
Fターム[3D246GB04]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 挙動制御 (1,026)
Fターム[3D246GB04]の下位に属するFターム
旋回時 (261)
レーンチェンジ時 (26)
オーバステア(スピン状態)抑制 (123)
アンダステア(ドリフトアウト状態)抑制 (122)
Fターム[3D246GB04]に分類される特許
101 - 120 / 494
制動装置及び車両
【課題】制動時の車体の偏向を効果的に抑制することができる制動装置及び車両を提供することを目的とする。
【解決手段】車体に回転自在に配置された第1タイヤと第2タイヤに制動力を付与する制動装置であって、ブレーキペダルと、液圧を供給する第1液圧室を備えた第1シリンダ、液圧を供給する第2液圧室を備えた第2シリンダ、及び、前記ブレーキペダルに入力された外力を第1シリンダと第2シリンダとに直接伝達するリンク機構を備えるマスタシリンダと、第1液圧室から供給された液圧に基づいて第1タイヤに制動力を作用させる第1油圧制動部と、第2液圧室から供給された液圧に基づいて第2タイヤに制動力を作用させる第2油圧制動部と、を有し、マスタシリンダは、リンク機構から第1シリンダ及び第2シリンダに外力が伝達されると、第1液圧室と第2液圧室とで異なる液圧を発生させることで、上記課題を解決する。
(もっと読む)
速度制御装置

【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両用の電子制御システム及び車両システムで運転者に依存しない少なくとも1つの介入を算出する方法
【課題】車両が物体との衝突を回避する電子制御システム及び方法を提供する。
【解決手段】リスクコンピュータによって、車両システムへの運転者に依存しない少なくとも1つの、しかしながら特に多数の介入を算出する方法。プリセットされている車両データ,環境データ,実際の車両及び運転者のデータ,車両内外の人のデータ等が、このリスクコンピュータの入力部に入力される。このリスクコンピュータは、これらのデータに基づいて車両とこの車両の内側及び外側にいる人との危険状況を評価しこの評価及び場合によってはその他の基準値又は重み付けに応じて、アクチュエータを制御する制御信号を出力する。人及び車両に対する最大の保護作用が、優先回路にしたがって得られるように、これらのアクチュエータは、車両の運転者の行動及び/又は乗客の保護及び/又はその他の道路使用者(歩行者,自転車に乗る人等)に対する保護手段を変更又は起動する。
(もっと読む)
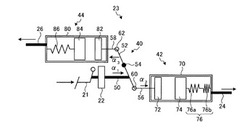
電動制動装置
【課題】正常作動時のペダルシミュレート機能を有しつつブレーキ液圧を運転者の操作入力にかかわらず自動制御でき、かつ回生協調制御し得ると共に、構造を簡素化する。
【解決手段】マスターシリンダ5に、ストロークに応じて反力付与されたブレーキペダル1の空走後に変位し得る第1ピストン6と第1ピストンに向けてばね付勢される第2ピストンを設け、ブレーキペダルの変位検出値に応じてスレーブシリンダ15を電動モータ17で駆動してブレーキ液圧を発生し、マスターシリンダの両ピストン間の第1液室13を介し、また第2ピストンにより第2液室の液圧を増大して各ホイールシリンダにブレーキ液圧を供給する。適切な反力を設定でき、システム異常時には、ブレーキペダルにより両ピストンを機械的に変位させて、ブレーキ液圧を発生させることができ、従来のシミュレータ遮断弁を用いた構成のように電気的な制御を必要とせず、構成を簡素化し得る。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
車両の駆動力制御装置
【課題】車両の加速時に駆動輪が回転振動するとき又はその虞れがあるときにはトランスミッションの変速比のアップシフト変更を促進することにより、車両の加速時に於ける駆動輪の回転振動を効果的に抑制する。
【解決手段】車両の加速時に(ステップ110)、駆動輪の回転振動を検出したとき(ステップ130)、若しく走行路がまたぎ路であると判定したときには(ステップ160)、駆動輪の回転振動が終息し(ステップ210)若しくはまたぎ路走行が終了するまで(ステップ220)、トランスミッション16の変速段を演算するための目標駆動力Fp_t_futureを漸減し(ステップ190、200)、トランスミッションの変速段のアップシフトを促進する。
(もっと読む)
運転操作支援装置、運転操作支援方法
【課題】停車状態を維持するための制動力を運転者のアクセル操作に応じて解除して車両を発進させる際に、車速コントロールの操作性を向上させる。
【解決手段】アクセル操作量Saが第一の閾値th1以下のときには、最終制動力指令値FBを保持制動力指令値FBPKBとし、アクセル操作量Saが第一の閾値th1を超えるときには、アクセル操作量Saが大きいほど、保持制動力指令値FBPKB未満の範囲で最終制動力指令値FBを小さくする(ステップS109)。一方、アクセル操作量Saが第二の閾値th2以下のときには、駆動力指令値FAはクリープトルクTcに設定し、アクセル操作量Saが第二の閾値th2を超えると、アクセル操作量Saが大きいほど、クリープトルクTcよりも大きな範囲で駆動力指令値FAを大きくする(S112)。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両に設けられた加速度センサからの検出信号に基づき車体加速度Gを演算する。そして、ブレーキ用ECUは、車両の停車前に演算した車体加速度Gの絶対値が、車両で発生するクリープトルクに相当する加速度として設定されたクリープ加速度Acの絶対値よりも大きい場合に、エンジンの停止を許可する停止制御を行う(第2のタイミングt12)。
(もっと読む)
車両挙動制御装置及びその方法
【課題】車両挙動制御により車両挙動がオーバーシュートしてしまうのを抑制する。
【解決手段】車両挙動制御装置は、操舵角比例目標ヨーレイト算出部12が算出した運転者の操舵操作に車両挙動を追従させるための自車両の目標ヨーレイトと推定ヨーレイト算出部13が算出した自車両の推定ヨーレイトとの偏差の変化を基に、自車両にヨーモーメントを付与するための目標ヨーモーメントを算出する目標ヨーモーメント算出部16と、目標ヨーモーメント算出部16が算出した目標ヨーモーメントを基に、ヨーモーメントを付与するVDCコントローラ3及びブレーキ液圧算出部17と、を備え、偏差の変化の推移に応じて、第1目標ヨーモーメント、第1目標ヨーモーメントよりも小さい付与抑制目標ヨーモーメント、及び第1目標ヨーモーメントとはヨーモーメントの方向が反対方向となる第2目標ヨーモーメントの順序で目標ヨーモーメントを算出する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
ブレーキ制御装置およびこれを備えたブレーキシステム
【課題】通常の車両走行中のブレーキ作動時でのブレーキ異音の発生を効果的に抑制して、車両の静粛性や乗員の快適性を効果的に向上する。
【解決手段】ブレーキ液圧検出部43,44,45,46で検出したブレーキ液圧のデータ
、ブレーキパッド温度検出部47,48,49,50で検出したブレーキパッド温度のデー
タ、異音発生検出部52,53,54,55のブレーキ異音の発生の情報に基づいて異音の
発生エリアが記憶部58に記録される。異音発生条件成立判定部59が、通常走行中のブレーキ作動時のブレーキ力のデータおよびブレーキパッド温度のデータが記憶部58の異音の発生エリアになったと判定したとき、ブレーキ液圧変化信号出力部61がブレーキ液圧変化信号を出力する。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵操作部材SWの操舵量Saa、及び、車両の旋回状態の程度を表す旋回量Tcaに基づいて、制動手段を介して車輪の制動トルクを増加して車両安定性を向上する制動制御を実行する。制御手段CTLは、旋回量Tcaが規範量Trfを超過する場合に制動トルクを増加する。制御手段CTLは、操舵量Saaが連続して増減する過渡操舵状態を操舵量Saaに基づいて判別し、過渡操舵状態を判別する場合には規範量Trfを小さい値に変更する。制御手段CTLは、操舵速度dSaに基づいて、操舵速度dSaが大きいほど規範量Trfを小さく設定する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
101 - 120 / 494
[ Back to top ]