
Fターム[3D244AA25]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 追突防止、車間距離保持 (389)
Fターム[3D244AA25]に分類される特許
41 - 60 / 389
運転支援情報提示装置
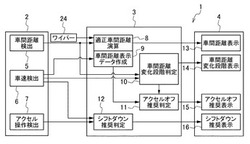
【課題】減速のみでなく、渋滞を回避して車間距離を維持するための加速を促す情報を提示でき、先行車に衝突することなくかつ低燃費走行のための操作の補助となる情報を提示でき、状況の確認/操作は運転者が行うこととして、システム依存が起こりにくいシステムを提供する。
【解決手段】システムは、車速検出手段と、適正車間距離演算手段と、先行車との車間距離から適正な車間距離に対する先行車との遠近の程度を示す指標を作成する車間距離表示データ作成手段と、作成された指標を表示する車間距離表示手段と、単位時間当たりの先行車との車間距離変化量と車速の変化率に相当する車間距離変化量とを比較して車間距離の変化の段階を判定する車間距離変化段階判定手段と、車間距離の変化段階を表示する車間距離変化段階表示手段とを備える。
(もっと読む)
ブレーキ制御装置

【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の走行制御装置
【課題】車両の前方の物体を検知し、車両の走行軌跡を推定し、該推定された走行軌跡に基づいて、該車両の前方に所定の検知エリアを設定する。
【解決手段】物体の検知結果および設定された検知エリアに基づいて先行車を抽出し、目標車間距離に基づいて、該先行車に追従走行するよう車両を制御する。ここで、検知エリア内で検知された先行車に対する距離が目標車間距離以下であるとき、追従走行の開始に応じて該検知エリアを拡大すると共に、該先行車に対する距離が該目標車間距離より大きいとき、該検知エリアの拡大を、該追従走行を開始してから所定時間が経過するまで禁止する。こうして、隣車線上の他の車両を誤って追従走行しようとする場合には、該他の車両に安定追従する前に、該他の車両を検知エリアから外すことができる。
(もっと読む)
追従制御装置
【課題】ACCによる追従制御時の車線変更時の車両の加速制御を的確に行う上で有利な追従制御装置を提供する。
【解決手段】ACCにより追従走行しているときの自車両201の車線変更時の加速制御のタイミングを、自車両201の走行方向が車線境界線103となす角度、車線境界線103と自車両201との距離、自車両走行車線101の前方車両202についての車両情報、隣接車線102の前方車両203、後方車両204についての車両情報をもとに決定する。また、自車両の車線変更時、自車両の走行速度と、隣接車線102の前方車両203、後方車両204の有無と、前方車両203、後方車両204が存在している場合の前方車両203、後方車両204の走行速度に応じた加速制御を行う。
(もっと読む)
車両用速度制御装置
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
車間距離制御装置
【課題】自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とする。
【解決手段】自車の停止保持制御中に先行車が発進したとき、先行車車速推定部12で先行車の車速と加速度とに基づいて発進から所定時間後の先行車の車速を推定し、ACC目標車速設定部13で先行車と自車との車間距離及び先行車の推定車速に基づいて追従走行の目標車速を設定する。そして、ACC再セット可否判定部14で目標車速を判定閾値と比較し、目標車速が判定閾値を超えているとき、ドライバのスイッチ操作入力によるACCの再セット許可と判定し、目標車速が判定閾値以下のときには、ACC再セット禁止と判定する。これにより、自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とすることができる。
(もっと読む)
走行制御装置
【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車群走行制御装置
【課題】車群内の一部の車両が車群を離脱する場合にも、車群を維持することができる車群走行制御装置を提供する。
【解決手段】
車群内順序決定部106により、各車両は、車群内の自車両の順序である車群内順序を決定し、走行計画とともに、車両IDおよび車群内順序を送信機から同報送信する。追従車両は、複数の先頭車両走行計画を取得した場合、先頭車両走行計画とともに送信されてくる車両IDと車群内順序に基づいて、それら複数の先頭車両走行計画を送信した各先頭車両の車群内順序を決定し、且つ、その決定した各先頭車両の車群内順序と自車両の車群内順序とに基づいて、自車両の走行計画を決定するために用いる先頭車両走行計画を選択する(先頭車両選択部108)。これにより、自車両が追従すべき先頭車両走行計画を誤らずに用いて追従車両走行計画を決定することができるので、車群内の一部の車両が車群を離脱する場合にも車群が維持される。
(もっと読む)
走行制御装置
【課題】車間距離変更時において衝突の不安感を乗員に与える可能性を低減する走行制御装置を提供する。
【解決手段】走行制御装置1は、無線制御ECU26の車車間通信によって、自車両と周辺車両との相対速度を取得し、前方車間距離センサ21aよって自車両と周辺車両との車間距離を検出する。車両制御ECU10は、上記相対速度と上記車間距離とに基づいて、TTCを演算し、自車両と周辺車両との車間距離を変更すべく自車両の加減速を行う場合に、車間距離の変更中におけるTTCの最小値が所定の衝突予測時間基準値を下回らないように、自車両の加減速のスケジュールを立案する。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
速度制御装置
【課題】速度差が小さい車両同士の無理な追い越し行動を抑制することができる速度制御装置を提供することを目的とする。
【解決手段】速度制御装置1は、自車100と自車100の直前を走行する直前車との速度差を測定する相対速度測定部13と、自車100の速度を調整する制御ECU10と、を備え、制御ECU10は、相対速度測定部13により測定された速度差が所定値よりも小さい場合には、自車100の速度を直前車の速度に合わせるように調整し、上記速度差が所定値以上であり、かつ、自車100による直前車の追い越しが完了するまでに自車の後方を走行する後方車が自車100に追い付くと予測される場合には、自車100の速度を直前車の速度に合わせるように調整する。
(もっと読む)
車両の運転支援装置
【課題】停止保持制御から追従走行制御への移行を違和感なく実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、停止中の前記先行車との車間距離Lが大値側に変化したとき車間距離Lの変化に伴って大値側に更新される第1の閾値Dth1と、先行車の車速Vfが高くなるほど大値側に変更される第2の閾値Dth2とを演算し、これらの何れか大きい値に基づいて前記判定閾値Dthを可変設定する。
(もっと読む)
車両の運転支援装置
【課題】停止時に意図しないタイミングで自車両が前進することを的確に防止して違和感のない運転支援を実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、操作入力からの経過時間tがドライバの操作入力直後を判定するキャンセル判定時間Tth1よりも長いことを判定し、且つ、先行車が設定車速Vth未満となる停止或いは略停止状態にあると判定したとき発進許可をキャンセルする。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
41 - 60 / 389
[ Back to top ]