
Fターム[3E003DA06]の内容
Fターム[3E003DA06]に分類される特許
1 - 20 / 40
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
製函装置

【課題】 装置全体をコンパクトにすることができる製函装置を提供する
【解決手段】 開口した箱体の4つの壁面に連続した蓋フラップを折り畳んで蓋をする機能を備えた製函装置である。6軸の2つのロボットアーム11,12の先端に吸着具13,14を設ける。吸着具は、蓋フラップを折り畳むための平板13a,14aと、カートン20や小箱15を吸着する吸着ノズル13b,14bを有する。2つの吸着具で折り畳まれたカートンを開くとともに製函位置Aにセットし、また、小箱を箱体内に供給する。平板を所定の軌跡で移動させ、蓋フラップを順次折り畳み蓋を閉じる。蓋フラップを閉じたまま、1つの平板が箱体の壁面を付勢することで次段のテープ貼り装置に供給する。
(もっと読む)
箱詰め装置
【課題】構造を簡素化して製造コストを低減できる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tを列状に並べて整列させる物品整列装置14と、整列させられた複数の物品Tを列の側方に同時に押し出す物品押出し装置16と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を把持する複数のチャック90を有し、複数の物品Tを外装箱Uの内部に押し込む物品押込み装置18と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を複数のチャック90に押出し方向から案内する複数のアッパーガイド110とを備える。
(もっと読む)
箱詰め装置
【課題】製造コストやメンテナンスコストを低く抑えながら複数の物品を整列させることができるとともに、物品の姿勢の乱れを防止することができる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、第1物品T1及び第2物品T2をこの順で同一方向に連続的に搬送する物品搬送装置22と、第1物品T1を受け止めることによって、第1物品T1及び第2物品T2を所定の第1停止領域Q1及び第2停止領域Q2で次々と停止させる第1ストッパ部24aと、第1停止領域Q1より上方に第1物品T1に近接するように配置される第1押え部26aと、第2停止領域Q2より上方に第2物品T2に近接するように配置される第2押え部26bと、第1物品T1及び第2物品T2を第1停止領域Q1及び第2停止領域Q2から押し出す物品押出し装置58とを備える。
(もっと読む)
箱詰め装置
【課題】 箱詰め装置の構成を簡素化すること。
【解決手段】 押出装置7は、押出部材70を、進出動作において進出位置に進出した後、押出装置7が物品Wを外装箱Cに押し込むときまで進出位置に留めるよう構成する。
(もっと読む)
ワーク箱詰め装置
【課題】ワーク2を保持してケース6内に挿入するワーク保持挿入手段10が旋回する際に、センサの配線等が邪魔にならないようにする。
【解決手段】ワーク搬送バケットコンベヤ4によって搬送されてきたワーク2を、ワーク保持挿入手段10によって保持し、ケースコンベヤ8によって搬送されてきたケース6内に挿入する。ケース6内にワーク2を複数段積み重ねて挿入する場合、1段ずつ逆向きにして重ねるためにワーク保持挿入手段10を180度旋回させる。ワーク2が保持されているか否かを検知するためのセンサとして、光電管48を固定側のケースコンベヤ8の側方に設け、反射ミラー90をワーク保持挿入手段10側に設ける。ワーク2を保持しているときは光電管48からの光がワーク2によって拡散され、保持していないときには、ミラー90によって反射されるので、ワーク2の有無を検知できる。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】 フラップ拡開手段が簡単な構造にでき、箱詰め装置の構造をシンプルにしてコンパクト化を図ること
【解決手段】 4つの上部フラップ6a〜6dが開いた状態の外箱5に対し、複数の小箱1からなる小箱群2を収納する箱詰め装置である。第1,第2上部フラップ6a,6bを抑え板を用いて拡開状態に保持し、ロボットアーム装置の吸着ヘッド41で保持した小箱群を傾けながら下降移動させて第3上部フラップ6cに対して当接させて押し広げ、次いで傾き方向を変えて小箱群にて第4上部フラップ6d押し広げることで、外箱の上方を広く開放する。その後、小箱群の姿勢を垂直に戻し、外箱の開口部位に合わせて下降移動させて収納するようにした。
(もっと読む)
自働包装機
【課題】今までの射出成型機から直接包装する装置は製品の方向がないので袋内で不定状態となり、製品の曲がりや、シール機での挟み等が起き不良が起った、又ロール状のシートの場合は包装機にシートを設定する場合に先に製袋機により袋を作成する必要があり、二度手間であった。製袋と包装を同時に解決するプラスチック射出成型用自働包装機を提供する。
【解決手段】原反ビニールシート1を本機の袋作成装置で作成し、射出成型機から放出された成型品を整列機に投入し、袋に投入する事により、成型品の曲がりがなくなり、シートの長さが旧機の半分になり、幅が狭くなったので、全体の梱包状態が小さくなり、袋のコストも半分になり、機械の停止も少なくなって生産性が上った。
(もっと読む)
箱詰装置
【課題】箱内に容易に商品を収納することができる箱詰装置を提供することである。
【解決手段】本発明に係る箱詰装置100においては、複数の包装物800が板部材駆動装置200,包装物移動装置300および姿勢制御装置400により支持され、当該複数の包装物800を箱500に挿入する場合に、箱500の外側より箱500の辺501,〜,504を変形するよう開口部変形装置560により力が付与される。それにより箱500の枠体である辺501,〜,504が曲線状になり、包装物800を確実に収納することができる。
(もっと読む)
ワーク移載装置、ケーサーシステム、およびワーク移載方法
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】フレームに組みつけられたワーク移載装置300であって、チャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に取り付けられ、第一形態から第二形態へワークWの配列を変換するための駆動力を発する動力源と、この動力源に接続された歯車部材と、フレームに少なくとも一部が固定され、第一位置から第二位置への配列変換部20の移動軌跡を規定し、歯車部材に噛み合う歯が形成された歯付き部材と、を備える。
(もっと読む)
間欠式物品挿入装置
【課題】プッシャ機構のワークエリアを小さくし、カートニングマシンの設計の自由度を高め、挿入効率も高める間欠式物品挿入装置を提供すること。
【解決手段】 物品挿入装置100は、コンベア201と202を用いてカートンCと物品Bとを同速で並進させ、その進行方向に直角な方向から物品BをカートンC内に挿入する装置であって、物品Bの上空に配した複数の掻込アーム121と、物品Bの載置間隔毎に前記複数の掻込アーム121を前記進行方向に直角な向きで一列に軸通する前記進行方向に配したアーム支持軸103と、アーム支持軸103を進行方向に移動させる並走用モータ105と、アーム支持軸103を進行方向に直角な方向に移動させる挿入用モータ106と、アーム支持軸103を軸回動して総ての掻込アーム121を一斉に上方に起き上がらせる軸動アクチュエータ107と、を具備する。
(もっと読む)
メロンの箱詰装置
【課題】果柄が真上からやや側方にずれるようメロンを傾けて箱内に収納することにより、メロン収納用の箱の高さを低くできるメロンの箱詰装置を提供すること。
【解決手段】果柄Dを上にして載せられたメロンBを搬送する搬送装置の末端部に設けたメロン待機部2と、メロン待機部2に隣接して設置した空箱待機部と、メロンBを保持・解放可能であり、メロン待機部2の上方と空箱待機部の上方との間を往復可能、且つ、昇降可能な吸盤とを備え、メロン待機部2を搬送装置の幅方向に傾斜させる傾動装置8を設けてある。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
箱詰め装置
【課題】互いに接触または近接した状態で搬送された複数の箱詰め対象体を互いに離間した状態で箱体に箱詰めする。
【解決手段】互いに接触または近接した状態で搬送された複数のテープカートリッジ200を所定長さだけ互いに離間した状態で整列させる整列機構11と、離間して整列された各テープカートリッジ200の整列状態を維持しつつ各テープカートリッジ200を保持して箱体に箱詰めする箱詰め機構13とを備え、整列機構11は、互いに接触または近接した状態で搬送された各テープカートリッジ200を1つずつ独立して載置可能に構成された複数の載置部22a〜22eと、各載置部22a〜22eにそれぞれ取り付けられた被案内部と、載置部22a〜22eが所定長さだけ互いに離間するように被案内部23a〜23dを案内する案内部24a,24bと、案内部24a,24bを移動させるエアシリンダ25とを備えて構成されている。
(もっと読む)
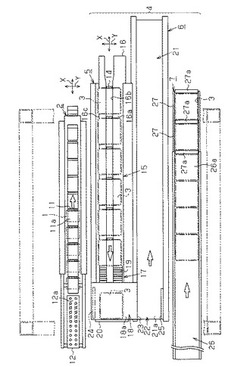
カートン内に物品を梱包するための装置
連続的に物品(B)を梱包するための梱包装置(10)は、第1コンベアライン(23)と、第2コンベアライン(22a,22b,22c)と、第1コンベアから第2コンベアへと物品(B)を一次カートンもしくは中間カートン(C)内に搬送するか、または一次カートンもしくは中間カートン(C)を前記第2コンベアラインから物品(B)へと搬送する移送機構(26a,26b)と、第2移送機構と、を具備し、第2移送機構は、二次カートンもしくは最終カートン(T)に梱包される一次カートンもしくは中間カートン(C)を第1処理ラインから第2処理ラインへと移送するか、もしくは二次カートンまたは最終カートン(T)に直接梱包される物品(B)を第1コンベアから第2コンベアへと搬送するか、物品(B)もしくは梱包された物品(B)の向きを変えるために形成されているか、または休止して一次カートンもしくは中間カートン(C)がさらなる処理のために通過することを可能にしている。 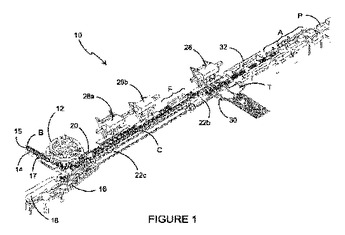 (もっと読む)
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
箱詰装置
【課題】袋状の包装物を簡易な構成で箱詰することができる箱詰装置を提供することである。
【解決手段】箱詰装置100,100aにおいては、一対の開閉機構260,261が包装物移動装置300から搬送された複数の包装物800の鉛直下面に設けられ、当該一対の開閉機構260,261の動作に同期して、板部材駆動装置200が、複数の包装物800の鉛直上方向から、複数の孔220の形成された板部材210を用いて複数の包装物800をダンボール箱500に押下する。
(もっと読む)
段積み包装機
【課題】扁平状固形物の段積みを自動的に行うための装置として、小型化が可能な包装機に適用できる段積み包装機を提供する。
【解決手段】開口部が上方を向くように袋体2を保持する袋体保持部50と、開口部の上方であって水平面に対して傾斜して設けられ、扁平状固形物3の自重により上端から下端に向かって扁平状固形物3をスライドさせ、扁平状固形物3を袋体2の所定の底縁部2aに向かって落下させるガイド部32と、所定の底縁部2aに当接せず袋体2の底部の一部に当接し且つ所定の底縁部2aに向かって落下した扁平状固形物3を傾斜した状態で支持する第一の位置と袋体2に当接しない第二の位置とに移動可能なストッパ60と、少なくとも2個の扁平状固形物3が所定の底縁部2aに落下するまでストッパ60を第一の位置に位置させ、その後にストッパ60を第二の位置に移動させる制御部90を備える。
(もっと読む)
箱詰装置
【課題】簡易な構成で確実に包装物を一律に重ね合わせ、箱詰を行うことができる箱詰装置を提供することである。
【解決手段】箱詰装置100においては、第1搬送部200と、第1搬送部200の下方に設けられた第2搬送部400,410とを備える。第1搬送部200の下流端部には、下方に傾斜する傾斜部210が設けられる。柔軟な薄状体によって包装された包装物110が第1搬送部200から第2搬送部400へ落下され、集積部AR1において重ね合わせられる。包装物110は、第2搬送部400,410により第1搬送部200の搬送方向と逆方向の矢印M2の方向に搬送される。
(もっと読む)
1 - 20 / 40
[ Back to top ]