
Fターム[3D246GB04]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 挙動制御 (1,026)
Fターム[3D246GB04]の下位に属するFターム
旋回時 (261)
レーンチェンジ時 (26)
オーバステア(スピン状態)抑制 (123)
アンダステア(ドリフトアウト状態)抑制 (122)
Fターム[3D246GB04]に分類される特許
21 - 40 / 494
ブレーキ倍力装置
【課題】 ブレーキ倍力装置とホイルシリンダとの間にブレーキ液圧制御ユニットが介在したとしても、良好なペダルフィーリングを得ることが可能なブレーキ倍力装置を提供すること。
【解決手段】 液圧制御ユニットの作動時と非作動時とで倍力装置の制御を異ならせ、液圧制御ユニットが作動したとしても入力部材の変位が小さくなるように制御することとした。
(もっと読む)
制駆動力制御装置および制駆動力制御方法

【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
ブレーキ制御装置
【課題】長時間モータ駆動を行わなくても、モータ空回り判定を行うことが可能なブレーキ制御装置を提供する。
【解決手段】モータ空回り判定時に、モータ60を2回駆動し、1回目には第1時間モータ駆動を行い、2回目には第1時間よりも長い第2時間モータ駆動を行う。そして、1回目と2回目それぞれで、モータ60停止後のモータ60による発電電圧(MT)が所定の閾電圧に低下するまでの第1、第2電圧低下時間MT1、MT2の差が閾時間以上であるか否かを判定することで、モータ空回り判定を行う。このように、1回目と2回目のモータ駆動時間を変えることにより、極低温時のように、ブレーキ液やモータ60の回転軸に塗布されているグリスなどの粘度が高くなったとしても、第1、第2電圧低下時間MT1、MT2の差に基づいて、モータ空回り判定が行える。したがって、長時間モータ駆動を行わなくてもモータ空回り判定を行うことができる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】運転者が打音の原因を把握できない状況下において常閉型電磁弁から発生する打音を抑えることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、常閉型電磁弁への駆動電流を目標電流値C1まで瞬時に第1勾配で上昇させる応答性優先制御と、常閉型電磁弁への駆動電流を、第1勾配よりも緩やかな第2勾配を用いて目標電流値C1まで上昇させる静粛性優先制御と、常閉型電磁弁への駆動電流を、第1勾配よりも緩やかで、かつ、第2勾配よりも急な第3勾配を用いて目標電流値C1まで上昇させる中間制御と、を液圧制御モードに応じて切り替えて、常閉型電磁弁を制御する。
(もっと読む)
液圧ブレーキシステム
【課題】複数のブレーキシリンダが接続された共通通路を備えた液圧ブレーキシステムにおいて、複数のブレーキシリンダの液圧が個別に制御されるとともに、共通通路の液圧が制御される場合に、共通通路の液圧制御において制御ハンチングを抑制する。
【解決手段】第1フィルタ処理部250、第2フィルタ処理部252は、共通通路液圧センサ226の検出値Prawの平均値を求め、フィルタ値として出力する。第1フィルタ処理部250において用いられる検出値の個数Nは、第2フィルタ処理部252において用いられる個数NABSより少なく、第2フィルタ値PvalABSは第1フィルタ値PvalNより平滑化のレベルが高い。並行共通通路液圧制御部260においては、第2フィルタ値PvalABSに基づいて共通通路の液圧制御が行われる。その結果、第1フィルタ値PvalNに基づく場合に比較して、制御ハンチングを抑制することができる。
(もっと読む)
車両の挙動シミュレーション装置及び方法
【課題】所定の熟練度を有するドライバーが操作する車両の挙動を精度よく再現可能な車両の挙動シミュレーション装置及び方法を提供する。
【解決手段】本発明に係る車両の挙動シミュレーション装置(1)は、予め規定された走行パターンで走行する車両の挙動を再現するものであり、実速度を取得する認識部(2)と、目標速度を予測する予測部(5)と、実速度と目標速度との偏差に基づいて操作目標速度及び該操作目標加速度を算出する判断部(3)と、車両の駆動系に対する操作量を算出する車両特性部(6)と、前記算出された操作量で駆動系の操作を行う操作部(4)とを備える。特に、前記認識部(2)、判断部(3)及び操作部(4)における制御には、車両の運転者の熟練度に応じて可変に指定される所定の誤差及び遅れが付加されることを特徴とする。
(もっと読む)
電動ブレーキ装置
【課題】ピストン及びその周辺部品の組付作業を容易にして組付性を向上させること。
【解決手段】前方に配置される第1スレーブピストン88bと、第1スレーブピストン88bの後方に配置される第2スレーブピストン88aと、前記第1スレーブピストン88bと前記第2スレーブピストン88aとの離間位置を規制する規制手段100と、前記第1スレーブピストン88bと前記第2スレーブピストン88aとを離間する方向に付勢する第2スプリング96aとを備え、連結ピン79を介して、第1スレーブピストン88b、規制手段100、第2スプリング96a、及び、第2スレーブピストン88aを一体的に組み付けて構成した。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
ブレーキアクチュエータ
【課題】ブレーキシステムのコストダウンを図ることができるブレーキアクチュエータを提供する。
【解決手段】第2ブレーキ系110aおよび第1ブレーキ系110bに、タンデム式のマスタシリンダ34における第1圧力室56bおよび第2液圧室56aにそれぞれ接続される導入ポート26bおよび導入ポート26a、モータシリンダ装置16を接続する導入ポート26c、26d、マスタシリンダ34とのブレーキ液の流通を遮断する第1遮断弁60bおよび第2遮断弁60a、第1遮断弁60bの下流圧を検出する圧力センサPp、第2遮断弁60aの上流圧を検出する圧力センサPm、ストロークシミュレータ64、第3遮断弁62、を一体に構成した。
(もっと読む)
牽引車両の制御装置
【課題】4輪駆動車の前後軸間の駆動力配分制御と牽引走行における揺動抑止制御とを適切に協調して行い、最適な揺動抑止効果を安定して得る。
【解決手段】牽引車両100の走行状態に基づいて該牽引車両100に発生する揺動状態を検出し、検出した牽引車両100の揺動状態に基づいて該揺動を抑制する制御の実行を判定し、揺動を抑制する制御を実行すると判定した場合にブレーキ制御部32に信号を出力して制動力により牽引車両にヨーモーメントを発生させて揺動を抑制する等の制御を実行させると共に、この揺動を抑制する制御を実行する場合に前後駆動力配分制御部31によるトランスファクラッチトルクTlsdを前後軸間の駆動力配分を前軸側に多く移動補正して出力させる。
(もっと読む)
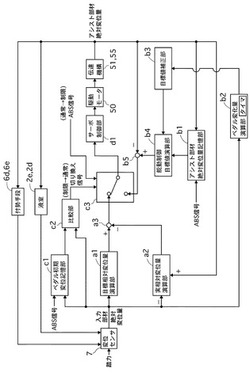
車両用ブレーキ装置
【課題】 開閉弁によって2系統の圧力供給系を切り替える車両用ブレーキ装置において、液圧供給開始時に開閉弁の作動を保証する。
【解決手段】 ブレーキペダル11と、マスターシリンダ15と、マスターシリンダに配管42a・42bを介して接続されたホイールシリンダ2b・3bと、配管上に設けられた電磁弁である開閉弁24a・24bと、ペダル位置センサ11aと、配管の開閉弁とホイールシリンダとの間の部分に接続され、電動サーボモータ12を備えたモータ駆動シリンダ13と、開閉弁及びモータ駆動シリンダに電力を供給する電源7と、制御ユニット6とを有する車両ブレーキ装置1であって、制御ユニットは、ペダル操作量が開始値に達したときに、開閉弁を閉弁作動し、開始値に達したときから開閉弁が閉じられるまでに要する閉弁作動期間は、電動モータの消費電力量を抑制することを特徴とする。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置における電磁弁の発熱低減効果をより一層大きくする。
【解決手段】マスターシリンダとホイールシリンダとの油路上に電磁弁を設け、電磁弁とホイールシリンダとの間にブレーキ液圧を発生させるモータ駆動シリンダを設け、制動時には電磁弁を閉弁状態にするように通電制御する。マスターシリンダによる液圧が電磁弁の開弁方向に作用し、液圧発生手段による液圧が電磁弁の閉弁方向に作用するように配管する。操作量及び液圧発生手段の作動量に基づいて電磁弁の閉弁状態が維持されるように電磁弁への通電の大きさを制御する。マスターシリンダ側と液圧発生手段側との液圧の大きさの違いに応じて、電磁弁の閉弁方向の駆動力を推定することができ、それに応じて閉弁状態を維持するための必要最小限の通電を行うことができるため、電磁弁の発熱をより一層低減し得る。
(もっと読む)
車両の運転支援制御装置
【課題】降坂時定速走行制御による定速走行を、たとえエンジンブレーキでは制動力が不足するような領域でも精度良く安定して行うことができ、ドライバに対して的確な路面情報を伝えつつ、変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を実行する際は、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定車速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、制動力が不足すると判定した場合は、Nレンジ位置にさせると共に、車輪の接地荷重配分に応じて不足する制動力を設定する。また、制動力が不足すると判定した場合には、トランスファクラッチトルクTlsdを略0に近い値に設定させ、制動力が十分であると判定した場合には車輪の接地荷重配分に応じて設定させる。
(もっと読む)
車両用ブレーキ装置
【課題】 ブレーキ・バイ・ワイヤによる車両用ブレーキ装置において、モータ駆動シリンダの始動時に、ホイールシリンダに加わる液圧のオーバーシュートを抑制する。
【解決手段】 ブレーキペダル11に機械的に連結されたマスターシリンダ15と、マスターシリンダに配管42a・42bを介して接続されたホイールシリンダ2b・3bと、配管上に設けられた開閉弁24a・24bと、ブレーキペダルのペダル操作量を検出するペダル位置センサ11aと、配管の開閉弁とホイールシリンダとの間の部分に接続され、配管に液圧を供給するモータ駆動シリンダ13と、開閉弁及びモータ駆動シリンダを制御する制御手段6とを有する車両ブレーキ装置1であって、制御手段は、モータ駆動シリンダの駆動を開始する際には、開閉弁を開いた状態に維持し、モータ駆動シリンダの駆動開始後に開閉弁を閉じることを特徴とする。
(もっと読む)
液圧ブレーキ装置
【課題】 エンジン停止時にも十分な制動力を得ることができる液圧ブレーキ装置を提供すること。
【解決手段】 回生制動装置を備えた車両に用いられる液圧ブレーキ装置において、ドライバのブレーキ操作に応じてマスタシリンダから流出したブレーキ液を第1のポンプを用いて昇圧する昇圧部と、第2のポンプを備え、昇圧されたブレーキ液を用いて車輪に設けられたホイルシリンダ毎に液圧制御可能な液圧ブレーキ制御部と、液圧ブレーキ制御部による液圧ブレーキ中に回生制動装置が作動したときに、回生制動装置による制動トルク相当の液圧を第1のポンプを用いて前記ホイルシリンダから回収する液圧回収部と、を設けた。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
車両制御装置
【課題】より多い頻度でホイールベースの値を取得して、より的確な車両制御が行えるようにする。
【解決手段】車両安定化制御において車両諸元としてホイールベースLを使用する場合に、ホイールベースLが変更されている場合にも対応できるようにホイールベースLの値を推定演算する。そして、少なくとも車両旋回中の車速もしくは車輪速度と、操舵角StrあるいはヨーレートYrのいずれかに基づいてホイールベースLの推定演算を行うようにすることで、より多い頻度でホイールベースLの値を取得する。また、このように推定演算したホイールベースLに基づいて、車両安定化制御を行う。これにより、ホイールベースLが変更されたとしても、的確なホイールベースLに基づいて的確な車両安定化制御を行うことが可能となる。
(もっと読む)
気圧式倍力装置
【課題】気圧式倍力装置において、回生協調時にブレーキペダルの反力の変動を軽減して操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド133を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106の推力によりマスタシリンダ110でブレーキ液圧を発生させる。液圧の反力の一部をリアクション部材155を介して入力ロッド133に伝達する。入力ロッド133が非作動状態から所定位置に前進するまで、制御バルブ132により変圧室108に大気を導入せず、リアクション部材155の反力を入力ロッド133に伝達せず、マスタシリンダ110で液圧を発生しない。このとき、液圧制御装置でブレーキ液圧を発生して回生協調制御を行ない、戻しバネ140及び反力調整バネ158によって入力ロッド133に反力を付与する。液圧制御装置の作動によるマスタシリンダ110の液圧の変動が入力ロッド133に伝達されない。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
21 - 40 / 494
[ Back to top ]