
Fターム[3D114AA15]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 目的、効果 (1,242) | 位置決め精度の向上 (136)
Fターム[3D114AA15]に分類される特許
21 - 40 / 136
組付け搬送装置
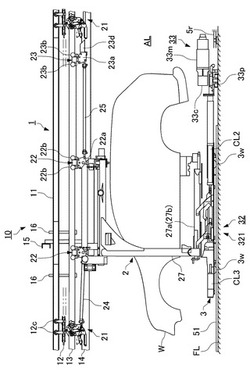
【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
加工システム及び加工方法

【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
自動車車体の組立装置及び車体組立方法
【課題】自動車車体の組立に必要なスペースを小さくすることが可能であるとともにサイクルタイムの短縮が可能な自動車車体の組立装置及び車体組立方法を提供する。
【解決手段】自動車車体の組立装置10は、サイドパネルW1を搬送する搬送装置12と、サイドパネルW1を溶接位置に位置決めする位置決め治具14と、サイドパネルW1を搬送装置12から受け取り、位置決め治具14にセットするロボット16とを備え、搬送装置12、位置決め治具14及びロボット16が1つの組立ステーション内に設置されている。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
ワーク取付け装置
【課題】ワークを車体に自動で取付けることができるワーク取付け装置を提供することを課題とする。
【解決手段】ワーク取付け装置10は、センサ180で検出した開口171の端部172とルーフガラス151の端部173との位置ずれ量、及びセンサ190で検出した開口171の端部181とルーフガラス151の端部182との位置ずれ量に基づき、制御手段200でルーフガラス151の位置及び姿勢を修正するために回転機構60及び移動機構110を制御する。
【効果】車体11の端部とルーフガラス151の端部との位置ずれが自動で解消された後、ルーフガラス151を車体11に取付ける。したがって、ルーフガラス151を車体11に自動で取付けることができるワーク取付け装置10を提供することができる。
(もっと読む)
フロントコンポーネント組立システムおよびフロントコンポーネント組立方法
【課題】ダッシュボードをホイールハウスハウジングおよびサイドフレームに高精度で位置決めできるフロントコンポーネントの組立システムを提供すること。
【解決手段】フロントコンポーネント組立システムは、ダッシュボード14、バルクヘッド13、ホイールハウスハウジング12、およびサイドフレーム11からなる自動車のフロントコンポーネント10を組み立てる。このフロントコンポーネント組立システムは、バルクヘッド13、ホイールハウスハウジング12、およびサイドフレーム11を互いに位置決めした状態で支持する搬送台車22と、ダッシュボード14を把持するダッシュボード把持ハンド53と、ダッシュボード把持ハンド53を移動するアーム54と、を備える。搬送台車22は、ダッシュボード把持ハンド53の第1位置決めピン534および突出部536が接続される位置決めピン嵌合部243および突出部嵌合部244を備える。
(もっと読む)
車体組立方法
【課題】 簡易な治具で所望な品質が得られるフロントコンポーネントの組立方法を提供する。
【解決手段】 ダッシュボードロア2にサイドフレーム3L,3Rとホイールハウスハウジング4L,4Rを夫々溶接した後に、サイドフレーム3L,3Rとホイールハウスハウジング4L,4Rを溶接し、サイドフレーム3L,3Rとホイールハウスハウジング4L,4Rを溶接した後に、ホイールハウスハウジング4L,4Rとバルクヘッド5を溶接する。また、サイドフレーム3L,3Rとホイールハウスハウジング4L,4Rを溶接する前に、サイドフレーム3L,3Rとバルクヘッド5を溶接する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
(もっと読む)
操縦ロボット
自動車のハンドル(1)に取り付けられる操縦ロボットは、環状の電動機(6)の回転子(5)に取り付けられた自身のハンドル(2)を有している。使用時に回転子の前面に取り付けられているものは、環状の取付板(9)であり、取付ボルト(11)を受け入れるためにわずかに内側に突き出している3つのタブ(10)を備えて構成されている。リング(14)からなる挟着部材(12)は、その周囲に等間隔で配置され、3つの穴を有する放射状の突起(15)を有している。この突起は、前記挟着部材(12)が自動車のハンドル(1)に一時的に取り付けることができるため、3つの挟着固定部材(16)のための取付け具を提供できる。前記固定子は、検査もしくは調査のときに操縦操作する電動機によって駆動される操縦トルクに反作用する一対のトルク反作用の突起(16)を有している。操縦ロボットの中央が開口している構造になっているため、制御装置を搭載したハンドルは通常通りに動作させることができる。 (もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
受渡し装置
【課題】 ナットを締付装置のソケットに確実に位相合せして挿入するナット受渡し装置を提供する。
【解決手段】 ナット16が供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。このためには、雌テーパ面17の垂直方向に対する角度は14°以下とする。角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を合せることができる。
(もっと読む)
表面処理領域に対して被処理物を搬入及び搬出する装置並びに方法
【課題】生産性の向上、表面処理領域に対する被処理物の搬入及び搬出動作のフレキシブル化並びにコストの低減化を図ることができる表面処理領域に対して被処理物を搬入及び搬出する装置を提供する。
【解決手段】ガイドレールに沿って移動可能な、被処理物Wを支持する複数のキャリア1、キャリア1の被牽引部材に係合する第1係合ドッグが取り付けられた通常速牽引駆動手段11、前記被牽引部材に係合する第2係合ドッグが取り付けられた、通常速牽引駆動手段11よりも牽引速度が速い高速牽引駆動手段12、表面処理領域Cの左右片側に設置した、前記ガイドレールの一部を分割した分割レールを搬送方向右側から見て反時計回りに回転させる回転駆動手段10、前記被牽引部材及び前記第1係合ドッグの係合を解除する第1係合解除手段、前記被牽引部材及び前記第2係合ドッグの係合を解除する第2係合解除手段を備えた。
(もっと読む)
車体へのフードの位置決め方法
【課題】外観部品であるフードが、外観性に影響が出ないように位置決めされる位置決め方法を提供することを課題とする。
【解決手段】車体13側の第1左前点31と第1右前点32の中点42を算出し、また、第1左後点33と第1右後点34の中点43を算出し、車体中心線44を定める。フード12側の第2左前点36と第2右前点37の中点45を算出し、また、第2左後点38と第2右後点39の中点46を算出し、フード中心線47を定める。次に、車体中心線44にフード中心線47が合致するように、フード12を矢印のように移動する。
【効果】中心線同士を合わせるため、フードが車体に対してオフセットして位置決めされる心配はない。結果、外観部品であるフードが、外観性に影響が出ないように位置決めされる。
(もっと読む)
車両のドアハンドリング治具および車両のドアハンドリング方法
【課題】本発明は、1つの治具で、ドアをドア搬送装置から車体の所定位置に搬送することを可能にする車両のドアハンドリング技術を提供することを課題とする。
【解決手段】車両のドアハンドリング治具20は、治具本体31に傾動自在に設けられドアの下端部36を受ける第1ワーク受け部40と、治具本体31からドアの下方へ挿入可能に設けられ、第1ワーク受け部40が待機位置へ移動されたときに第1ワーク受け部40に代わってドア13を受ける第2ワーク受け部43と、治具本体31に傾動自在に設けられ、ドアの車両長手方向の位置決めをなす長手位置決め部46と、ドアの側部37を車両の幅方向で挟むドアクランプ部51と、ドア13を吸着保持する吸着パッド52と、を備えている。
(もっと読む)
バンパビーム取付け装置及びバンパビーム取付け方法
【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
(もっと読む)
車体位置決め装置
【課題】車体フレームの取付位置を三次元に調整できること。
【解決手段】定盤11に設けられた一対の支柱12にクランプ13が設置され、これら一対のクランプに車体フレーム1を、車体支持軸14を介して支持し位置決めする車体位置決め装置10であって、クランプ13は、クランプケース15の内側に、内周面が外周面に対して偏心したリング形状の第1偏心ライナ16と第2偏心ライナ17が順次回転自在に配設され、第2偏心ライナ17の内周面に車体支持軸14に固定可能なクランプボール18が、球面移動自在に球面接触して配設されたものである。
(もっと読む)
車体組立装置
【課題】 車体組立装置において、組付部品の位置決め精度の向上と治具の交換作業に要する時間の短縮を両立する。
【解決手段】 使用する治具の変更時に摺動ユニットが乗り移るレールについては、比較的に精度の低いレールを採用する。それにより、治具の交換作業を、短時間で行うことが可能となる。一方、治具を用いて組付部品を位置決めする作業エリアのレールについては、比較的に精度の高いレールを採用する。それにより、組付部品の位置決め精度が確保される。
(もっと読む)
自動車ルーフ組付装置
【課題】従来のルーフ組付装置では、4車種以上の多車種に対応できない問題点や、生産過程によるバラツキのためルーフ位置を微調整しなければならない課題があった。
【解決手段】自動車ボディにルーフをセットするルーフセットマテハンロボット2と、接合部溝幅計測用ガイド10及び接合部溝幅計測用センサー11を備えた複数のルーフ位置決めロボット1と、ルーフ位置決めロボット制御装置4と、スポット溶接ロボット3とを有し、複数のルーフ位置決めロボット1の各々の接合部溝幅計測用センサー11は、複数の接合部溝Mの幅溝を、それぞれの接合部溝幅計測用ガイド10との間で計測し、幅溝の測定値をルーフ位置決めロボット制御装置4に送信し、順次この方法を繰り返すことでルーフを適正な位置にセットしてからスポット溶接ロボットによってルーフとボディを溶接する自動車ルーフの組付装置による。
(もっと読む)
21 - 40 / 136
[ Back to top ]