
Fターム[3E054DD02]の内容
包装位置への供給−物品の供給 (7,769) | 供給手段(コンベア) (511) | バケットコンベア (87)
Fターム[3E054DD02]に分類される特許
41 - 60 / 87
食材充填カップにおけるカップと蓋の柄合わせ装置
【課題】 本発明は、カップの側面柄と蓋の上面柄の柄合わせを確実簡易に行うことのできる食材充填カップにおけるカップと蓋の柄合わせ装置を新規に提供するものである。
【構成】 本発明は、間歇走行するリテーナーコンベアに側面柄を付したカップを無雑作に吊下げして該カップ内に食材を充填するようにした装置において、該リテーナーコンベアの食材充填後の間歇走行区間下に食材を充填したカップを吸着してリテーナーコンベア上に上動し回転させる手段と該手段のリテーナーコンベアを挟んだ上方に該カップ内食材のはね飛散を防止するはね防止板と、上動した該カップの側方にカップの側面柄を読み取って一方向に向け揃えする回転制御センサーとを設けて、食材を充填した各カップの側面柄を該リテーナーコンベア上において一方向に向け揃えして、同方向に上面柄を向けた蓋の被着により各カップの側面柄と蓋の上面柄とを直列に柄合わせするようにしたのである。
(もっと読む)
食材のカップ内落入装置

【課題】 本発明は走行するカップ内に食材をはみ出すことなしに落入させることを可能とした食材のカップ内落入装置を新規に提供するものである。
【構成】 本発明は走行するカップ内に上方の繰出口より順次繰出す食材を自動連続落入するようにした装置において、該食材を該繰出口より縦回転するバケットにて順次受取り、該バケットの縦回転下動時に位置決めバーにて該受取り食材を当て受けして位置決めしておいて直下のカップ内に自動連続落入するようにしたことを特徴とする食材のカップ内落入装置にある。
(もっと読む)
少なくとも2個の複合の垂直成形筒体を具備するパッケージ製造設備
少なくとも2個の複合の垂直成形筒体を具備するパッケージ製造設備であり、上記設備は、少なくとも2個のそれぞれ離れた平行な行路をなす移送器具D、D’を備えた、単一の、モータ駆動の、中央部を通るコンベヤーを具備し、一時的に停止しつつ前進する前記行路は、前記設備の中央にある主モータCによって駆動される、パッケー製造設備。 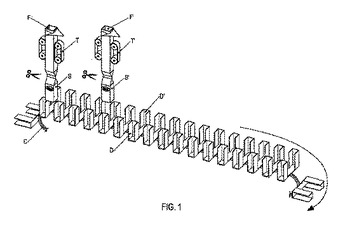 (もっと読む)
(もっと読む)
卵の処理装置の充填本体部
【課題】 単列コンベアから放出された所定個数の卵を移載装置の卵収容座で受け止める際に、隣接する卵同士の衝突を防止することのできる卵の処理装置の充填本体部を提供する。
【解決手段】 分配コンベア10(単列コンベア)の卵Eを把持する把持部材11〜15のピッチP1と、移載装置20が具備する卵収容座21〜25のピッチP2との関係をP1<P2とし、前記分配コンベア10を所定の搬送速度で駆動させて、当該分配コンベア10により搬送される所定個数(例えば、5個)の卵E1〜卵E5の、最上流側の卵E5から順に直近下流側の残りの卵Eを所定時間ずつ遅延させて順次放出するよう構成した。
(もっと読む)
箱詰め装置
【課題】棒状体2を容器3に詰める箱詰め装置1において、設置面積の拡大を必要とせず、かつ低コストで、棒状体2の傷みやすさや詰込み状態の嵩高のようなバラ詰み方式の欠点を抑制する。
【解決手段】箱詰め装置1は、箱詰め位置5にて容器3の左端が右端よりも上方に配されるように容器3を水平方向に対して傾斜させる容器傾斜手段22を備える。これにより、傾斜した容器3に棒状体2が順次に供給されると、棒状体2は自重により容器3内を転がり、右下から左上に順次規則的に層状に詰まれていく。この結果、棒状体2が傷付いたり詰込み状態が嵩高になったりするのを抑制できる。また、容器傾斜手段22は、空気圧シリンダ26で容器3の一端を押し上げること等により簡便に構成できるので、設置面積を拡大することなく安価に設けることができる。
(もっと読む)
搬送移載装置
【課題】複数の物品を迅速にしかも繰り返し確実に容器へ挿入でき、しかも複数の物品を重ねて挿入できる搬送移載装置を提供する。
【解決手段】搬送移載装置4は、多段トレー5と、搬送手段6と、吸着パッド7,8と、吸着パッド7,8の位置を相対的に接近又は離間させる変位手段と、移送手段9と、容器供給手段10とを備える。物品1,2は、互いに高さを違えるように多段トレー5に載せられる。搬送移載装置4によれば、搬送手段6が多段トレー5と共に物品1,2を搬送し、これらの物品1,2を吸着パッド7,8にそれぞれ吸着させた状態で、上記の変位手段が、吸着パッド7,8を相互に接近させることにより、物品1,2を重ね合わせた後、物品1,2を容器3に挿入できる。
(もっと読む)
集積物品のケース投入装置
【課題】 簡素な構成により、薄板状物品をスムースにケースに投入すること。
【解決手段】 集積物品のケース投入装置100であって、把持装置40により把持されて集積された複数の薄板状物品1をケース2に投入するに際し、ケース2の投入部2Cを拡開する拡開ガイド43(拡開手段)を該把持装置40に備えるもの。
(もっと読む)
卵の移載装置
【課題】 卵を次位コンベアへ移し替える処理を安定して、かつ、高速で処理することができる卵の移載装置を提供する。
【解決手段】 搬送幅方向にそれぞれ摺動自在なN個の収容座を有する卵移送ユニット3が搬送される過程で当該卵移送ユニット3の収容座ピッチを次位コンベア20の条方向の収容座ピッチと略等しいピッチに狭める規制板4を備え、前記規制板4により次位コンベア20の条方向の収容座ピッチと略等しいピッチに狭められた前記卵移送ユニット3が前記次位コンベア20上に到来した際に、当該卵移送ユニット3を前記次位コンベア20の搬送方向と同一方向に付勢させて当該卵移送ユニット3の前記付勢方向への移動速度を前記次位コンベア20の搬送速度と実質的に同期させるとともに、当該卵移送ユニット3の収容座に収容している卵Eを次位コンベア20の収容座に一括放出させる加速兼放出手段5を備えた。
(もっと読む)
包装システムならびにその制御方法
【課題】後処理装置22が停止しても良品のPTPシート1を系外に排出する必要がなく、かつ、包装システム10を停止してもポケット2に収容された内容物5が熱による劣化を生じない包装システム10を提供する。
【解決手段】基材シート6に形成されたポケット2に内容物5を充填する充填装置14と、シート状の蓋材4を基材シート6に熱圧着してポケット2の開口部を閉塞する蓋取付装置18と、基材シート6および蓋材4の接合体からPTPシート1を打ち抜く打抜装置20と、PTPシート1を後処理装置22へ向けて搬送する搬送装置24とを備える包装システム10に対して、さらに、後処理装置22が停止したときに後処理装置22に代わってPTPシート1を受け入れるバッファ装置32を搬送装置24の下流側に配設することにより上記課題を解決することができる。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
集積装置およびこれを備えた箱詰め装置
【課題】1台の装置内において、複数の集積パターンによって物品の集積を効率よく行うことが可能な集積装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1では、搬送装置10から搬送されてくる商品X1,X2を、互いに並列に配置された2つの集積処理部(搬送機構30および吸着搬送機構40)において、異なる集積パターンによって集積処理を行う。そして、搬送機構30と吸着搬送機構40とにおいてそれぞれ集積処理された商品X1,X2を、共通の排出位置である排出装置50の2Fの階層部分から下流側に配置されたフラップ開口装置60の方へ排出する。
(もっと読む)
箱詰装置
【課題】 本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】 個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記一群の袋について、前記厚み検出手段より検出される前記各個別の袋の厚みを加算し、または前記厚み検出手段より検出される前記各個別の袋の厚みを所定値から減算する演算手段と、を備えることを特徴とする。
(もっと読む)
箱詰装置
【課題】本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記検出手段により検出される厚みに基づいて、前記一群の袋を前記規定サイズの箱に詰めることの適否を判断する判断手段と、記判断手段によって不適と判断される場合に、前記一群の袋のうち交換すべき袋を選択する選択手段と、を備えることを特徴とする。
(もっと読む)
集積装置
【課題】物品のサイズに応じて搬送手段の長さが変化することにより、物品のサイズの大小に拘わらず、物品の姿勢が不安定になることなく姿勢変更手段に渡すことができる集積装置を提供する。
【解決手段】物品Mを水平姿勢で第1の方向Xに搬送する搬送手段10と、物品Mを受け取って、物品Mの側面が第1の方向Xおよび鉛直方向に沿った起立姿勢に姿勢を変更させる姿勢変更手段20と、物品Mを第1の方向Xに直交する第2の方向に重ねた整列状態となるように集合させる整列手段40とを備え、搬送手段10が第1の方向Xに伸縮可能で、搬送される物品Mの第1の方向Xの長さに応じて搬送手段10が伸縮して搬送手段10と姿勢変更手段20との間の空間の距離を変更可能であることを特徴とする。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】物品群の保持への床の開閉動作の影響を排除することによって、箱詰め作業のトラブルを抑制する箱詰め装置及び箱詰め方法を提供する。
【解決手段】物品を整列させてなる物品群を整列方向から挟圧する挟圧ステップS3と、挟圧された物品群が載っている床を開放する開放ステップS7と、挟圧された前記物品群の上面に吸引ヘッドを接触させて物品群の上面を吸引して保持する保持ステップS4と、開放ステップS7後に吸引ヘッドを降下させることによって床の下方の外装箱に物品群を押し込む押し込みステップS8と、を有する、箱詰め方法であって、開放ステップS7の前に吸引ヘッドを物品群が床から離れる程度上昇させた状態とする上昇ステップS5を有する。
(もっと読む)
箱詰め装置
【課題】複数の収容個数の物品が並置された状態で整列コンベアに供給される場合において、収容個数の物品がそれぞれ収容部内の所定の位置に収容された状態を検出することができる箱詰め装置を提供する。
【解決手段】反転部16Eにおける一連の仕切板10の延伸端を結んで形成される円弧Mよりも外周側において収容位置Rにおける接線方向に延びる検出用光路L1,L2が複数水平方向に並列するようにして配設されている複数の遮光形検出器2A,2B,3A,3Bと、遮光形検出器2A,2B,3A,3Bの検出信号に基づいて無端軌道16を制御する制御装置と、を有する。
(もっと読む)
物品移載装置
【課題】バケットコンベアのバケットに個別保持された物品を複数個ずつ押し出して次工程へ送り出すに際し、次の作業がやりやすい形に物品をまとめられるようにする。
【解決手段】バケットコンベア10の複数のバケット11に個別保持された複数の物品2は、第1押し出し装置30により中間保持部20の物品受入部21に押し出される。中間保持部20には押し出しバー41が配置されており、押し出しバー41は第2押し出し装置40により、物品受入部21における物品2のオーバーランを止める第1位置から物品受入部21内の物品2の背後に回り込む第2位置へ、さらに物品2を物品受入部21から移載チャック120への受け渡し箇所へと押し出す第3位置へと順次変位せしめられる。
中間保持部20と受け渡し箇所の間には、中間保持部20から押し出された複数の物品2を密集状態にするテーパ状ガイド23が設けられている。
(もっと読む)
葉状農作物の選別・包装システム、および、葉状農作物の選別・包装方法
【課題】大葉等の葉状農作物をそのサイズや形状等に基づいて選別し、これをきれいに積み重ねた束とし、さらにこれを包装することのできる葉状農作物の選別・包装システムの提供。
【解決手段】葉状農作物aを搬送供給する供給コンベアBと、その葉状農作物aを1枚ずつ取り出す取出装置Cと、上各葉状農作物aのサイズを判定する葉状農作物検査手段と、その判定結果に基づいて各葉状農作物a……を選別し、積み重ねて束とする選別ロボットE1,E2と、上記束を包装する自動包装機Hとを備えた葉状農作物の選別・包装システム。また、積み重ねた状態の葉状農作物a……を、1枚ずつ取り出してそのサイズを判定し、その判定結果に基づいて葉状農作物a……を選別し、束にして搬送し、これを包装する葉状農作物の選別・包装方法。
(もっと読む)
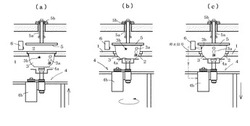
充填包装装置および方法
【課題】縦長の容器本体に内容物を充填し、蓋締めして、連続的に商品を製造する装置および方法を提供する。
【解決手段】多数のアタッチメント2を搬送しながら、該アタッチメント2に容器本体12を投入し、前記容器本体12内に内容物Mを充填し、前記容器本体12の上方の上端部12pにキャップ11を載置し、前記容器本体12上のキャップ11の姿勢が乱れている場合に、これを整え、その後、前記キャップ11を前記容器本体12の上端部12pに結合させて包装し、前記包装された商品1をアタッチメント2から排出する。
(もっと読む)
商品の自動段積み方法及びその装置
【課題】吸盤及び該吸盤を制御する各種の空圧機器を必要とせず、無駄な空間を無くしたカップ状商品や各種の商品を段積みすることができる自動段積み装置を提供。
【解決手段】商品を適数列に搬送するコンベア1の先端部に、商品Gの一段分を支持するローラコンベア2が設けられ、ローラコンベア2の各ローラ2a間には各ローラ2aと同方向の櫛歯14aを有し、商品Gの一段高さ分を上昇させてその下方に次の一段分の商品Gを受け入れる昇降ユニット14が設けられ、昇降ユニット14上及びローラコンベア2上の商品Gの両側且つに櫛歯14a間に下降する櫛歯16aを有し、ローラコンベア2と同方向へ横行する櫛状の横行ユニット16が設けられてなる自動段積み装置。
(もっと読む)
41 - 60 / 87
[ Back to top ]