。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】変速時に運転者に違和感を与えることのないハイブリッド車両の変速制御装置を提供する。
【解決手段】第1回転要素にエンジンが接続され、第2回転要素に第1モータジェネレータが接続され、第3回転要素に駆動軸が接続された動力分配装置と、前記駆動軸に駆動力を伝達する第2モータジェネレータと、前記駆動軸と前記第2モータジェネレータとの間に介在され、変速時にクラッチを解放する有段式の変速機と、前記第1モータジェネレータ及び第2モータジェネレータとの間で充放電を行うバッテリと、を備え、バッテリに充電制限がかかっているときに変速機の変速要求があるときは、変速前にエンジン及び第1モータジェネレータの分担トルクを低下させ、第2モータジェネレータの分担トルクを上昇させ、その後、前期クラッチを開放して変速を行う変速制御手段を備えた。
(もっと読む)
電動車両の旋回補助装置
【課題】旋回応答性を確保しつつ車両のタイヤ磨耗を効果的に低減できる電動車両の旋回補助装置を提供すること。
【解決手段】操舵輪101,102の操舵角を調節するハンドル108と、操舵角に基づいて目標車輪スリップ角を算出する目標車輪スリップ角算出手段151と、車両状態量を検出する車両状態検出手段と、車両状態量に基づいて実車体スリップ角を算出する実車体スリップ角算出手段152と、実車体スリップ角と操舵角に基づいて実車輪スリップ角を算出する実車輪スリップ角算出手段153と、目標車輪スリップ角と実車輪スリップ角の差分から必要ヨーモーメントを算出する必要ヨーモーメント算出手段154と、必要ヨーモーメントを発生させるためのトルク補正量を算出するトルク補正量算出手段155とを備え、モータ105,106によって、トルク補正量に基づいて補正されたトルクを駆動輪103,104に個別に与える。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、車両重心点P周りに最大ヨーモーメントMを発生させるように、車両Veの駆動トルクが制御されるとともに、最適な操舵角θが操舵輪に与えられるように構成されている。アッカーマンステアリングジオメトリが考慮されて駆動輪が出力する駆動トルクが制御され、また、最適な操舵角θが与えられるので、車両Veの最小旋回半径を低減させることができる。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】変速部と電動機とを備える車両用動力伝達装置において、変速ショックの低減と燃費向上とを両立させつつドライバビリティの低下を抑制する。
【解決手段】コースト走行中の第2電動機M2による回生時に自動変速部20のダウンシフトを実行する際は単一変速又は飛び変速により実行されるので、例えば第2電動機M2による回生中には燃費が向上させられる。特に、飛び変速時には単一変速時に比べて燃費が一層向上させられる。また、変速ショックが増大する可能性の高い低作動油温時には、単一変速時に比べて元々変速ショックが生じ易い飛び変速が禁止されるので、変速ショックが増大してしまうことが回避される。
(もっと読む)
動作特性モード制御装置及び動作特性モード制御方法
【課題】車両の動作特性モードを設定した際に、車両の挙動が予期しない状態となることを抑制することが可能な動作特性モード制御装置及び動作特性モード制御方法を提供する。
【解決手段】本発明では、動作特性モード設定手段は、設定した動作特性モードに応じた制御指令を複数の挙動制御手段のそれぞれに対して出力する。そして、複数の挙動制御手段のそれぞれは、動作特性モード設定手段が出力した制御指令に係る動作特性モードによる制御を実行可能な場合、該動作制御モードを設定する。そして、動作特性モード設定手段は、いずれかの挙動制御手段が設定している動作特性モードが自己が設定している動作特性モードと一致していないと判定した場合、設定している動作特性モードと異なる他の動作特性モードを新たに設定する。
(もっと読む)
情報処理装置、及び車両
【課題】性能の異なる駆動モータを有する車両間で追従走行を良好に行う。
【解決手段】先行車両2と追従車両3は、出力マップをそれぞれ保持している。先行車両2は、追従車両3が追従走行を行う前に、追従車両3から出力マップを送信してもらう。そして、先行車両2は、これを自車両の出力マップと合成して、先行車両2と追従車両3の何れの車両の駆動モータでも出力しうる仮想のマップであるエミュレーションマップを生成し、自車両でこれを保持すると共に追従車両3にも送信する。先行車両2と追従車両3は、エミュレーションマップに従った出力を行うような制御系を有しており、この制御系を駆動モータに対する指令の出力の直前に作用させることで、先行車両2と追従車両3の駆動モータの性能差を調整し、良好な追従走行を行うことができる。
(もっと読む)
車両の駆動力制御装置
【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
電気自動車の制御装置
【課題】 失陥していない電動モータにより車両の走行を継続できる電気自動車の制御装置を提供する。
【解決手段】 目標駆動力生成部16は、モータの一方が失陥した場合、車両の加速を禁止するフェールセーフ制御を実施し、フェールセーフ制御中に車両が安定走行状態となった場合には、車両の加速を許可するリンプホーム制御へ移行する。
(もっと読む)
前後加速度制御装置
【課題】外乱によるフィードフォワード制御の精度低下を補完し、前後加速度制御性能を向上させる。
【解決手段】パワトレフィードフォワードトルクの信頼性が外乱要因による推定ブレーキトルクの信頼度の低下に伴って低下するため、パワトレフィードバックトルクをブレーキ信頼性を加味したパワトレトルクの信頼度に応じて補正する。また、ブレーキフィードフォワードトルクの信頼性が外乱要因による推定パワトレトルクの信頼度の低下に伴って低下するため、ブレーキフィードバックトルクをパワトレ信頼性を加味したブレーキトルクの信頼度に応じて補正する。これらにより、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクの信頼性の低下分をパワトレフィードバックトルクもしくはブレーキフィードバックトルクの補正によって補完することが可能となる。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
車両
【課題】先行車両に対して安定した並走追従走行をすること。
【解決手段】追従車両3は、前後方向の制御と左右方向の制御を行うことにより、先行車両2に対して並走追従走行を行う。前後方向の制御は、フィードバック制御と、フィードフォワード制御を行う。フィードフォワード制御では、先行車両2から送信されてくる目標車速を、先行車両2が旋回する際に、追従車両3が先行車両2の内外周を走行することによる速度の増減で補正した値を用いる。左右方向の制御では、方位角φと相対角θを収束させる。この際に、追従車両3は、自車両の代表点7から先行車両2に対する目標点5までの目標点距離Δmを用いて、φとθの何れを優先的に制御するかを判断する。更に、目標点距離Δmが小さい場合、即ち、追従車両3と先行車両2が近接している場合には、φを制御する際のゲインを小さくする。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】オートクルーズ制御がオンの状態で、ブレーキ操作を行わなくてもカーブ路を走行できるか否かの情報をユーザに提供する。
【解決手段】道路情報を取得し、取得した道路情報、および、定速走行制御時の一定速度に基づいて、定速走行制御中に一定速度でカーブ路を走行する際に必要となる必要旋回ヨーモーメントを算出するとともに、定速走行制御中に一定速度でカーブ路を走行する際に、車両が走行可能な限界ヨーモーメントを算出する。そして、車両がカーブ路に進入する前に、必要旋回ヨーモーメント65および限界ヨーモーメント64を、表示装置に表示させる。
(もっと読む)
変速制御装置およびそれを備えた自動二輪車
【課題】手動モード運転と自動モード運転とを切換可能な自動二輪車において、リンプホーム性を向上させる。
【解決手段】変速制御装置50は、有段のドグクラッチ式のシフト機構43と、シフト機構43のギアポジションを変更するシフトアクチュエータ70と、クラッチ44と、クラッチアクチュエータ60と、運転者によって操作され、シフトアクチュエータ70およびクラッチアクチュエータ60によるシフト機構43のギアポジションの変更を指示するシフトスイッチ72と、運転者によって操作され、手動モード運転と自動モード運転とを切り換えるモード切換スイッチ71と、ECU90とを備えている。ECU90は、所定の故障時に、自動モード運転を規制しかつ手動モード運転を許可する運転許可部93を有している。
(もっと読む)
141 - 160 / 791
[ Back to top ]