
Fターム[3D246GB04]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 挙動制御 (1,026)
Fターム[3D246GB04]の下位に属するFターム
旋回時 (261)
レーンチェンジ時 (26)
オーバステア(スピン状態)抑制 (123)
アンダステア(ドリフトアウト状態)抑制 (122)
Fターム[3D246GB04]に分類される特許
41 - 60 / 494
気圧式倍力装置
【課題】気圧式倍力装置において、回生協調時にブレーキペダルの反力の変動を軽減して操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド133を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106の推力によりマスタシリンダ110でブレーキ液圧を発生させる。液圧の反力の一部をリアクション部材155を介して入力ロッド133に伝達する。入力ロッド133が非作動状態から所定位置に前進するまで、制御バルブ132により変圧室108に大気を導入せず、リアクション部材155の反力を入力ロッド133に伝達せず、マスタシリンダ110で液圧を発生しない。このとき、液圧制御装置でブレーキ液圧を発生して回生協調制御を行ない、戻しバネ140及び反力調整バネ158によって入力ロッド133に反力を付与する。液圧制御装置の作動によるマスタシリンダ110の液圧の変動が入力ロッド133に伝達されない。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】旋回中に横転検知パラメータがパラメータ閾値を越えることによって車両の横転傾向が検知されると少なくとも1つの車輪を制動することにより横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転検知パラメータを取得するパラメータ取得手段(ロール角算出手段121)と、パラメータ閾値を設定するパラメータ計算手段127とを備え、パラメータ取得手段は、車両のロール角を横転検知パラメータとして取得し、パラメータ計算手段127は、車両のロール角の変化率である閾値計算用ロールレートを算出し、当該閾値計算用ロールレートが大きい程小さい値となるようにパラメータ閾値を設定する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することができかつ迅速に車両を減速させることができること。
【解決手段】前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、制動操作の入力量を検出する操作検出部と、車両の挙動が予め設定した条件を満たしているかを判定する挙動判定部と、挙動判定部で予め設定した条件を満たしていると判定された場合、第1制動力調整部と第2制動力調整部で付与する制動力を調整し、当該目標旋回状態量と実旋回状態量との差を小さくする挙動安定化制御を実行する制動力制御部と、を備え、制動力制御部は、挙動安定化制御の実行中に制動操作が入力された場合、制動操作の入力量に基づいて制動力の制御モードを切り換えること。
(もっと読む)
ブレーキ装置
【課題】 バルブの軸方向寸法を短くできるブレーキ装置を提供する。
【解決手段】 マスタシリンダとホイルシリンダとの間に設けられ、マスタシリンダとホイルシリンダとをつなぐ油通路21,22が形成されたハウジング20と、ハウジング20に形成され油通路21,22を断接するバルブ本体23が装着されるバルブ装着孔24と、を備え、バルブ本体23は、内部に第1油路33を有した円筒状部材であってバルブシート面34を備えたシート部材28と、バルブシート面34の半径方向に向かって延在するフランジ部35と、フランジ部35の軸方向に形成され第1油路33および油通路21とつながる第2油路36と、シート部材28のバルブシート面34に当接して第1,第2油路33,36間を断接するボール弁体37を有するアーマチュア26と、を備えた。
(もっと読む)
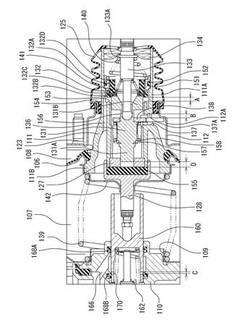
倍力装置及びこれを用いたブレーキ装置
【課題】倍力装置およびブレーキ装置において、回生協調時に液圧の変動による反力の変動を軽減してブレーキペダルの操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド135を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106を推進してプライマリピストン160を前進させてマスタシリンダ110でブレーキ液圧を発生させる。液圧による反力の一部をリアクションディスク155を介して入力ロッド135に伝達する。プライマリピストン160に液圧を発生しない遊びストロークSを設け、反力調整バネ157Cによりプランジャ131に伝達する反力を制限する。遊びストロークSの領域で、液圧制御装置でホイールシリンダに液圧を供給して回生協調制御を行ない、反力バネ159による反力を入力ロッド133に付与する。これにより、液圧制御装置の作動によるマスタシリンダ110の液圧変動が入力ロッド135に伝達されない。
(もっと読む)
ブレーキ制御装置
【課題】 回生協調制御時のペダルフィールの向上を図ることができるブレーキ制御装置を提供する。
【解決手段】 ブレーキ液が流入可能な液吸収シリンダ15と、マスタシリンダM/CとホイルシリンダW/Cとを接続する第1ブレーキ回路(管路11,18)とポンプPの吐出部10bと接続する第2ブレーキ回路(管路31)との接続位置と、第1ブレーキ回路上であって第2ブレーキ回路の接続位置よりもマスタシリンダM/C側に設けられたゲートアウトバルブ12との間の第1ブレーキ回路から分岐し、液吸収シリンダ15に接続する管路16と、この管路16に設けられたストロークシミュレータバルブ17と、を備える。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤ形式のブレーキ装置において流路抵抗によってVSA装置などの液圧制御装置の機能が低下することを防止する。
【解決手段】ブレーキ装置1を、ブレーキペダル11の操作量Psに対応して液圧を発生するマスターシリンダ15と、マスターシリンダ15とホイールシリンダ2b・3bとの間に配置される電磁弁24a・24bと、電磁弁24a・24bよりもホイールシリンダ2b・3b側に設けられ、ブレーキ液圧を発生するモータ駆動シリンダ13と、モータ駆動シリンダ13とホイールシリンダ2b・3bとを結ぶ油路22e・22f上に設けられ、ホイールシリンダ2b・3bに供給されるブレーキ液圧を制御するVSA装置26とを有し、VSA装置26の動作時に、電磁弁24a・24bを開放した状態でモータ駆動シリンダ13を所定の目標加圧モータ角θatをもって加圧側に駆動する制御ユニット6をさらに有するようにする。
(もっと読む)
ディスクブレーキ装置
【課題】ブレーキペダルの操作に伴って発生する液圧に左右されることなく、常に所定の液圧で駐車ブレーキをかけることができるようにする。
【解決手段】電動モータ10を駆動源として作動し、液圧制御ユニット2からキャリパ14内への液圧供給により推進したピストンを液圧解放後も機械的に制動位置に保持させる駐車ブレーキ機構を有するディスクブレーキ1と、駐車ブレーキスイッチ8からの駐車ブレーキ指示信号により液圧制御ユニット2からキャリパ14へ所定圧の液圧を供給させると共に、前記駐車ブレーキ機構を作動させる制御手段6とを備えたディスクブレーキ装置において、前記駐車ブレーキ指示信号が入力されたとき、ブレーキペダル4が操作されている場合に、ブレーキペダル4の操作が終了した後に、キャリパ14内の液圧が所定圧の状態で前記駐車ブレーキ機構を作動させ、駐車ブレーキ解除時に必要とする液圧が不用意に上昇するのを防ぐ。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ装置の液路に設けられた電磁弁の応答性の悪化を抑制しつつプランジャの変位による衝突音を低減する。
【解決手段】ブレーキ装置において、ソレノイドに通電することにより、バルブに連結されたプランジャをリターンスプリングのばね力に抗して閉位置に向けて駆動する形式の電磁弁を、マスターシリンダからモータ駆動シリンダに至る液路に設け、ブレーキ操作に応じて電磁弁を閉じる制御ユニットが、プランジャを駆動する際に、ソレノイドに供給される電流を所定の起動デューティー比D2に保った後に、起動デューティー比D2よりも低い起動時減速デューティー比D3に低減することにより、プランジャが閉位置に到達する際の速度を抑制するようにした。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
リザーバ
【課題】液洩れやバリの発生を抑制でき、かつ、ダイアフラムのシール力の低下を抑制できる構造のリザーバを提供する。
【解決手段】ピストン221の裏面側にプレート232やダイアフラム233およびダイアフラム233を固定するためのストッパ234を配置する。このように、ダイアフラム233をピストン221の裏面側に配置し、ピストン221とストッパ234とによる挟持力によってダイアフラム233の固定機構を構成することができる。このため、従来のようにスナップフィットやかしめによる固定機構を廃止できる。したがって、固定機構が破損することを抑制でき、固定機構の破損によるダイアフラム233でのシール不良の発生を抑制できる。これにより、調圧リザーバ20の信頼性を向上でき、システム全体の耐久性を向上させることが可能となる。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
ブレーキ装置
【課題】 管路抵抗が低いブレーキ装置を提供すること。
【解決手段】 ハウジングに形成され前記油路に連通する有底孔内に組みつけられるピストン本体の冠面と弁体との間に配置され、弁体をシート部から離間させるロッドを有し、ロッドの一端側を軸方向に摺動可能に支持する支持孔と、ロッドの他端側に支持孔の内径より大きな内径を有するロッド外周通路部と、ロッド外周通路部と有底孔内を連通する連通孔と、を備えた。
(もっと読む)
車両運動制御システム
【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
車両の制御装置
【課題】車両の旋回性能を向上させるために車両の駆動力および制動力を制御する場合に、共振の発生によるドライバビリティの低下を回避して、可及的に大きな旋回性能の向上効果を得ることができる車両の制御装置を提供すること。
【解決手段】車両の旋回走行時に駆動トルクもしくは制動トルクとして制御される制御トルクを該車両の駆動輪に付与することにより該車両のステアリング特性を変化させる車両の制御装置において、前記制御トルクを前記駆動輪に付与する際に、前記車両の共振周波数よりも低い値に設定される制限周波数以上の前記制御トルクを制限する周波数制限処理手段(ステップS4)と、前記旋回走行時に発生する前記車両の加速度に基づいて前記制限周波数を補正して更新する制限周波数補正手段(ステップS1,S2,S6)とを設けた。
(もっと読む)
41 - 60 / 494
[ Back to top ]