
Fターム[3D046HH36]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車輪状態 (1,034) | 車輪速度 (926)
Fターム[3D046HH36]の下位に属するFターム
速度0 (18)
極低速
Fターム[3D046HH36]に分類される特許
21 - 40 / 908
ブレーキ装置
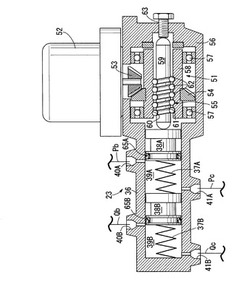
【課題】 ブレーキ液圧発生手段のピストンの初期位置を容易に調整可能にしながらピストンのロスストロークを最小限に抑える。
【解決手段】 スレーブシリンダ23のアクチュエータ51がシリンダ本体23に軸方向に進退自在に嵌合するピストン38A,38Bを初期位置から軸方向に前進駆動すると、カップシール65A,65Bがリリーフポート40A,40Bを通過した瞬間にブレーキ液圧が発生する。スレーブシリンダ23がピストン38A,38Bの軸方向の初期位置を調整するねじ部材63を備えているので、ピストン38A,38Bが作動する度にアクチュエータ51を電気的に制御して初期位置の調整を行うことなく、ピストン38A,38Bが前進を開始してからブレーキ液圧が発生するまでのピストン38A,38Bのロスストロークを最小限に抑えて制動力発生の応答性を高めることができる。
(もっと読む)
自動車およびその制御方法

【課題】トラクション制御や姿勢保持制御の実行の有無に応じたストール発進を行なう。
【解決手段】ストール発進時にトラクションコントロールか姿勢保持制御のいずれかがオンの状態のときには回転数が低く調整された通常時の目標回転数設定用マップを用いてエンジン目標回転数Ne*を設定し(S130)、トラクションコントロールも姿勢保持制御もオフの状態のときにはより大きな回転数が目標回転数Ne*に設定されるオフ時の目標回転数設定用マップを用いてエンジンの目標回転数Ne*を設定し(S140)、設定した目標回転数Ne*によりエンジンが回転すると共にアクセル開度Accに応じた要求トルクTr*が駆動軸に出力されるようエンジンとモータMG1,MG2を制御する(S150〜S210)。これにより、トラクションコントロール(TRC)や姿勢保持制御(VSC)の実行の有無に応じたストール発進を行なうことができる。
(もっと読む)
ブレーキ制御装置
【課題】車両の様々な状態を考慮して、パーキングブレーキ作動部材の操作力を確実に軽減させる。
【解決手段】ブレーキ制御装置200において、車輪速センサ96は車両80の速度を検出し、ブレーキ温度推定部は、検出された車両80の速度を利用してブレーキパッドおよびディスクロータの温度を推定する。ECU70は、パーキングブレーキレバー93の作動が検出された場合に、推定されたブレーキパッドおよびディスクロータの温度に応じた圧力に、ホイールシリンダ88の作動液の液圧であるホイールシリンダ圧を増圧させる。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動制御の精度および運転性を向上させることができる車両の挙動制御装置を提供すること。
【解決手段】挙動制御装置1は、ECU2を備える。ECU2は、車体スリップ角βを算出し(ステップ2)、目標スリップ角βrを算出し(ステップ3)、車体スリップ角βを目標スリップ角βrに収束させるように、目標車輪速Ws_cmdを算出し(ステップ4)、車体スリップ角βの目標スリップ角βrへの収束速度を決定する切換関数設定パラメータVPOLEを、車体スリップ角βに応じて設定する(ステップ31〜35)とともに、所定期間中でのβ≧βrの発生頻度に応じて、目標スリップ角βrを変更する(ステップ19〜21)。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材に設けた副操作部材の操作でヨーモーメント発生装置の作動を制御するものにおいて、副操作部材が出力する指令信号のノイズの影響を低減する。
【解決手段】 運転者がステアリングホイール7に設けたグリップ9L,9Rを操作すると、そのグリップ9L,9Rの操作に応じてヨーモーメント発生装置が車両のヨーモーメントを変化させるので、ステアリングホイール7を操作して車両の運動状態を制御するのと同時並行して、車両の旋回を補助あるいは抑制することができる。このとき車速の増加に応じてグリップ9L,9Rの操作量に対するヨーモーメントの変化量を変更するので、運転者によるステアリングホイール7の保持力や操作力が増加するためにグリップ9L,9Rの操作にノイズが乗り易くなっても、そのノイズの影響を最小限に抑えてヨーモーメント発生装置が不適切なヨーモーメントを発生するのを防止することができる。
(もっと読む)
車両の制動制御装置
【課題】センターデファレンシャルを搭載している車両を含めた直結4輪駆動状態となる駆動状態モードを有する車両について、車両が直結4輪駆動状態となったときでも、車両の挙動を安定させる制動制御を行うことができる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車両の挙動を安定させる制動制御を行う制動制御装置80であって、
前記車両の駆動状態を切り替える駆動状態切替手段60と、
前記車両のスリップ状態を検出するスリップ状態検出手段10と、
前記制動制御の作動許可を判定する制動制御許可判定手段30とを備え、
前記制動制御許可判定手段は、前記駆動状態切替手段により前記車両が直結4輪駆動状態とされたときには、前記スリップ状態検出手段により検出されたスリップ状態が所定のスリップ状態を越えたときに、前記制動制御の作動許可を行うことを特徴とする。
(もっと読む)
車両用制動装置
【課題】車両用制動装置において、構造の簡素化並びに製造コストの低減を図る。
【解決手段】シリンダ12内に入力ピストン13と加圧ピストン14を移動自在に支持することで第1圧力室R1と第2圧力室R2と第3圧力室R3を区画すると共に、第2圧力室R2と第3圧力室R3を連通路28により連通し、ECU81は、第1、第2リニア弁38,44が調圧した制御油圧を第3圧力室R3から第2圧力室R2に作用させることで、加圧ピストン14をアシストして第1圧力室R1から制動油圧を出力可能とし、シリンダ11内に入力ピストン13の前進に応じて容積が減少する反力室R4を設けると共に、入力ピストン13内に反力室R4の容積減少に応じて変形することで入力ピストン13を介してブレーキペダル17に対して操作反力を付与可能な反力付与機構51を設ける。
(もっと読む)
摩擦状態推定装置、自動車および摩擦状態推定方法
【課題】車輪と路面との間における摩擦状態をより正確に推定すること。
【解決手段】摩擦状態推定手段が、ブレーキパッドに印加される圧力と車輪の回転状態との関係、あるいは、ナックルとブレーキキャリパとの締結部に生じる歪みの少なくとも何れかを示す物理量に基づいて、車輪の摩擦状態(安定/不安定)を判定する。したがって、車輪と路面との間における摩擦状態をより正確に推定することができる。
(もっと読む)
車両の挙動制御装置
【課題】運転者の技量に合わせて適切な時期に制御を開始するよう構成された旋回中の車両のヨー方向の挙動を修正するための車両挙動制御装置を提供すること。
【解決手段】本発明の車両挙動制御装置は、車両のいずれかの車輪のグリップ力が限界を越えていることを検出する手段と、車両のいずれかの車輪のグリップ力が限界を越えたことが検出された時点から待機時間の経過後に挙動制御が必要であるか否かを判定する手段とを含み、挙動制御が必要であると判定されたときに挙動制御の実行を開始することを特徴とする。挙動制御が必要か否かは、現在の時点から所定の予測時間が経過したときの車両がスピン状態になるか否かを予測することにより行う。
(もっと読む)
車両状態判定装置
【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
制動力制御装置
【課題】車両停止時の揺れ戻りを低減させる揺れ戻り防止制御において、運転者の運転技量と無関係に制動力が低下されることを防止すること。
【解決手段】運転者によるブレーキペダル5の操作量を検出し、検出された操作量に基づいて運転者の制動特性を学習する。車両停止前に制動力を減少させる揺れ戻り防止制御において、学習した制動特性に基づいて制動力を制御することで、運転者の運転技量に合わせて、精度良く制動力を制御することができる。これにより、運転者の運転技量と無関係に制動力を低下させることが無く、減速度不足、停止距離の延長を防止することができる。
(もっと読む)
タイヤ接地状態推定方法、タイヤ接地状態推定装置、タイヤ、及び、車輌制御装置
【課題】簡単な構成で走行中のタイヤの接地状態を精度よく推定することができるとともに、路面変化に対する追従性の高いタイヤの接地状態推定方法とその装置、タイヤの接地状態の推定に用いられるタイヤ、及び、車輌制御装置を提供する。
【解決手段】加速度センサ11をタイヤの赤道部近傍のブロック23B内部に、その検出方向がタイヤ回転方向になるように埋設するとともに、上記加速度センサ11の検出出力から蹴り出し時における上記ブロック23Bのタイヤ回転方向の振動波形を抽出し、この振動波形正側のピーク値Gの大きさに基づいて走行中のタイヤの接地状態を推定するようにした。
(もっと読む)
加速度演算装置および電気式動力舵取装置
【課題】加速度センサを用いることなく車両の前後方向の加速度を正確に演算し得る加速度演算装置および電気式動力舵取装置を提供する。
【解決手段】駆動輪である右前輪FR、左前輪FLの各原車輪速度を検出する車輪速度センサFRs、FLsと、従動輪である右後輪RR、左後輪RLの各原車輪速度を検出する車輪速度センサRRs、RLsとを備えて、ABS制御中であると判定された場合、全ての車輪(FR、FL、RR、RL)の各車輪速度(規制後車輪速度V1fr、V1fl、V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算し、ABS制御中でないと判定された場合、従動輪(RR、RL)の各車輪速度(規制後車輪速度V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算する。そして、このように演算される車両速度Vspdに基づき車両の前後加速度Gsを演算する。
(もっと読む)
車両の運動制御装置の支持構造
【課題】車両の運動制御装置の支持構造において、様々な方向の振動に対してバランスのよい入力振動減衰特性および振動伝達抑制特性を得ることができるようにして、車両の運動制御装置における車両挙動の検出精度を向上させる。
【解決手段】車両の各ホイールシリンダに付与される液圧を個別に制御するための複数の液圧機器を搭載した液圧ユニット21と、車両の挙動を検出する車両挙動センサが設けられているとともに液圧ユニット21を制御するコントロールユニット22と、が一体化されてなる車両の運動制御装置13を、車両Mの車体Bに固定されたブラケット70に3つの支持弾性部材81〜83を介して支持する車両の運動制御装置の支持構造であって、支持弾性部材81〜83の各支持方向は、3次元座標系の3つの座標軸と平行である三方向である。
(もっと読む)
車両のブレーキ制御方法およびブレーキ装置
【課題】直進時だけでなく、旋回時でもアンチロック制御に入るタイミングの判断を正確にできる電動式パーキングブレーキによるブレーキ制御方法およびブレーキ装置を提供する。
【解決手段】車両11の走行中に、モータ駆動のパーキングブレーキ装置16でブレーキを掛けるブレーキ制御方法であって、ブレーキを掛ける方向にモータを回転させると共に、左側の前後の車輪速(FL、RL)の差(ΔL)と右側の前後の車輪速(FR、RR)の差(ΔR)の和(ΔL+ΔR)を求め、この値がしきい値より大であるときにブレーキを解除する方向にモータを回転させ、しきい値と同一か小であるときにブレーキを掛ける方向にモータを回転させる。
(もっと読む)
車輪情報取得装置および車両制御装置
【課題】車輪に作用する加速度情報から得られる情報を精度よく取得可能とする。
【解決手段】車輪側装置は、車輪14の加速度を検出する加速度センサ68と、その加速度センサ68による検出情報を含む車輪情報を送信可能なTPMS送信機とを収容したケース62を有し、そのケース62が車輪14を構成するタイヤ30とホイール50との間に形成された内部空間Sに配置される。車体側装置は、TPMS送信機から送信された車輪情報を受信する受信部と、車輪14の回転に伴う遠心力によるケース62の変位量を推定する変位量推定部と、受信された車輪情報に含まれる加速度情報から得られる横力をケース62の変位量に基づいて補正する補正部とを有する。
(もっと読む)
車両負荷制御装置
【課題】 制御の起動トリガが故障した場合であっても、制御を継続可能な車両負荷制御装置を提供する。
【解決手段】 運転者による運転状態を検出する運転状態検出手段と、車両状態を制御する負荷と、負荷の制御量を演算する第1制御手段と、第1制御手段により演算された制御量に基づき負荷を駆動する第2制御手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第1起動信号を伝達する第1通信手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第2起動信号を伝達する第2通信手段と、第2制御手段に対し電流を供給する電源と、第2制御手段と電源とを接続する電源リレーと、第2制御手段に設けられ、電源リレーを通電側に保持する電源保持手段とを備え、第2制御手段は、第1起動信号と第2起動信号を監視する。
(もっと読む)
ブレーキ制御システム
【課題】鉄道車両用のブレーキシステムで、各車輪の滑走に対してブレーキ力をきめ細かく制御できるようにする。
【解決手段】車軸単位にブレーキ制御器2a〜2dを配置する。ブレーキ制御器2a〜2dは、各車軸単位に、応荷重信号、ブレーキ指令、電気ブレーキ信号を基に演算された必要空気ブレーキ力で、各車軸の空気ブレーキの制御を行う。各ブレーキ制御器2a〜2dの間で各車軸の軸速度を送受信し、各ブレーキ制御器2a〜2dに対応する車軸の軸速度と、各車軸の軸速度で送受信した他の車軸の軸速度とを用いて、対応する車軸の滑走を検知し、対応する車軸の滑走、再粘着の制御を行う。車軸単位にブレーキ制御器が配置されているので、各車輪に滑走が発生した場合、ブレーキ力をきめ細かく制御できる。また、台車単位の応荷重により、各々独立して空気ブレーキ力を作用できる。
(もっと読む)
車両制御装置
【課題】自動走行装置と自動制動装置とを備えた車両において、両装置の調和を図って車両の制御を適切に行うことを可能とする車両制御装置を提供する。
【解決手段】自動駐車装置と、車両後方に障害物を検出した場合に車両を自動制動する自動制動装置とを備える車両を制御する車両制御装置1である。この装置1では、車両後方に障害物を検出した場合(ステップS203)に、衝突までの余裕を示す衝突予測時間TTCを求め(ステップS205)、これが閾値以下である場合には、自動駐車装置の作動を中止する(ステップS206)。一方、衝突予測時間TTCが閾値よりも大きい場合は、自動駐車装置による走行出力を通常出力よりも低減させる(ステップS207)。このとき、障害物の種類に応じて、走行出力の低減のさせ方を変更する。
(もっと読む)
制駆動力制御装置、自動車及び制駆動力制御方法
【課題】目標前後加速度及び目標ヨーモーメントを発生させる制御時に、車両挙動をより安定化すること。
【解決手段】目標前後加速度αに基づいて目標合計制駆動力Fdを設定し、その目標合計制駆動力Fdを目標ヨーモーメントに基づいて左前後輪13FL、13RL及び右前後輪13FR、13RRに分配し、左前後輪13FL、13RLの摩擦円利用率qijの差及び右前後輪13FR、13RRの摩擦円利用率qijの差がそれぞれ小さくなるように前記左右輪に分配された目標合計制駆動力Fdを前輪及び後輪に分配した。そのため、摩擦円利用率qijが高い車輪の制駆動力が低減され、摩擦円利用率qijが低い車輪により多くの制駆動力が配分されるので、目標前後加速度α及び目標ヨーモーメントMを発生させる制御時に、特定の車輪13FL〜13RRだけタイヤグリップ力限界を超えることを防止でき、車両挙動がより安定化される。
(もっと読む)
21 - 40 / 908
[ Back to top ]