
Fターム[3D246MA16]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | フェイルセーフ (538) | 制御で対処(ソフトウェア的な対処) (289)
Fターム[3D246MA16]の下位に属するFターム
Fターム[3D246MA16]に分類される特許
41 - 60 / 164
制御装置故障後の自動的な再較正を有する駐車ブレーキ
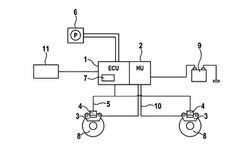
【課題】制御装置の故障後に駐車ブレーキの機能を保証し、駐車ブレーキの、開放された出発位置への自動的なまたは運転手により導入される再較正を可能にする。
【解決手段】操作エレメント(6)により操作される電気作動式の駐車ブレーキを再較正する方法であって、駐車ブレーキをロックするかまたは解除するために、前記操作エレメントにおいて実施された駐車ブレーキ要求を制御装置(1)により検知して、駐車ブレーキのアクチュエータ(4)を相応して制御する方法において、前記操作エレメントの操作後に、駐車ブレーキの移行状態を示すメモリエントリを形成し、前記制御装置の一時的な故障後に、前記メモリエントリがセットされていることを検知した場合に、駐車ブレーキを全自動で、または操作エレメントが再び操作されたあとに、規定され開放された出発位置にもたらすようにした。
(もっと読む)
液圧ブレーキシステム

【課題】液圧ブレーキシステムの改良を図る。
【解決手段】共通通路62には、増圧リニア式制御弁70,後輪ブレーキシリンダ30,増圧ONOFF式制御弁72,前輪ブレーキシリンダ28が、この順に接続される。また、後輪ブレーキシリンダ30と増圧ONOFF式制御弁72との間に流れ制限装置122が設けられ、増圧ONOFF式制御弁72を経て共通通路62に供給された作動液が後輪ブレーキシリンダ30に供給され難くされている。その分、前輪ブレーキシリンダ30に供給され易くされるのであり、前輪ブレーキシリンダ30に大きな流量で作動液を供給することができる。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】静圧相当制御中に、移動判定時間内のパルス累積値が移動判定しきい値以上になった場合には、通常時制御が実行される。それにより、ブレーキシリンダ液圧が増加させられ、車両の移動が良好に防止される。このように、パルスの累積値に基づくため、回転速度に基づく場合に比較して、車両のゆっくりした移動の有無を、正確に検出することが可能となる。また、その後、パルス無し状態が停止判定時間以上継続すれば、静圧相当制御が開始されるのであり、静圧相当制御を適切に行うことが可能となる。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、パワー液圧源7からの駆動液圧が入力可能な駆動室DCが形成されている。プライマリ室PCは吸収リザーバ91の貯留室913に接続され、駆動室DCは吸収リザーバ91の背圧室914に接続されている。プライマリ室PCと貯留室913との間には、常閉型のカット弁92が形成されている。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて、パワー液圧源7により駆動液圧を発生させ、駆動室DCと背圧室914とに供給する。
(もっと読む)
故障検出器及び故障検出方法,ブレーキ演算器及びそれを用いた鉄道車両制御システム
【課題】鉄道車両の速度検出部の故障を検出することで、速度誤認による危険側誤制御を防止する。
【解決手段】車両が速度超過した時に保安ブレーキ指令を出力する演算器と、速度センサからの速度信号に基づいて検出した車両の動き方向(前進/後退)を論理値に割り当てて出力する回路を2つと、その各々の出力(A,B)を(X,Y)=(NOT(A)∪NOT(B),A∪B)に変換する回路とを備え、演算器が(X,Y)の値に応じて故障モードを判定し、故障モードに応じて保安ブレーキ指令を決めるというブレーキ演算器を用いる。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
車両
【課題】旋回安定性を十分に高くすることができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部材と、内周面に沿って第1の係合部68が形成された固定部材58と、固定部材の径方向内方において回動自在に配設され、操舵部材の操作に伴って回動させられる回動部材59と、回動部材の外周縁に配設され、第2の係合部を備えた規制部材64,65と、操舵軸の操舵速度を検出する操舵速度検出手段と、駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有する車両であって、操舵軸の操舵速度が所定の閾値を超えた場合、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制するとともに、制動を行って車速を低下させる。
(もっと読む)
車両用制御装置
【課題】乗員により緊急停止操作が実施された場合の安全性の向上を図る。
【解決手段】乗員により緊急停止操作が実施された場合、エンジン制御装置50への給電を停止するように車両バッテリとエンジン制御装置50との間に設けられたIGリレー31を制御するとともに(S104)、安全のための装備を制御する安全系制御装置60〜65への給電を維持するように車両バッテリと車両に搭載された安全のための装備を制御する安全系制御装置60〜65との間に配設されたIGEリレー32を制御する(S106)。
(もっと読む)
自動車走行制御装置
【課題】 アクセルペダルの誤操作踏込事故を防止できる自動車走行制御装置を提供すること。
【解決手段】 アクセルペダルの急激な踏み込みを阻止する方向の抵抗力を発生する抵抗力発生機構を設け、上記抵抗力に抗してアクセルペダルを踏み込んだときオンする動作スイッチを設け、アクセルペダルアームにアクセルペダルの踏み込みによりオンするアクセルアームスイッチを設け、上記動作スイッチのオン状態において電源バッテリーを上記アクセルアームスイッチに供給可能に構成し、上記アクセルアームスイッチのオン状態において上記電源バッテリーを該アクセルアームスイッチを介して配電部に供給することにより燃料カット装置を作動し得るように構成し、上記アクセルペダルの上記抵抗力に抗しての急速な踏み込みに基づく上記動作スイッチと上記アクセルアームスイッチのオンに基づいて上記燃料カット装置を作動させる。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
液圧制動システム
【課題】 ブレーキ装置116の作動液の液圧をパイロット圧とし、そのパイロット圧に応じた圧力に作動液を調圧するパイロット圧依存調圧機能を有する液圧調整装置120を備えた液圧制動システム100において、その機能の異常を検出する
【解決手段】 液圧制動システムが備えるブレーキECU48の異常診断部482は、ブレーキ装置116に設定圧の作動液を封じ込めた状態において液圧調整装置への電力の供給を停止し、その封じ込められた作動液の圧力をパイロット圧として液圧調整装置により作動液を調圧し、その調圧された作動液の液圧に基づいてパイロット圧依存調圧機能を診断する。したがって、本液圧制動システムは、液圧調整装置への電力が断たれる状況下でなくともパイロット圧依存調圧機能の異常を検出することができる。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
車両のブレーキシステム
【課題】極力少ない電磁弁の作動によって回生協調ブレーキ制御を行うことでき、かつ、失陥時に制動力を確保可能な車両のブレーキシステムを提供すること。
【解決手段】ブレーキペダル操作によってマスタシリンダ圧を発生するタンデム型マスタシリンダと、前輪系統配管と後輪系統配管とを連通すると共に、第2マスタシリンダ室と前記後輪系統配管とを遮断する第1ポジションと、前記前輪系統配管と前記後輪系統配管とを遮断すると共に前記第2マスタシリンダ室と前記後輪系統配管とを連通する第2ポジションとを有するカットバルブと、後輪に接続され、回生力を発生可能なモータジェネレータと、液漏れ検出手段により液漏れが検出されていないときは前記カットバルブを前記第1ポジションとし、液漏れが検出されたときは前記カットバルブを前記第2ポジションに切り換えるコントローラを備えた。
(もっと読む)
車両の監督されていない動作を防止する方法およびシステム
ブレーキ装置
【課題】ブレーキ装置の電源電圧が低下した際に、そのフェールセーフ制御を効果的かつ低コストに実現する。
【解決手段】ブレーキECU200は、通常の制動制御状態においては開閉弁28,30を閉弁させつつモータ40,42を駆動し、調整弁46〜54の開度を調整することで、ポンプ32,36からマスタシリンダ14への作動液の供給を遮断しつつ、ポンプ32〜38から吐出された作動液のホイールシリンダ20への供給量を調整する。一方、ブレーキECU200は、電源電圧が開閉弁28,30の最低作動電圧よりも低い低電圧状態となった場合にもモータ40,42を駆動し、ポンプ32,36から吐出された作動液の一部がマスタシリンダ14へ供給されることを許容する。
(もっと読む)
制動制御装置
【課題】車輪間の制動力のばらつきを抑制しつつ、異常発生時にも適切な制動力を発生可能な制動制御装置を提供する。
【解決手段】第1のポンプは、右前輪ホイールシリンダ圧を増圧させて右前輪に制動力を与える。第2のポンプは、左前輪ホイールシリンダ圧を増圧させて左前輪に制動力を与える。目標液圧決定部は、制動要求を取得したとき、右前輪目標液圧および左前輪目標液圧を決定する。目標液圧決定部は、右前輪の制動力と左前輪の制動力の一方が他方よりばらつき条件を満たすほどの方が小さいと判定した場合、高い方の制動力を低い方の制動力に近づけるよう目標液圧を低減させる補正を実行する。目標液圧決定部は、右前輪および左前輪のいずれかにおいて目標液圧に対する実液圧の未達度合いが異常判定条件を満たす場合、第1のポンプまたは第2のポンプに異常が生じたと判定し、前輪左右差補正を回避する。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑え、電源電圧が低下したときのアクチュエータの制御をシンプルにできるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、電源部は、複数のアクチュエータに電圧を供給する。第1アクチュエータは、電源部から第1最低作動電圧以上の電圧を供給されると、作動して第1機能を発揮する。第2アクチュエータは、電源部から第2最低作動電圧以上の電圧を供給されると、作動して第2機能を発揮する。供給される電圧が低下したときに第1アクチュエータおよび第2アクチュエータが所定の順序に応じて作動を停止するように、第1最低作動電圧と第2最低作動電圧とが所定の電位差をもって設定される。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
41 - 60 / 164
[ Back to top ]