
Fターム[3D041AE02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853)
Fターム[3D041AE02]の下位に属するFターム
機関軸回転数、出力 (924)
スロットル弁開度 (515)
気筒数 (7)
燃料供給、燃料噴射 (272)
点火時期 (105)
過給圧 (9)
エンジンブレーキ (63)
アクセルペダル、レバー (167)
Fターム[3D041AE02]に分類される特許
81 - 100 / 791
車両用自動変速機の制御装置
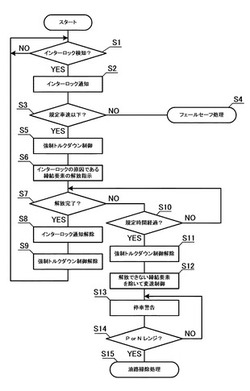
【課題】インターロック状態の締結要素を解放するときに車両を減速させて、締結要素の解放を行い易くする。
【解決手段】複数の摩擦係合要素を油圧により選択的に締結して変速段を切り換える自動変速機の制御装置であって、摩擦係合要素のうちの締結させた締結要素のインターロック状態を検知するインターロック検知手段(S1)と、車速を検知する車両状態検知手段(S3)と、インターロック検知手段がインターロック状態を検知したときに、車両状態検知手段により検知される車速を判断し、車速が規定車速以下の場合に、エンジントルクをダウンさせるトルクダウン制御手段(S5)と、を含んで構成される。
(もっと読む)
走行制御装置

【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車両の制御装置
【課題】時系列で設定した目標加速度に対する追従制御を行う際に、ロックアップクラッチ13の作動時とロックアップクラッチ13の作動不可時との間の挙動差を抑制乃至無くす。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、実加速度が目標加速度に追従するようにエンジン出力を制御するエンジン出力制御部21と、変速制御部22と、ロックアップクラッチ13を作動不可状態を検出する作動不可検出部27とを備える。ロックアップクラッチ13の作動が不可能なときのアクセル踏み込み操作時には、目標加速度設定部23は、予め設定されている、ロックアップクラッチの作動状態での時系列の規範加速度を目標加速度にする。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
車両制御システム
【課題】自動的に動力源の運転を停止および再開させる場合の燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】車両の動力源が車両の駆動輪によって回転駆動されるときの駆動輪に作用する動力源による負荷の大きさを変更可能な負荷変更手段と、負荷変更手段を制御する制御装置とを備え、制御装置は、車両の走行時に動力源による動力の発生を停止させる動力源停止制御を実行可能であり、制御装置は、動力源停止制御が実行され、かつ動力源が駆動輪によって回転駆動されている間に、運転者による制動操作の終了が検出され、制動操作の終了の検出後に運転者による加速操作の開始が検出された(S1−Y)ときに、制動操作の終了から加速操作の開始までの経過時間が予め定められた所定時間以上である(S2−Y)と、動力源による動力の発生を再開させることなく、負荷変更手段によって負荷の大きさを減少させる(S3)。
(もっと読む)
駆動制御装置
【課題】車両の制御に起因する運転者の違和感を低減する。
【解決手段】駆動制御手段(100)は、車両(1)に搭載され、車両の走行状態に係る情報である走行状態情報を、車両が走行している位置に係る情報である位置情報に関連付けて学習する学習手段(12)と、学習された走行状態情報に応じて、学習された走行状態情報を車両の駆動制御に用いる際の度合いを決定する決定手段(15)とを備える。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
走行制御装置および走行制御方法
【課題】複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】パターン走行部RT1は、経路パターンPT1〜PT10に対応する走行経路ごとに区切られセクションが設定される。走行制御装置100は、車両1にパターン走行部RT1を自律走行させる場合、車両1に各セクションを第1セクションから順番に、セクション単位で走行させる。よって、車両1が現在走行しているセクションと、他のセクションとが接近していたり、交差している場合でも、車両1が他のセクションを走行し始めることがないので、車両1に現在走行中のセクションを継続して走行させることができる。従って、複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる。
(もっと読む)
動力伝達装置
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
車両制御システム
【課題】運転者に違和感を与えることを抑制することができる車両制御システムを提供すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン4、ロックアップクラッチ51、自動変速機52)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御するECU6とを備える。ECU6は、アクセル開度Paと車速vとに基づいた要求加速度に基づいてエンジン4を制御するとともに、アクセル開度Paおよび車速vに基づいた目標クラッチ状態Loおよび目標変速比γoに基づいてロックアップクラッチ51および自動変速機52を制御する。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
ハイブリッド車両
【課題】電動駆動時の変速段の選択の自由度と、ハイブリッド駆動時における変速段のプレシフトの自由度を高めることができるハイブリッド車両を提供する。
【解決手段】第1入力軸13と第2入力軸14を差動歯車装置25のキャリア20と第1サンギヤ21にそれぞれ結合し、第2入力軸14にモータジェネレータ2を結合する。エンジン1と第1入力軸13の間にクラッチCL1を介在させ、エンジン1と第2入力軸14の間、エンジン1と第2サンギヤ22の間にクラッチCL2,CL3を介在させる。第1入力軸13と出力軸15,16の間に1速,5速ギヤ列40,41を選択可能に設け、第2入力軸13と出力軸15,16の間に3速,7速ギヤ列44,45を選択可能に設ける。偶数の変速段は第1入力軸13側のギヤ列と第2入力軸14側のギヤ列を出力軸15,16に同時に接続し、その状態でクラッチCL3を接続して得る。
(もっと読む)
ハイブリッド自動車の変速制御装置
【課題】ハイブリッド自動車の変速制御装置に関し、電動機を利用した走行中の変速時に、電動機の駆動タイミングを早め且つ回転合わせ制御上の不具合を回避できるようにする。
【解決手段】変速要求が検出されると、主クラッチ4及び副クラッチ22を切断した上で、変速制御手段40dにより所望の変速段への変速を行なうと共に、同期制御手段40fにより内燃機関回転速度を変速機入力軸の回転速度に同期させ且つ電動機回転速度を変速機従動軸の回転速度に同期させてから、主クラッチ及び副クラッチを同時に接続指令するように制御する。また、変速完了期に、主クラッチ4の接続が達成されたら、内燃機関2の出力トルクを要求トルクに基づくトルクに復帰させ、このとき、副クラッチ22の接続が達成されなければ、電動機30の回転速度を変速機6の従動軸の回転速度に同期させる制御に、トルク変化又は車速変化に応じた補正制御を加える。
(もっと読む)
ハイブリッド自動車の変速制御装置
【課題】トランスミッションに装備した動力取出軸と電動機とを接続したハイブリッド自動車の変速制御装置に関し、電動機を利用した走行中のトランスミッションの変速時に、電動機の駆動タイミングを早めることができるようにする。
【解決手段】変速要求が検出されると、主クラッチ4及び副クラッチ22を切断した上で、変速制御手段40dにより所望の変速段への変速を行なうと共に、同期制御手段40fにより内燃機関回転速度を変速機入力軸の回転速度に同期させ且つ電動機回転速度を変速機従動軸の回転速度に同期させてから、クラッチ制御手段40eにより主クラッチ4及び副クラッチ22を同時に接続するように変速制御手段40dにより制御する。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
作業車両の走行駆動装置
【課題】走行安定性及び不整地での走行性能を良好に確保しつつ、動力伝達効率を高め、燃費の改善を実施上有効に図り得る作業車両の走行駆動装置を提供する。
【解決手段】走行駆動装置は、エンジン1により駆動される油圧ポンプ11とこの油圧ポンプの吐出圧油により駆動される油圧モータ12とを有してなる油圧式動力伝達部10と、エンジンにより駆動される発電機21、バッテリ22やキャパシタなどの蓄電装置又はその両方からなる電力供給源と、この電力供給源から供給される電力により駆動される電動機25と、この電動機の出力と上記油圧式動力伝達部の油圧モータの出力とを合わせて車軸33に伝達する合力伝達部30とを備える。
(もっと読む)
81 - 100 / 791
[ Back to top ]