
Fターム[3F027AA02]の内容
Fターム[3F027AA02]に分類される特許
141 - 160 / 211
板状体移載設備
【課題】合流処理しての搬出を、搬送による板状体の損傷や、搬送姿勢や搬送停止位置の乱れを減少して行え、高速搬送を容易に実現した板状体移載設備を提供する。
【解決手段】複数並列した搬送装置10A,10Bの端部外方間に、各搬送装置からの板状体5,6を受け入れて合流処理したのち搬出する合流処理装置20を配設した。合流処理装置は、搬送装置に対向したそれぞれの縦送りコンベア部21A,21Bと、縦送りコンベア部間に位置した仮置き部31と、縦送りコンベア部と仮置き部とに亘ってそれぞれ設けた横送り手段41A,41Bからなる。横送り手段にはそれぞれ、昇降自在でかつ縦送りコンベア部と仮置き部とに亘って移動自在な板状体支持部70A,70Bを設け、板状体支持部は昇降によって、縦送りコンベア部の搬送面21a,21bや仮置き部の仮置き支持面31aに対して出退動自在に構成した。少なくとも1つの縦送りコンベア部に、単数枚搬送装置130に対して板状体を搬出可能な板状体渡し域90を形成した。
(もっと読む)
仕分け設備

【課題】横桟の位置ずれが大きい場合でも正常位置に戻し得る仕分け設備を提供する。
【解決手段】無端ベルト体44の上下面の各前後に配置された横桟45により書籍の案内空間部Sが設けられた仕分けコンベヤ31における横桟の位置ずれを修正するための位置ずれ修正装置101を書籍の供給位置よりも上手側に配置し、この位置ずれ修正装置を、仕分けコンベヤに設けられた被検出板体102を検出して当該コンベヤを検出し得る検出センサ103と、当該検出センサから所定距離だけ下手側に配置されて仕分けコンベヤの下面の横桟を検出する横桟検出手段104と、前記検出センサからの検出信号を入力して前記横桟検出手段に検出動作信号を出力する検出動作指示部113と、前記横桟検出手段からの出力信号を入力して横桟が位置ずれしていると判断した場合に、回動力付与手段61に作動信号を出力して横桟の位置ずれを無くすための位置ずれ修正指示部114とを具備したもの。
(もっと読む)
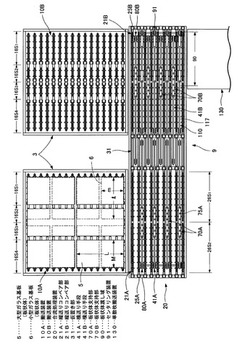
板状体移載設備
【課題】分散処理しての搬出を、搬送による板状体の損傷や、搬送姿勢や搬送停止位置の乱れを減少して行え、高速搬送を容易に実現し得る板状体移載設備を提供する。
【解決手段】単数枚搬送装置9で搬送してきた板状体5,6を受け入れて横方向で分散処理したのち、搬送装置10A,10B,10C群に搬出する分散処理装置20は、各搬送装置に対向し、板状体受け入れ域130を形成した縦送りコンベア部21A,21B,21Cと、縦送りコンベア部間に位置した仮置き部31,36と、縦送りコンベア部と仮置き部とに亘って設けた横送り手段41A,41B,41Cからなる。各横送り手段にはそれぞれ、昇降自在でかつ縦送りコンベア部と仮置き部とに亘って移動自在な板状体支持部70A,70B,70Cを設け、縦送りコンベア部の搬送面21a,21b,21cや仮置き部の仮置き支持面31a,36aに対して出退動自在に構成した。
(もっと読む)
コンベヤベルトの消費電力特性の評価方法、およびベルトコンベヤ装置の消費電力の推定方法
【課題】コンベヤベルトの使用経過時間、配置環境、使用環境の影響なども加味された消費電力特性を求める方法、および消費電力の推定方法を提供する。
【解決手段】コンベヤベルトをベルトコンベヤ装置に装着した後の、複数の装着後経過時間それぞれにおける、前記コンベヤベルトの消費電力情報と、前記複数の装着後経過時間それぞれにおける、前記コンベヤベルトの設置地域の気温情報を取得し、前記複数の装着後経過時間それぞれの情報と、前記消費電力情報および前記気温情報と、を用いて、前記コンベヤベルトの消費電力特性を表す特性値を求める。
(もっと読む)
ワーク搬送装置
【課題】パレットを用いることなく、ワークを精度良く且つ効率的に搬送する。
【解決手段】軌道を異にする第1搬送テーブル51および第2搬送テーブル61により、共通の給材位置と共通の除材位置との間でワークを交互に搬送するワーク搬送装置20Aであって、ワークがセットされる第1搬送テーブル51およびこれを支持する第1テーブル支持部材52から成る第1テーブルユニット43と、ワークがセットされる第2搬送テーブル61およびこれを支持する第2テーブル支持部材62から成る第2テーブルユニット44と、給材位置と除材位置との間で、第1テーブルユニット43と第2テーブルユニット44とを同時に且つ交互に移動させる移動手段45と、移動手段45による移動途中で、ワークを含む第1テーブルユニット43の軌道およびワークを含む第2テーブルユニット44の軌道を相対的に変更する軌道変更手段とを備えた。
(もっと読む)
コンベヤ装置
【課題】本発明は、ガイドに擦れて搬送物が移動するとき、この搬送物がガイドに引っ掛かることなく、かつ光センサにより搬送物の通過を検出できるコンベヤ装置を提供することを目的とする。
【解決手段】搬送面1に沿ってその左右両側上方にガイド3を配置し、これら左右のガイド3により搬送面1上に搬送路Xを設定し、本2をガイド3により案内しながら搬送路Xに沿って搬送するコンベヤ装置において、搬送路Xに沿って搬送面1により搬送される本2の通過を検出する光センサ6a,6bをそれぞれガイド3の搬送路Xに面しない裏面側に設け、またガイド3の搬送路Xに面した表面を、段差、凹凸および隙間が無い滑らかな面に形成し、また光センサ6を設ける位置のガイド3の裏面を削って、ガイド3の厚さを光センサ6より照射される光が透過するよう薄くした薄肉部12を、ガイド3の表面に設ける。
(もっと読む)
ベルト調整装置、ベルト調整方法および搬送装置
【課題】精密部品の精密検査等で部品を搬送するために用いられるベルト搬送装置において、特に、当該搬送用のベルトがスチール製であって、駆動プーリーと従動プーリーとの間隔が狭く、かつ、ベルトの横幅が広いものについて、ベルトの走行位置を所望の高精度で調整することができるベルト調整装置、ベルト調整方法および当該ベルト調整装置を具備する搬送装置を提供する。
【解決手段】本発明に係るベルト調整装置は、プーリーで駆動されて物品を搬送するベルトの蛇行を防止して周動位置を調整するベルト調整装置において、ベルトの周回毎に、ベルトの周方向基準位置を検出する位置検出手段と、周方向基準位置における、ベルトの横方向基準位置に対する変位量を検出する変位検出センサと、変位量に応じて、一方のベルトエッジと、他方のベルトエッジとの間で周長差を生じさせるようにプーリーの配置を制御するプーリー制御機構とを具備する。
(もっと読む)
被搬送物移送装置
【課題】エンドレスベルト等のエンドレス体の横ずれまたは被搬送物の横ずれを検知するに有利な被搬送物移送装置を提供する。
【解決手段】被搬送物移送装置は、被搬送物2を載せる載置面10をもつエンドレス体1と、エンドレス体1をこれの長さ方向に沿って回転させて走行させる駆動機構4とをもつ。エンドレス体1の載置面10および被搬送物2のうち少なくとも一方は、エンドレス体1の走行方向に沿って並設された複数の検知マーキング5をもつ。検知マーキング5を載置面10の垂直方向から視認するとき、各検知マーキング5においては、エンドレス体1の走行方向(矢印X1方向)に沿ったマーキング幅がエンドレス体1の幅方向において異なるように設定されている。
(もっと読む)
放出供給部を有するコンベヤアセンブリ、このようなコンベヤアセンブリを有する書類処理ライン、および製品放出方法
【課題】製品を放出するために適した放出供給部を有するコンベヤアセンブリであって、処理している間、製品が間違って放出されたり、詰まってしまったり、遅延の理由となる他の製品処理を妨げることを防止するコンベヤアセンブリを提供する。
【解決手段】上流ベルトコンベヤ2は、排出端部2aによって、下流ベルトコンベヤ3の供給端部3aに連結され、 排出端部2aは、排出端部リターンプーリ10aによって画定され、供給端部3aは、供給端部リターンプーリ11aによって画定され、排出端部リターンプーリ10aおよび/または供給端部リターンプーリ11aは、二つのリターンプーリ10a,11aの間の放出開口を形成するために、各コンベヤ2,3の搬送面に平行な面内でコンベヤ2,3の搬送方向Tに沿って移動可能に配置されている。
(もっと読む)
コンベヤベルトのモニタリング方法および装置
【課題】コンベヤベルトの蛇行による磁気センサの測定値の狂いを是正し、高精度のモニタリングを可能としたコンベヤベルトのモニタリング方法および装置を提供する。
【解決手段】ゴム磁石3をコンベヤベルト2に埋設し、ゴム磁石3が通過する位置に配設した磁気センサ4により、ゴム磁石3の磁力の変化を測定することにより、コンベヤベルト2の状態の変化を検出するようにしたコンベヤベルト2のモニタリング方法において、コンベヤベルト2の蛇行量を、蛇行測定手段により測定し、その測定した蛇行量に基づいて、磁気センサ4により測定したゴム磁石3の磁力の測定値を補正して、コンベヤベルト2の状態の変化を検出する。
(もっと読む)
搬送システム
【構成】 シュート上の物品をセンサが所定時間以上継続して検出すると、シュートのコンベヤと分岐器とを停止させ、待機時間経過後に短時間コンベヤのみを再起動する。この間にセンサが物品を検出しなくなると、コンベヤを動作させると共に分岐器も作動させ、物品を検出したままの場合、再度待機時間の間待機する。
【効果】 シュートの下流側に空きスペースができると、シュートを自動的に再起動できる。
(もっと読む)
搬送方向と同方向の強度が軟弱な板状体の定規出し方法及び定規出し装置
【課題】搬送方向と同方向の強度が通例よりも一段と軟弱な板状体が混在する場合であっても、適確な定規出し処理を行うことができるようにする。
【解決手段】ベルトコンベアAの搬送方向下手側に備えた起伏式のストッパBに、板状体3の先端を当接させて、該板状体3の定規出しを行うに際し、ストッパBに当接した板状体3の先端近傍が所定限度以上の高さに座屈した場合に限っては、板状体3の先端が、ストッパの位置(定規部材の位置)UからベルトコンベアAの搬送方向上手側へ所定距離L隔てた、所定の隔離位置Vに至るまで、板状体3を一旦逆向きに搬送すべく、ベルトコンベアAを逆転駆動させた後に、ベルトコンベアAを停止させ、次いで、板状体3を前記所定距離Lだけ搬送するに足る短期間だけ、再びベルトコンベアAを正転駆動させることによって、板状体3の先端をストッパBに当接させ、定規出しを行う。
(もっと読む)
ワーク搬送装置
【課題】省スペース化を図りつつ、複数のベルトコンベアによりそれぞれワーク処理装置に移載可能なように、ワークを搬送する。
【解決手段】それぞれがワーク処理装置2に向かってワークWを搬送する複数のベルトコンベア31を、上下方向に複数段に亘って配設したワーク搬送システム3であって、複数のベルトコンベア31の複数の搬送終端部は、ワークWを移載するための上方スペース22が確保されるように、階段状に配設されている。
(もっと読む)
ベルトコンベアの縦裂き検知方法および装置
【課題】非接触でベルトコンベアの縦裂きを検知する方法および装置を提供する。
【解決手段】ベルトコンベアの下面にスリット光を照射し、得られた光切断像を工業用カメラにて撮像後、画像処理装置にて手順1.2値化処理、手順2.膨張、収縮処理によるノイズ除去、手順3.ラベリング処理の順で画像処理を施し、ベルトコンベアの幅方向をX軸、ベルトコンベアの搬送方向をY軸とする2次元画面において、XY座標でラベリング処理された連結画素で構成される画像を得、前記画像より段差部や隙間などのベルトコンベアの縦裂き検知情報を得る。
(もっと読む)
パイプコンベヤの捩れ状態検出装置
【課題】搬送ベルトの丸められた部分の蛇行角度と潰れの度合を容易にかつ精度よく検出する。
【解決手段】搬送ベルト10の端部に永久磁石2を所定の間隔で設置し、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むようにループコイル31〜38を円周状に配列するとともに、上記ループコイル31〜38の円周方向外側にループコイル41〜48を配列して、上記各ループコイルの出力信号のピーク値を検出した後、上記ループコイル31〜38の上記ピーク値を比較して上記搬送ベルト10の蛇行角度θを演算し、上記θが許容範囲内にある場合には、上記θ方向に位置する内側のループコイルのピーク値PKと外側のループコイルのピーク値pkとの比から、永久磁石2と内側のループコイルとの距離rを演算して、上記パイプ状に丸められた搬送ベルト10の重合位置を特定するようにした。
(もっと読む)
パイプコンベヤ及びその捩れ監視方法
【課題】比較的簡易な機構で帯ベルトの捩れを監視することができるパイプコンベヤ及びその捩れ監視方法を提供する。
【解決手段】帯ベルト10が駆動ローラ2及び従動ローラ3間に無端回送されるように架け回されている。ローラ2,3間の上側の往走路及びローラ2,3間の下側の復走路において帯ベルト10が丸めローラによりパイプ状に丸められ、パイプ形状を保ったまま保形ローラ4に案内されて走行する。往走路において被搬送物Mが投入され、駆動ローラ付近において被搬送物を荷受けホッパへ放出する。パイプ状の帯ベルト10の外周に対峙して2個の非接触式センサ11,12が配置されている。非接触式センサ11,12の間は、側縁部10Aの存在許容範囲(正常範囲)である。
(もっと読む)
パイプコンベヤの捩れ検出装置及び捩れ矯正装置
【課題】パイプコンベヤの搬送ベルトの丸められた部分の捩れ状態を精度よく検出することのできる捩れ検出装置とこの捩れを矯正する捩れ矯正装置とを提供する。
【解決手段】往路ベルト11aの丸められた部分の外周側に圧接する矯正ローラ22を複数個とし、かつ、隣接する2つの矯正ローラ22a,22bとを上記搬送ベルト11の走行方向に対して線対称に配置するとともに、上記矯正ローラ22の支持フレーム23に取付けられたローラ軸24にトルク検出手段27を設け、上記ローラ軸24に作用するの捩れトルクから上記往路ベルト11aの捩れ状態を検出する。また、上記ローラ軸24の他端側に取付けられる回動片25と、上記回動片25を回転させる回動片回転手段26とを設け、上記検出された往路ベルト11aの捩れ状態に基づいて上記回動片回転手段26を制御し、上記矯正ローラ22の向きを変更して、往路ベルト11aの捩れを矯正する。
(もっと読む)
プラスチック系廃棄物の処理設備
【課題】プラスチック系廃棄物を破砕、搬送する処理ラインで発火が発生した際に、確実に鎮火させることができるプラスチック系廃棄物の処理設備を提供すること。
【解決手段】プラスチック系廃棄物を破砕し、所定箇所まで搬送するプラスチック系廃棄物の処理設備において、プラスチック系廃棄物を破砕、搬送する処理ラインに発火検知器7a〜7eを設けると共に、発火検知器7a〜7eによって発火が検知されたときに処理ラインに散水する散水装置8a〜8eを設け、さらに、発火検知器7a〜7eによって発火が検知されたときに処理ライン内にあるプラスチック系廃棄物を処理ライン外に排出する排出機構を設けた。
(もっと読む)
ベルトコンベアの異常検出装置
【課題】故障を未然に防止できるベルトコンベアの異常検出装置を提供する。
【解決手段】距離センサ21は、駆動側プーリ12の表面までの距離を測定する。同様に、距離センサ22は、従動側プーリ113の表面までの距離を測定する。コントローラ23は、距離センサ21,22から入力された距離信号に基づいて、距離センサ21,22から各プーリ12,13の表面までの距離を演算する。各プーリ12,13に被搬送物が付着すると各プーリ12,13の見かけ上の直径が大きくなり、コントローラ23で算出される距離が小さくなる。算出された各プーリ12,13の表面までの距離のうち、少なくともいずれか一方の距離が所定値を下回ると、コントローラ23は、警報装置24を作動させるように信号を出力する。
(もっと読む)
コンベヤベルトの縦裂検出装置
【課題】コンベヤベルトが停止しているときでも、ループコイルの断線を検出してコンベヤベルトの縦裂きを検出することのできるコンベヤベルトの縦裂検出装置を提供する。
【解決手段】運転を休止しているコンベヤベルト50上に、保持部材13と、この保持部材13に取付けられた送信ユニット11と受信ユニット12と走行用のローラーと、上記受信ユニット12に取付けられたLED18とを備えた検出ユニット10Zをセットし、上記検出ユニット10Zを上記コンベヤベルト50の長手方向に走行させてループコイル51の上を通過させるとともに、上記送信ユニット11の送信コイルに発振器14から高周波を供給し、上記受信ユニット12の受信コイル12Cにて上記ループコイル51に流れる誘導電流の有無を検出し、これを上記受信コイル12C上に接続されたLED18の点滅にて表示するようにした。
(もっと読む)
141 - 160 / 211
[ Back to top ]