
Fターム[3D246GB04]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 挙動制御 (1,026)
Fターム[3D246GB04]の下位に属するFターム
旋回時 (261)
レーンチェンジ時 (26)
オーバステア(スピン状態)抑制 (123)
アンダステア(ドリフトアウト状態)抑制 (122)
Fターム[3D246GB04]に分類される特許
161 - 180 / 494
電磁弁およびこのような電磁弁を有する運転手支援装置
本発明は、弁体(3)を備え、弁体(3)に、シール素子(14)によって閉鎖可能な弁座(12)、シール素子(14)を少なくとも部分的に収容する電磁弁(1)の流体スペース(15)に開口する少なくとも1つの流出通路(13)、およびシール素子(14)を少なくとも部分的に包囲する流体案内素子(16)が設けられており、シール素子(14)が流体案内素子(16)における流体スペース(15)に向いていない側に形成された磁石アンカスペース(17)に配置された磁石アンカ(5)と作用結合している電磁弁(1)に関する。本発明によれば、流体案内素子(16)が弁体(3)を少なくとも部分的に包囲し、流体スペース(15)と磁石アンカスペース(17)との間の流体接続を形成する接続通路(21)が弁体(3)の壁(30)を半径方向に貫通する半径方向切欠き(29)と流体接続している。本発明は、さらにこのような電磁弁(1)を有する運転手支援装置に関する。 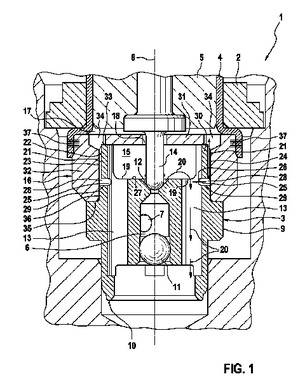 (もっと読む)
(もっと読む)
電動式ブレーキ装置
【課題】軸力センサにより安定したブレーキ力の検出を可能にするとともに、減速度検出値による制御と組み合わせてあらゆる速度域で高い精度にてブレーキ制御を行う。
【解決手段】ブレーキロータ23の回転面に直交させて電気アクチュエータ4によりブレーキパッド22を押し付けて制動を行う電動式ブレーキにおいて、前記ブレーキパッド22の押付け力を検出する軸力センサ10から得られた検出値と、車輪速度センサ30から演算されて得られた減速度とから、運転者の操作目標とする減速度制御を行うことにより、温度変化の影響を受けにくく指向性を保持し易い直動変換部13、14に配設した軸力センサ10と、制動中のブレーキパッド22の摩擦係数の変化の影響を受けにくい減速度検出とを組み合わせて、操作者のブレーキ要求に基づく電気的ブレーキ制御をあらゆる速度域にて高い精度にて行うことが可能となった。
(もっと読む)
ピストンポンプ

本発明は、スリップ制御付き車両ブレーキシステムのピストンポンプに設けたシールリング(11)の支持リング(12)に縦方向溝(14)を形成し、これにより、引きずり漏出によるシールリング(11)と支持リング(12)との間の圧力形成を防止する。 (もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】路面摩擦係数に応じた適切な減圧量で減圧制御を行い、ブレーキフィーリングを向上させる。
【解決手段】車両用ブレーキ液圧制御装置は、常開型電磁弁および常閉型電磁弁を制御することで、車輪ブレーキ内の液圧を増減する制御を行う制御手段(制御部20)を備える。制御手段は、車輪速度が減少中で減圧制御することを決定した場合において、基本減圧制御(基本減圧制御部251)と漸減圧制御(漸減圧制御部252)とを続けて行う減圧サイクルで減圧を行い、基本減圧制御においては、基本減圧量で減圧制御を行い、漸減圧制御においては、所定時間、液圧を保持する一時保持制御(一時保持制御部252A)と、当該一時保持制御の後、車輪速度が減少傾向にある場合には、基本減圧量より小さい量の減圧を実行する微小減圧制御(微小減圧制御部252B)とを行う。
(もっと読む)
特に液圧式ピストンポンプのためのシールリング
シールリップ(16)が輪郭部(18)によりシール面(28)に接触し、シール面に対して移動可能である、流体によって満たされた圧力室(30)をシールするための、特に液圧式ピストンポンプ用のシールリング(10)において、シールリップ(16)の輪郭部(18)が、シール面(28)に対するシールリップ(16)の速度に適合されており、これにより、圧力室(30)から流体の所定の漏出量が得られるように調節されている。 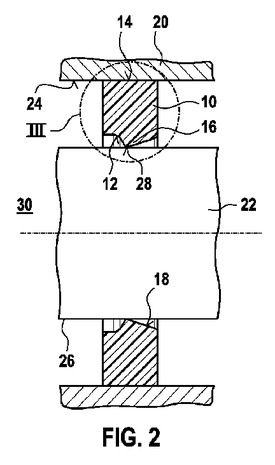 (もっと読む)
(もっと読む)
ブレーキ液圧制御装置
【課題】 ブレーキ液圧制御装置において、ポンプ作動時のモータから発生する振動に起因する音振を抑制すること。
【解決手段】 ハウジングに互いに回転軸が同じ方向になるように組み付けられ、独立して駆動可能な2組の回転駆動式ポンプモータと、前記ハウジング内に設けられ、前記各ポンプモータにより駆動される2組のポンプと、前記ハウジングに組みつけられ、ブレーキ液を加圧して車両に設けられた複数のホイルシリンダを加圧するために前記各ポンプモータを回転駆動可能なコントロールユニットと、を備え、前記コントロールユニットは、運転者のブレーキ操作に応じて演算される指令値に基づき前記各ポンプモータを回転駆動し、前記ホイルシリンダに対する要求液圧が設定された液圧より高い場合には前記各モータを互いに逆回転させ、低い場合には前記回転駆動式ポンプモータの1つを回転させて前記ホイルシリンダを加圧することした。
(もっと読む)
自動車およびその制御方法
【課題】二次電池の入力制限が厳しい側に変化したときでも電動機による回生制動力と機械式ブレーキによる制動力とのすり替えをスムーズに行なう。
【解決手段】バッテリの入力制限Winが所定時間程度経過したときに連続充放電電流積算値が閾値に至って入力制限Winが厳しい方向に変化するのを予測したときには、そのときから所定時間が経過するまでは比較的小さなレート値Trt1を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替え(S150)、所定時間が経過した以降は比較的大きなレート値Trt2を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替える(S160)。これにより、モータMG2の制動トルクをスムーズに油圧ブレーキによる制動力にすり替えることができ、ドライバに与えるブレーキフィーリングの悪化を抑制することができる。
(もっと読む)
車両の旋回挙動制御装置
【課題】旋回走行時における制動力制御を正確に行い、走行安定性能を向上させる。
【解決手段】車両の左右駆動輪の制動力を独立して制御可能に構成して、実ヨーレイトと車速及び操舵角から演算した目標ヨーレイトとの差に応じて旋回内輪の制動圧Puまたは旋回外輪の制動圧Poを設定し、車両がアンダーステア状態である場合には、旋回内輪の制動圧Puからデフにおけるフリクションによる拘束トルクTdを減算して旋回内輪の制動圧Pu’を求め(S60)、車両がオーバーステア状態である場合には、旋回外輪の制動圧Poにデフにおける拘束トルクTdを加算して旋回外輪の制動圧Po’を求める(S100)。そして、求めた旋回内輪の制動圧Pu’または旋回外輪の制動圧Po’で左右駆動輪を制動する(S110)。
(もっと読む)
油圧式の自動車ブレーキシステムの高圧開閉弁の制御のための方法
【課題】騒音の発生並びに弁の熱負荷を低減することが可能な、自動車の油圧式ブレーキシステムに配置されている開閉弁(3)の制御のための方法および装置を提供する。
【解決手段】開閉弁(3)が、電流強度の異なる複数の制御段階(tV、tH、tR)を有する電気信号の印加によって開かれる、自動車の油圧式ブレーキシステムの中に配置されている、開閉弁(3)の制御のための方法において、前段階或いは保持段階のための制御段階の時間長さが走行状況に対して可変的に適応される。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】サスペンションの形式等に関わらず、確実に走行車線からの逸脱を回避する方向にヨーモーメントが発生するように、各輪の制動力を適切に分配して制動制御する。
【解決手段】白線、障害物に対する第1、第2の逸脱量を算出し、ヨーモーメントを発生させて白線、障害物に対する逸脱を防止するための第1、第2の制動力制御量、減速度を発生させて白線、障害物に対する逸脱を防止するための第3、第4の制動力制御量を設定する。第1、第2の制動力制御量によりヨーモーメントを発生させるための制動力制御を実行する際に、前軸のキングピン配置に起因する路外逸脱方向へのステアリングトルクの発生が予め設定した値を超えないようにヨーモーメントを発生させるための制動力制御量の前軸側の分担率を制限すると共に、前後の制動力配分が接地荷重配分となるように制動力配分を補正して、各輪の路外逸脱防止制御用制動力を算出する。
(もっと読む)
ブレーキ制御システム
【課題】ブレーキ操作量検出装置を使用する複数の制御装置を有するブレーキ制御システムにおいて、ブレーキ操作量検出装置を1つにするブレーキ制御システムを提供する。
【解決手段】ブレーキ操作量に基づいて、マスタシリンダ圧を制御するマスタシリンダ圧制御装置と、各車輪のホイールシリンダ圧を制御するホイールシリンダ圧制御装置と、マスタシリンダ圧を算出するための信号を検出するマスタシリンダ圧検出装置と、を有し、マスタシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてマスタシリンダ圧を制御し、ホイールシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてホイールシリンダ圧を制御するブレーキ制御システム。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
推定加速度演算装置
【課題】路面状態や車両の旋回状態による誤差を抑制し、精度良く推定Gを演算することができる推定G演算装置を提供する。
【解決手段】悪路レベルや車両の旋回状態に応じて転がり抵抗係数fを補正し、運動方程式に用いられる転がり抵抗係数frとして補正後転がり抵抗係数fを用いて推定G演算を行う。これにより、悪路レベルや車両の旋回状態に応じて正確な補正後転がり抵抗係数frに基づいて推定G演算を行うことが可能となり、車両の旋回状態を加味して精度良く推定Gを演算することができる。
(もっと読む)
車両用ブレーキ制御装置
【課題】ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御が行えるようにする。
【解決手段】差圧制御弁によって規定差圧を発生させつつ、各規定差圧に対応したポンプ漏れモータ回転数を求め、規定差圧に対するポンプ漏れモータ回転数特性を記憶する。この規定差圧に対するポンプ漏れモータ回転数特性を利用して、運動挙動制御によってモータを駆動するときには、ポンプ漏れを加味したモータ目標回転数にてモータを駆動する。これにより、ポンプ漏れが発生していても、ポンプ漏れが発生していない場合と同じ応答性で目標差圧を発生させることが可能となる。したがって、差圧制御弁によって目標差圧を発生させることで、車両の運動挙動制御を行う車両用ブレーキ制御装置において、ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御を行うことが可能となる。
(もっと読む)
車両挙動制御装置
【課題】より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることを可能とする。
【解決手段】車両が横滑りに至った不安定領域R2となるより前の状態である横滑り前状態を検出し、横滑り前状態が検出されたときに旋回外側後輪に対して制動力を発生させる。この旋回外側後輪に発生させた制動力によって、旋回外輪に対して掛かる荷重が増加させられ、車両の横力が増加させられる。このため、車両の横滑りを発生させ難くすることが可能となり、いわゆるスロースピンのような緩やかな車両挙動低下を事前に抑制することができる。よって、より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることが可能となる。
(もっと読む)
電流検出装置
【課題】負荷回路毎に設けた複数の電流検出回路間における相対誤差を抑制できる電流検出装置を提供する。
【解決手段】負荷101aの電流を検出するためのシャント抵抗RSaに定電流回路105を直列に接続させて、シャント抵抗RSaに定電流値を流したときのオペアンプOPaの出力を求めると共に、負荷101bの電流を検出するためのシャント抵抗RSbに定電流回路105を直列に接続させて、シャント抵抗RSbに定電流値を流したとき、即ち、オペアンプOPaと共通の電位差を入力させたときのオペアンプOPbの出力を求める。そして、共通の電位差を入力させたときのオペアンプOPa及びオペアンプOPbの出力から、オペアンプOPaとオペアンプOPaとの相対誤差を補正するための補正値を設定する。
(もっと読む)
電子制御ユニットおよび車両用ブレーキ液圧制御装置
【課題】ハウジング内に収容されたセンサに伝わる振動を低減することができ、センサの検出精度を高めることができる電子制御ユニットを提供することを課題とする。
【解決手段】電子制御ユニット10であって、センサが取り付けられたセンサ基板と、電気部品の作動を制御する制御基板と、センサ基板および制御基板が収容されるハウジング40と、を備え、ハウジング40の内部空間には、電気部品が収容される第一収容室41と、センサ基板および制御基板が階層状態で収容される第二収容室と、第一収容室と第二収容室とを仕切る仕切部44と、が形成されており、センサ基板および制御基板は仕切部44に支持され、仕切部44にはリブ44gが突設されている。
(もっと読む)
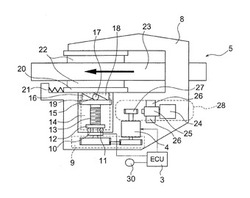
流体ユニットを振動緩衝して支承するための装置および対応した流体ユニット
本発明は、車両ユニット、特に車両ブレーキシステムの流体ユニットを対応した収容開口(34.1,34.2,34.3)で振動緩衝して支承するための装置(20)および少なくとも1つのこのような装置(20)を有する弾性的な車両ユニット(10)に関する。装置(20)は、植込みボルト(22)と、植込みボルト(22)によって貫通係合され、対応した収容開口(34.1,34.2,34.3)に設けることのできる外方に開いた収容溝(26.4)を備えるスリーブ状の弾性的な緩衝要素(26)と、植込みボルト(22)によって案内された締付けスリーブ(24.3)と、雌ねじ山(24.2)を有するねじ要素(24.1)とを備え、植込みボルト(22)が、装置(20)をユニット(10)に結合することができる結合ピン(22.9)と、雄ねじ山(22.3)を有するねじ山付シャフト(22.2)とを備え、前記弾性的な緩衝要素(26)に対して締付けスリーブ(24.3)を前記植込みボルト(22)に沿って軸線方向に移動するためにねじ山付シャフトにねじ要素(22.1)がねじ込み可能であり、これにより、締付けスリーブ(24.3)が、軸線方向に弾性的な緩衝要素(26)に対して植込みボルト(22)に沿って軸線方向に移動され、弾性的な緩衝要素(26)が、締め付けられた状態で半径方向に拡大されており、かつ軸線方向に短縮されている。締付けスリーブ(24.3)とねじ要素(24.1)とは当接ショルダ(24.4)を有する一体的な締付け要素(24)として構成されており、締付け要素(24)によるねじ込み運動によって生成される軸線方向力が当接ショルダ(24.4)を介して弾性的な緩衝要素(26)に作用する。  (もっと読む)
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
161 - 180 / 494
[ Back to top ]