
Fターム[3D046HH21]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543)
Fターム[3D046HH21]の下位に属するFターム
Fターム[3D046HH21]に分類される特許
121 - 140 / 384
車両の運動制御装置
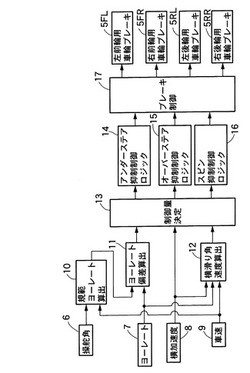
【課題】ヨーレート偏差に基づくアンダーステア抑制および横滑り角速度に基づくスピン抑制制御をともに実行可能とするとともに、コントロール性の向上を図る。
【解決手段】制御量決定手段13は、規範ヨーレートの絶対値が検出ヨーレートの絶対値よりも設定値以上大きい第1の状態ではヨーレート偏差に基づいて車両に旋回内向きのモーメントを発生させるように選択されたアクチュエータの第1の制御量を決定し、横滑り角速度が所定値を超える第2の状態では前記横滑り角速度に基づいて車両に旋回外向きのモーメントを発生させるように選択されたアクチュエータの第2の制御量を決定し、第1および第2の状態が同時に発生しているときには第1および第2の協調制御用制御量の絶対値のうち大きい方の値が対象とするアクチュエータを選択するとともに選択されたアクチュエータの制御量を第1および第2の協調制御用制御量の合算値として決定する。
(もっと読む)
運転支援装置

【課題】接触回避動作の実行以後での自車両の姿勢状態を適切な状態に設定する。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容(例えば、減速制御時の減速度等)の少なくとも何れかを設定可能である。走行制御部26は、接触回避動作の実行に応じて自車両の姿勢状態が変化した場合には、姿勢戻し制御を実行し、EPSアクチュエータ17による自車両の操舵機構の操向動作によって、自車両の姿勢状態が、例えば接触回避動作の実行開始前後の所定期間内において車両状態センサ16により検出された自車両の姿勢状態に応じた所定の目標状態となるように制御する。
(もっと読む)
車両用走行制御装置
【課題】運転者のブレーキ操作がない状態で制動力を多用するときに、制動機構のフェード傾向を運転者に認識させて、その抑制を促す。
【解決手段】運転者のブレーキ操作がない状態で自動ブレーキを作動させる頻度に応じてフェード警報を運転者に報知する。すなわち、自動ブレーキを作動させた回数をカウントし(ステップS32、S33)、カウントした回数が所定値を超えたときに(ステップS36の判定が“Yes”)、警報装置9によってフェード警報を運転者に報知する(ステップS39)。また、自動ブレーキがON/OFFを繰返すようなハンチングによって、不必要にカウント数が増加することがないように、同一旋回中であれば自動ブレーキを作動させた回数が2回以上であっても1回としてカウントする(ステップS22〜S28、S32、S33)。
(もっと読む)
自動車の操縦性制御装置
【課題】アクティブサスペンション装置が故障した際にも旋回安定性を確保することのできる操縦性制御装置を提供する。
【解決手段】アクチュエータで駆動されるアクティブサスペンション装置が少なくとも後車輪に設けられた自動車において、制動力または駆動力の少なくともいずれか一方を制御してアンダーステア傾向を抑制させる旋回特性制御手段と、アクティブサスペンション装置の異常の有無を判別する故障診断手段とを有するものとし、アクティブサスペンション装置が異常と判断されたときは、アンダーステア抑制効力を通常時よりも大きくする。
(もっと読む)
運転支援装置
【課題】接触回避動作の実行以後での自車両の姿勢状態を適切な状態に設定する。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容(例えば、減速制御時の減速度等)の少なくとも何れかを設定可能である。走行制御部26は、接触回避動作の実行に応じて自車両の姿勢状態が変化した場合には、姿勢戻し制御を実行し、EPSアクチュエータ17による自車両の操舵機構の操向動作によって、自車両の姿勢状態が、例えば自車両の進行方向前方に存在する他車両の車両状態(例えば、姿勢状態や進行方向や走行軌跡等)に基づき設定される姿勢状態に応じた所定の目標状態となるように制御する。
(もっと読む)
車体姿勢制御装置
【課題】車両の旋回時におけるローリングとピッチングとを共に制御し得る車体姿勢制御装置を得る。
【解決手段】ロール角取得部により取得された車体6のロール角を適切な大きさに抑制するロール制御部と、ロール角に応じて車体のピッチ角を制御するロール角対応ピッチ角制御部とを設ける。ロール制御部を、ショックアブソーバ28の減衰特性の制御によりローリングを抑制する減衰特性依拠ロール制御部とし、ロール角対応ピッチ角制御部を、過渡旋回状態においては、ショックアブソーバ28の減衰特性の制御により、定常旋回状態においては、ブレーキ制御ECU20による前後加速度の制御により、それぞれピッチ角を制御するものとする。ロール角対応ピッチ角制御部を、過渡旋回状態および定常旋回状態の両方において前後加速度の制御によりピッチ角を制御するものとすることもできる。
(もっと読む)
シートベルト装置
【課題】旋回制御措置の作動時にプリテンショナ機構を作動させるシートベルト装置において、プリテンショナ機構を頻繁に作動させて乗員に違和感を与えることを防止する。
【解決手段】ウエビング2aに所定の第1張力を付与する第1プリテンショナ機構2cと、第1プリテンショナ機構2cを作動させるプリテンショナコントローラ9とを備えたシートベルト装置2であって、車両Vの旋回時にその走行状態を安定させるために少なくともブレーキ装置3のブレーキ力を制御して車両の走行状態を制御するDSCコントローラ7と、DSCコントローラ7が作動を開始したときにそのDSC作動時間を計時するDSC作動時間計測部92とをさらに備え、プリテンショナコントローラ9は、DSCコントローラ7の作動後、DSC作動時間計測部92により計時されたDSC作動時間が所定時間を経過したときに第1プリテンショナ機構2cを作動させる。
(もっと読む)
車両制御装置
【課題】制動状態を保持された車両が坂路をずり落ちながら姿勢変化し始めた場合に、その姿勢変化を抑制することが可能な車両制御装置を提供する。
【解決手段】制動保持制御によって制動状態が保持されているときに、坂路をずり落ちる車両の姿勢変化を検出すると(S8)、制動保持制御による制動状態の保持を解除し(S9)、さらに、車両を変化前の姿勢に戻す操舵方向にステアリングホイール(34)を回転させる(S13)。
(もっと読む)
運転支援装置
【課題】前進する際の車両の走行履歴に基づいて後退時の車両操作の支援を行うことによって、後退が困難な状況下でのより容易な車両の運転を可能とした運転支援装置を提供する。
【解決手段】車両2が細街路又は駐車場内に進入した際に、後方カメラ3で撮像した撮像画像50から障害物の特徴点60を検出するとともに検出結果に基づいて車両2の走行軌跡75を検出して保存し(S2〜S5)、車両2が細街路又は駐車場内で後退を行う際には、保存された走行軌跡75に沿って車両2が後退すべく車両の制御を行う(S17)ように構成する。
(もっと読む)
車両制御装置
【課題】制動状態を保持された車両が坂路をずり落ちながら姿勢変化し始めた場合にその車両の姿勢変化を抑制することが可能で、かつ誤動作しにくい車両制御装置を提供する。
【解決手段】制動状態の保持が行なわれているときに(S5)、坂路をずり落ちる車両の姿勢変化を検出すると(S4)、制動保持制御による制動状態の保持を解除する(S10)。また、制動保持制御によって制動状態の保持が行なわれているときに(S5)、ドライバによるステアリング操作を検出すると(S6)、坂路をずり落ちる車両の姿勢変化の検出感度を高くする(S9)。
(もっと読む)
車両の運動制御装置
【課題】演算負荷が少なく適切に安定化制御を行い得る車両の運動制御装置を提供する。
【解決手段】目標ヨーモーメント及び一つの車輪TRの動荷重に基づき当該車輪に対する媒介変数(θ)を演算し、この媒介変数及び当該車輪の動荷重に基づき当該車輪に対する目標液圧を演算すると共に、媒介変数及び車両状態量に基づき当該車輪に対する目標スリップ率を演算し、これら目標スリップ率及び目標液圧に基づき当該車輪に対する制動力を制御する。例えば、低摩擦係数路面では目標スリップ率に基づき当該車輪に対する制動力を制御し、高摩擦係数路面では目標液圧に基づき当該車輪に対する制動力を制御する。
(もっと読む)
車線逸脱防止装置
【課題】自車両が停止を要する走行シーンを考慮して車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS3、ステップS4)、自車両の制動力を制御して走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行う(ステップS7〜ステップS11)。ここで、自車両の停止の必要性が高いエリアまでの距離情報を検出し(ステップS6)、その検出した距離情報に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS11)。
(もっと読む)
車両の横転危険度判定装置
【課題】大きな記憶容量を必要とすることなく、車両状態に応じて連続的に横転危険度を判定することが可能な車両の横転危険度判定装置を提供する。
【解決手段】車両のロール角と車両のロール角速度の関係を示す二次元マップ上に設定した横転危険領域(R2L,R2R)と安定領域(R1)とを区分する境界線(T1,T2)から、ロール角(X1)とロール角速度(Y1)によって該二次元マップ上において特定される点(S)までの距離を算出し、点(S)が、該境界線に対して該横転危険領域側に在るか又は該安定領域側に在るかに応じた極性を該距離に付す。そして、該極性を付した距離に基づき横転危険度を算出して出力する。或いは、該極性を付した距離(例えばL1)から、点(S)の境界線(T1)に対する移動速度(V1)を算出すると共に、距離(L1)及び移動速度(V1)を共に重み付けして点(S)が安定領域(R1)から遠ざかって横転危険領域(R2L)へ進入する危険度を算出し、これを該横転危険度として出力する。
(もっと読む)
制動力制御システム
【課題】車両の制動性能及び制動信頼性をより高めた制動力制御システムを実現する。
【解決手段】制動力制御システムは、車輪速センサ14a,14bの検出値に基づきフロント制動装置12a,12bを駆動制御するフロント演算装置16と、車輪速センサ14c,14dの検出値に基づきリア制動装置12c,12dを駆動制御するリア演算装置18とを備え、フロント演算装置16とリア演算装置18は、通信ライン20を介して相互に接続されるものとし、フロント演算装置16は、リア演算装置18の制御対象車輪に対応する車輪速センサ14c,14dの検出値に基づいた車輪速情報又は車体速度情報を通信ライン20から取得し、その取得情報に基づき自己の制御対象車輪のフロント制動装置12a,12bを駆動制御する。
(もっと読む)
車両制御装置
【課題】 走行状態制御では先行車との衝突を回避できない場合に衝突回避制御を実行する車両制御装置において、衝突回避制御が行われるような危険な状況に陥った場合に、確実に運転者の介入を促して走行の安全性を向上させる。
【解決手段】 「キャンセル」状態の時に、セットスイッチがオンされると「制御中:車間制御」状態へ遷移して車間制御を実行する。その車間制御では先行車と衝突を回避できない場合(衝突回避警報フラグXA=1)には「制御中:衝突回避警報」状態へ遷移して衝突警報を発生させ、衝突回避に必要な要求加速度が更に増大した場合(衝突回避制御フラグXC=1)には「制御中:衝突回避制御」状態へ遷移して衝突回避制御を実行する。「制御中:衝突回避制御」状態では、衝突回避制御フラグXCのリセット、又はアクセルペダルの操作が検出されると「制御中」状態内で遷移せずに、「キャンセル」状態へ遷移する。
(もっと読む)
自動車ブレーキ装置
【課題】バキュームポンプで発生させた負圧でブレーキ倍力装置を作動させて制動力を発生させる自動車ブレーキ装置において、バキュームポンプの駆動を電動モータを使わずに行って車載のバッテリに蓄えられた電力の消費低減を図ることを課題としている。
【解決手段】バキュームポンプ10とブレーキ倍力装置2を有し、前記バキュームポンプ10が回転する車軸又は車軸以外の回転軸により駆動され、そのバキュームポンプ10から供給される負圧でブレーキ倍力装置2が作動するようにした。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力を徐々に増大させる段階的な制動制御を行う。さらに、自車の重心位置の高低に応じて任意の制動パターンを自動的に選択する。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。例えば、このときに、複数段階の最初の段階よりもさらに前段に、当該最初の段階よりもさらに制動力または制動減速度が小さい注意喚起段階を設け、この注意喚起段階では、補助ブレーキを用いた制動を実行する。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、曲率半径推定部11aにより推定された、自車両の進行路の曲率半径を入力しかつ該曲率半径に基づいて、検知した障害物の所定時間後の位置を推定するとともに、その推定された曲率半径が、予め設定された所定曲率半径よりも小さいときには、該所定曲率半径に基づいて上記障害物の上記所定時間後の位置を推定する場合に、障害物の所定時間後の位置を正確に推定できるようにする。
【解決手段】上記所定曲率半径を、自車両の最小回転半径と略同じ値(特に5mが好ましい)に設定する。
(もっと読む)
移動体用対人認識システム
【課題】移動体の運転者が目視により認識できない場所に居る人を認識可能とし、人の安全性を高めることができる移動体用対人認識システムを提供する。
【解決手段】人が携帯する携帯用位置送信装置1と移動体に備えられた移動体用対人認識装置2から成り、携帯用位置送信装置1は位置情報を取得する位置情報取得装置11と、位置情報を送信する送信装置12を備え、移動体用対人認識装置2は、位置情報を取得する位置情報取得装置21と、送信装置12が送信した位置情報を受信する受信機23と、人と移動体の相対距離を算出する距離算出部24と、算出した相対距離を監視する距離監視部25と、相対距離が閾値以下になると警鳴する警鳴装置26と、移動体を減速させる減速装置27と、移動体を停止させる停止装置28と、を備える。
(もっと読む)
121 - 140 / 384
[ Back to top ]