
Fターム[3D114BA09]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 対象物 (978) | 外部取付部品 (304) | ガラス (65)
Fターム[3D114BA09]に分類される特許
1 - 20 / 65
シール部を備えるワークの製造方法及びシール部を備えるワーク
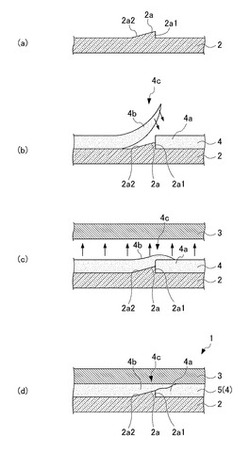
【課題】2部材間を密封するシール部の密封性を向上させるシール部を備えたワークの製造方法及びシール部を備えたワークを提供する。
【解決手段】樹脂ガラス2と取付枠3との間にシーラ4を塗布し、シーラ4の始端部4a上にシーラ4の終端部4bを乗り上げて会合させることで形成されたシール部5を備えるフロントウィンドパネル1の製造方法であって、シーラ4の会合部4cにおいて、樹脂ガラス2に樹脂ガラス2と取付枠3との間を狭める突起2aを設けることで、シーラ4の会合部4cにおける隙間の発生を防止する。
(もっと読む)
車両用ガラスの処理装置

【課題】よりシンプルな構成によって、車両用ガラスを迅速に処理することにある。
【解決手段】位置決め部材20の基準点を搬送部材10の基準位置に配置しつつ位置決め部材20を搬送部材10上に配置するとともに、検出部材70によって、車両用ガラスWの基準点と位置決め部材20の基準点の双方をそれらの上方から検出可能とし、検出部材70が、車両用ガラスWの基準点と位置決め部材20の基準点がずれていることを検出したとき、移動部材によって位置決め部材20を水平方向に移動させて同ずれを補正したのち、車両用ガラスWを持ち上げる構成である。
(もっと読む)
ガラス位置決め装置およびガラス位置決め方法
【課題】ガラスの寸法にバラつきがあったとしても、接着剤の塗布面の高さが一定になるようにガラスを位置決めすることを目的とする。
【解決手段】ガラスGに接着剤を塗布するために該ガラスを所定の位置に位置決めするガラス位置決め装置10であって、前記ガラスを挟んだ両側に配設され、前記ガラスを挟持する方向に沿って移動可能な位置決め部材31a、31bと、前記位置決め部材31a、31bの前記ガラス側にそれぞれ配設され、前記位置決め部材31a、31bが前記ガラスを挟持する方向の移動と共に移動され、前記ガラスを下方から固定する固定部材53a、53bと、を備えていることを特徴とする。
(もっと読む)
ガラス調整治具およびガラス調整方法
【課題】車両用サッシュレスドアのドアパネルに組み付けられる窓ガラスの組み付け精度を高めることができるガラス調整治具を提供することを課題とする。
【解決手段】車両用サッシュレスドア1のドアパネル2に組み付けられる窓ガラス3の組み付け位置を調整するためのガラス調整治具20であって、ドアパネル2に取り付けられるフレーム部材30と、ドアパネル2に組み付けられた窓ガラス3の縁部に当接することで、窓ガラス3を位置決めする規制部材50,60を有するガラス位置決め機構40と、を備え、ガラス位置決め機構40は、フレーム部材30に設けられており、フレーム部材30は、ドアパネル2のヒンジ部2a,2aおよびドアロック部2bに係合されることで、ドアパネル2に対して位置決めされる。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
組付け搬送装置
【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
ワーク取付け装置
【課題】ワークを車体に自動で取付けることができるワーク取付け装置を提供することを課題とする。
【解決手段】ワーク取付け装置10は、センサ180で検出した開口171の端部172とルーフガラス151の端部173との位置ずれ量、及びセンサ190で検出した開口171の端部181とルーフガラス151の端部182との位置ずれ量に基づき、制御手段200でルーフガラス151の位置及び姿勢を修正するために回転機構60及び移動機構110を制御する。
【効果】車体11の端部とルーフガラス151の端部との位置ずれが自動で解消された後、ルーフガラス151を車体11に取付ける。したがって、ルーフガラス151を車体11に自動で取付けることができるワーク取付け装置10を提供することができる。
(もっと読む)
脱脂液の塗布方法
【課題】塗布面における液だまりやかすれ等の塗布不良を防止する。
【解決手段】脱脂液を保有した脱脂液塗布部材2をワークWに押圧しながら移動させて油分や塵埃を拭き取る脱脂液Lの塗布方法であって、脱脂液Lを保持することが可能な脱脂液吸着体3の表層部3aに規定量の脱脂液Lを吸着保持させる吸着工程(a)〜(b)と、脱脂液塗布部材2を表層部3aに当接させて、規定量の脱脂液Lを脱脂液塗布部材2に浸透させて吸収する吸収工程(c)〜(e)と、を含み、吸収工程(c)〜(e)において吸収された脱脂液LをワークWに塗布する。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
自動車窓ガラスを切り抜くための方法および装置
【課題】装置の再位置決めがほとんどないか全くない、自動車窓ガラスを切り抜きを達成する新規な自動車窓ガラス切り抜きユニットを提供する。
【解決手段】ビークルガラスはめ込みパネルを切り取る際に、切断ワイヤと使用するための巻き取り機ユニット1が開示される。このユニットは、上記ガラスはめ込みパネルに取り付けられ得、そしてワイヤを巻き取るための第1および第2の巻き取り機スプール4、5を含む。案内要素(代表的には、プーリー)の周りの少なくとも1つのワイヤラップが、取り付け手段から離れて位置決めされる。このユニット1は、単独、または補助案内配列物と組み合わせてのいずれかで種々の技法で用いられ得る。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置を用いてワークを搬送する際にワークが破損することを防止しつつ、パワーアシスト装置によるワークの搬送効率を改善するために、搬送途中においてワークの姿勢を容易に安定させることができるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置5は、角度センサ7により検出するフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転角度θが、予め定めた下限角度θL以下である場合か、または、予め定めた上限角度θH以上である場合には、ブレーキ機構4aの解除状態を維持してフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転を規制しないように制御する。
(もっと読む)
ウインドシールド取り付け装置及び使用方法
車両のウインドシールドを交換する際に技術者1人で使用するためのウインドシールド取り付け装置である。装置は、車両の側窓に貼り付け可能な第1組立体と、車両に設置されようとしているウインドシールドに貼り付け可能な第2組立体を含んでいる。第2組立体は、第1組立体に連結し、第1組立体に対して軸回転するように適合されている。 (もっと読む)
ワークの形状認識システムおよびそれを具備する組立ライン、並びにワークの形状認識方法
【課題】搬送途中のワークの表面に現れる形状変化を精度良く認識し、組立ライン内に設けられる組付装置と、ワークとの間の位置ズレを防止することが可能な技術を提供することを課題とする。
【解決手段】車体3の搬送経路8に沿って設けられ、車体3の基準位置Zを検出するリミットスイッチ30と、同じく車体3の搬送経路8に沿って設けられ、車体3の基準位置Zからの移動量Lを検出するロータリエンコーダ40と、同じく車体3の搬送経路8に沿って設けられ、車体3の表面(主としてルーフ面3a、並びにその他の表面)との直線距離Hを検出するレーザ変位計50と、ロータリエンコーダ40とレーザ変位計50とにより検出された二つの検出値に基づいて、搬送方向と平行な方向における車体3の表面の形状変化を認識する認識装置60と、を具備する。
(もっと読む)
ガラス取り付けシステム
【課題】ガラスの取り付け作業にかかる時間を短縮でき、かつ、設備を小型化してコストを低減できるガラス取り付けシステムを提供すること。
【解決手段】ガラス取り付けシステム1は、フロントガラス11またはリヤガラス12とクォータガラス13とを搬送路21に沿って搬送する搬送装置22と、搬送路21に設けられた一対のガラス取り付けロボット27、28と、を備える。一対の取り付けロボット27、28は、フロントガラス11またはリヤガラス12を取り付ける大型ガラス取り付けロボット28と、クォータガラス13を取り付ける小型ガラス取り付けロボット27と、で構成される。搬送装置22は、フロントガラス11またはリヤガラス12とクォータガラス13とを1組として、この1組のガラスが同時に大型ガラス取り付けロボット28および小型ガラス取り付けロボット27に供給されるように、間欠的に駆動する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
ガラス搬送装置及びその制御方法、並びに車両の製造方法
【課題】ガラスを精度よく取付位置まで搬送することができるガラス搬送装置、ガラス搬送装置の制御方法、及び自動車の製造方法を提供すること。
【解決手段】本発明の一態様にかかるガラス搬送装置は、自動車100のガラスをその取付位置まで搬送するガラス搬送装置である。ガラスを保持する吸着治具60と、吸着治具60を移動させるための関節52を有するアーム機構50と、吸着治具60で保持したリアガラス2bを、ボディ101形状に応じた仮想ガイドGrに沿って移動させるよう、アーム機構50を制御する制御部80とを備えている。フロントガラス2aの取付位置の高さを記憶し、取付位置の高さに応じて仮想ガイド高さを算出し、仮想ガイド高さの仮想ガイドGrに沿って、リアガラス2aを移動させている
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置に対する作業負荷を軽減しつつ、ワーク組み付け作業の作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】パワーアシスト装置1の制御方法であって、ウィンドウ10の基準位置10a乃至10dが取付対象物たる本体11の嵌め込み基準位置11a乃至11dに合致したことを検知する位置決め完了検知工程と、位置決め完了検知工程が完了したときのウィンドウ10の基準位置10a乃至10dと本体11の嵌め込み基準位置11a乃至11dの合致位置を検知する基準位置検知工程と、合致位置に基づいて仮想回転軸を生成し、ウィンドウ10が仮想回転軸を中心としてパワーアシスト装置1により自律的に回転される自律回転工程から成る。
(もっと読む)
1 - 20 / 65
[ Back to top ]