
Fターム[3F027AA02]の内容
Fターム[3F027AA02]に分類される特許
41 - 60 / 211
物品検査装置

【課題】センサ側の調整手段で閾値を変更できず、制御側でワークの品種に対応して適切な閾値を設定して計量データの確度等を保証する。
【解決手段】計量装置は、搬送されるワークWをセンサ6で検出し、センサ6の検出信号に基づくタイミングでワークWの重量を計量する。投光部と受光部からなるセンサは通過したワークの遮光状態に応じたアナログの遮光信号を出力する。ワークWの品種によって波形が異なる遮光信号からワークWを的確に検出するための閾値1又は2を表示部で視認しながら設定する。遮光信号と閾値から得た出力をワークを検出したタイミング信号とし、これによってワークの計量タイミングを適切に管理する。
(もっと読む)
スタッカー

【課題】搬送ベルトが軌道からトリッパーに乗継ぐ乗継ぎ部における搬送ベルトの捻れや反転を検知して、トラブルを未然に防止することができるスタッカーを提供する。
【解決手段】ブームコンベアの後端側に配置され、前端部から後端部に向けて下方に傾斜するスロープ部を有し、地上に敷設された軌道上を走行するトリッパーを備えるスタッカーにおいて、搬送ベルト16から落下する積荷を検知する積荷落下検知装置30がトリッパーの後端部に設置されている。積荷落下検知装置30は、中間部が軸支され鉛直面内で回動自在とされた天秤棒31と、天秤棒31の一端部に設けられ、落下した積荷を捕捉する検知板32と、天秤棒31の他端部に設けられた反力部材33と、天秤棒31が回動して当接することにより作動するリミットスイッチ35とを備えている。
(もっと読む)
パレット搬送方法及びパレット搬送装置
【課題】パレットの搬送速度を搬送する間隔により異ならせて、搬送時間を短縮する。
【解決手段】パレット搬送方法はパレットレール21,41に搭載されたパレット11をパレットレールの長手方向に連続して設けられた複数のパレット搬送手段22,42により搬送する方法である。一のパレット搬送手段22によるパレットの搬送速度を別のパレット搬送手段42によるパレットの搬送速度と異ならせる。一のパレット搬送手段から隣接する別のパレット搬送手段にパレットが移動する際に一のパレット搬送手段と別のパレット搬送手段の双方におけるパレットの搬送速度を同一とする。パレット搬送装置は、パレットを長手方向に沿って移動可能に搭載するパレットレールと、パレットレールの長手方向に連続して設けられパレットの搬送速度を可変可能に構成された複数のパレット搬送手段と、複数のパレット搬送手段を制御するコントローラ61とを備える。
(もっと読む)
重量選別機
【課題】 計量コンベヤに複数の被計量物が同時に搬送される状態を防止することができる重量選別機を提供する。
【解決手段】 重量選別機10は、被計量物Pを搬送する計量コンベヤ1と、計量コンベヤ1上の被計量物Pの重量を計量する計量手段2,3と、計量コンベヤ1に前記被計量物を供給する供給コンベヤ4と、供給コンベヤ4の入口側に設けられ、被計量物Pを検出する物品検出センサ5と、制御器3とを備えている。制御器3は、計量コンベヤ1の長さLに基づいて物品検出センサ5で検出された被計量物Pから定められる被計量物間の間隔Ldに応じた供給コンベヤ4の搬送速度V1を演算し、当該搬送速度V1となるように供給コンベヤ4を制御する。
(もっと読む)
物品搬送装置及び反射形センサー
【課題】物品の位置や姿勢を正確に判定して物品を円滑に分岐搬送路に移載することが可能な物品搬送装置を提供する。
【解決手段】分岐部2を有するローラコンベア装置であり、分岐部2の中心に反射形センサー12の本体部25が設けられている。反射形センサー12には、4個の発光素子と、1個の受光素子及が設けられている。発光素子の発光のタイミングと、受光素子からの信号発信のタイミングを考慮して、今回のON,OFF信号がいずれの発光素子の発光に起因するものであるかを判別し、中心認識出力を出力する。中心認識出力が全てONとなる状態を呈すれば、パレットの中心と、分岐部2の中心が一致している。
(もっと読む)
ワーク搬送装置及びワーク搬送装置の制御方法
【課題】ワークに対して何らかの処理を行う複数の装置へ、効率的にワークを搬送可能なワーク搬送装置を提供する。
【解決手段】ワーク搬送装置1は、設備100が有する第1の装置(3−1、3−2)へワークを搬送する第1の搬送部11と、第2の装置(3−3、3−4)へワークを搬送する第2の搬送部12と、第1の搬送部11に対する命令コードを、設備100が実行する動作の実行順序に従って記憶する第1の記憶部23−1と、第2の搬送部12に対する命令コードを、その動作の実行順序に従って記憶する第2の記憶部23−2とを有する。そしてワーク搬送装置1は、第1の記憶部23−1から設備の動作の実行順序に従って読み出した命令コードに応じた動作を第1の搬送部11に実行させ、第2の記憶部23−2から設備の動作の実行順序に従って読み出した命令コードに応じた動作を第1の搬送部11の動作とは独立して第2の搬送部12に実行させる。
(もっと読む)
コンベヤベルト及びコンベヤベルト磨耗検知システム
【課題】カバーゴムにより形成された搬送面の摩耗量を、作業ロスの発生や
検知コストの上昇を招くことなく確実に検知することができるコンベヤベルト及びコンベヤベルト磨耗検知システムを提供する。
【解決手段】金属部材からなるベルト芯体11を内包し搬送面Cを形成するカバーゴム12と、搬送面Cから所定距離を有してカバーゴム12に埋設されたRFIDタグ13と、ベルト芯体11とRFIDタグ13の間に配置され、リーダからの送信電波を受信したRFIDタグ13が発生させる磁界とベルト芯体11が干渉するのを阻止する遮断シート14とを有する。遮断シート14は、RFIDタグ13が発生させる磁界がベルト芯体を貫通するのを阻止する透磁率の大きな磁性体により形成されている。
(もっと読む)
ピッキング設備
【課題】本発明は、集品容器内に物品の偏りが発生することを防止できるピッキング設備を提供することを目的としたものである。
【解決手段】集品容器15を連続搬送するメインコンベヤ装置16と、集品容器15内の左側の物品14の容積を検出する第1容積センサ52、および右側の容積を検出する第2容積センサ53とを備え、メインコンベヤ装置16に沿って、ゾーン12毎に、ベルトコンべヤ装置33と物品移載装置34から構成される複数の自動移載装置31を備え、第1容積センサ52および第2容積センサ53により検出される集品容器15内の物品14の容積に応じて、自動移載装置31のベルトコンベヤ装置33から物品移載装置34へ物品14を切り出す速度、および物品移載装置34より集品容器15に物品14を投入するタイミングを変更する。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、物品の転倒容易度を正確に得る。
【解決手段】搬送システムは、物品Wを搬送するシステムであって、搬入コンベア3と、速度制御部45と、第2光電センサ13と、判定部49とを備えている。搬入コンベア3は、物品Wを載置して移動する。速度制御部45は、物品Wを載置して移動中の搬入コンベア3の速度を制御する。第2光電センサ13は、減速時の物品Wの挙動を検出する。判定部49は、第2光電センサ13によって検出された物品Wの挙動に基づいて転倒容易度を判定する。
(もっと読む)
クリーンコンベア感知システム
コンベア保守システム及び方法は、設定された閾値を超えてコンベアが汚れる時期を判断することによってコンベアが清掃を必要とする時期を判断する。システムは、コンベア上の汚れの量を表す光学データを収集する検出器と、きれいなコンベアを表す基準データを記憶するメモリと、コンベア上の汚れの量を表す光学データを基準データと比較し、比較に基づいてコンベアが清掃を必要とするか否かを判断するコントローラと、を備える。 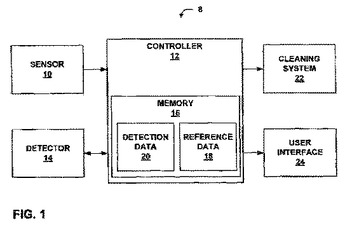 (もっと読む)
(もっと読む)
反転式測定ベルトコンベア
ベルト移動方向に進むコンベアベルト上で物品を測定するためのコンベアおよび方法。ベルトの物品支持ローラが、上流加速ゾーンを画定する静止支持表面によって作動され、物品をコンベアベルトに沿って前方に加速する。コンベアベルトよりも速い速度でベルト移動方向に進む起動ベルトが、下流減速ゾーンにおいてベルト移動方向と反対に回転するようにベルトローラを作動する可動支持表面を提供する。コンベアベルトはまた、規則的に離間された格納可能なフライトを有し、フライトは、加速ゾーンでの静止支持表面との接触によって格納され、減速ゾーンでの可動支持表面との接触によりブロック位置に延出する。減速ゾーンの物品は、フライトの前面に対して測定位置までローラの上で後方に押される。 (もっと読む)
搬送体の姿勢判定装置、および姿勢判定方法
【課題】より簡単な構造で搬送体の姿勢を識別できる搬送体の姿勢判定装置を提供する。
【解決手段】搬送体1に電磁誘導方式のRFIDタグ3を装着する。搬送路に臨んで、タグリーダー4とタイミングセンサー5を配置する。タグリーダー4に、同じ周波数の通信波を送受する2個のアンテナ13・14と、アンテナ制御部を設ける。各アンテナ13・14の通信距離は大小に異ならせてある。タイミングセンサー5が搬送体1を検知したときの検知信号に基づき、通信距離が大きなアンテナから順に各アンテナ13・14を作動させる。各アンテナ13・14におけるRFIDタグ3の反射波の信号強度を信号判定部19で判定する。信号判定部19の判定結果の組み合わせを主制御部20で判定して、搬送体1の搬送姿勢が正常であるか否かを識別する。
(もっと読む)
仕分け装置
【課題】荷物に加わる衝撃を低減した仕分け装置を提供することを目的とする。
【解決手段】仕分け装置100は、主コンベア110と、分岐コンベア120と、主コンベア110の幅方向他方側で、且つ分岐コンベア120に対面する位置に配置され、初期位置P1から押出し位置P3まで移動することによって、主コンベア110上の荷物Wを分岐コンベア120に押し出す押出体の一例であるダイバータ130と、ダイバータ130より主コンベア110の上流側に位置し、主コンベア110の幅方向他方側から主コンベア110上の荷物までの距離を測定する測距部140と、測距部140によって測定された荷物Wの最短の距離に応じて、初期位置P1から中間位置P2までの第1の区間と、中間位置P2から押出し位置P3までの第2の区間とで、ダイバータ130を異なる態様で移動させる押出体制御部150とを備える。
(もっと読む)
物品撮影方法および物品撮影装置
【課題】多列、かつ、ランダムな状態で搬送される多数の容器を、カメラで撮影しカウントすることにより、容器の数を正確に把握する。
【解決手段】撮影コンベヤ上に2台のカメラを設置し、搬送されている容器を撮影する。撮影された画像は制御装置16の画像処理部18に送られて二値化処理されキャップの中心座標を算出されて記憶部20に記憶される。容器がキャップの径の大きさだけ移動する前に、制御装置16の指令部22からの指示により次の画像を撮影する。この画像のキャップも中央座標を算出され、記憶部に記憶されている前回の座標データと比較され、移動位置認識部28で容器の移動位置が認識される。キャップのサイズ分だけ移動する前に次の撮影を行うので、同じ容器の新旧の情報を確実にリンクさせることができ、撮影した画像から容器の数を正確にカウントすることができる。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
紙幣搬送システム
【課題】搬送に要するエネルギーコストを低減すると共に、駆動部品の使用時間の蓄積に伴う早期の劣化による故障の発生頻度を低減する。
【解決手段】幣搬送システム1は、搬送ライン3内の1以上の投入部3aから投入された紙幣2を搬送する。紙幣搬送システム1は、紙幣2を一時停止可能に搬送し、隣接する装置6・6間で搬送方向の上流側と下流側とを相互に連結することにより搬送ライン3を形成する複数の搬送ユニット装置6と、搬送ライン3の下流側の終端位置に配置され、該搬送ライン3により搬送された紙幣2を保管する金庫装置4と、搬送ライン3における紙幣2の位置情報を取得し、該搬送ライン3における紙幣2の保管スペースが埋まるように各搬送ユニット装置6毎に搬送動作と一時停止動作とを行わせる搬送制御装置5とを有する。
(もっと読む)
搬送監視装置および搬送監視方法
【課題】被搬送物と撮像部との間に透明体が介在する監視環境にあっても、被搬送物の搬送状態を高精度に管理可能な装置及び方法を提供する。
【解決手段】第1の搬送監視装置10Aは、透明体1越しに被搬送物2の搬送状態を監視し、被搬送物2及び搬送部3の画像を取得する撮像部11と、撮像部11が取得した画像のベクトルデータを演算する演算部12と、被搬送物2及び搬送部3のモデルデータを記憶する記憶部13,14と、画像中の被搬送物2及び搬送部3の位置を抽出する位置抽出部15,16と、被搬送物2及び搬送部3の相対的位置を算出する相対位置算出部17と、被搬送物2及び搬送部3の正常な相対的位置関係を記憶する記憶部18と、相対位置算出部17が算出した相対位置が正常か否かを判定する判定部19と、判定部19での判定結果に応じて所定の警告を発する警告部20とを具備する。
(もっと読む)
土砂搬送システム
【課題】土砂の搬送効率を向上させることが可能な土砂搬送システムを提供すること。
【解決手段】土砂5を搬送する搬送装置1と、任意の位置に配置され搬送装置1上に土砂5を投入する複数の投入装置3と、各投入装置3の土砂5の投入開始予定時刻Wsを設定する土砂投入管理装置4とを備え、土砂投入管理装置4は、投入予定時間Tsと到達時間Uとに基づき各投入装置3の投入開始予定時刻Wsを算出する算出部45と、当該算出結果に基づき各投入装置3の投入開始予定時刻Wsを設定する投入開始予定時刻処理部46Aとを有し、各投入装置3は、搬送方向上流側から搬送されてくる土砂5の有無を検知する搬送土砂検知センサ33と、当該検知結果に基づき、投入開始予定時刻Wsを含む所定の時間帯に搬送装置1上に土砂5が有るか否かを判定し、土砂5が搬送装置1上に無いと判定したときに土砂5を投入する投入決定処理部35Cとを有すること。
(もっと読む)
熱処理を受ける被搬送製品のためのベルトコンベアおよび方法
熱処理プロセスを通して連続的に製品を搬送するセンサ搭載コンベアベルトを含む環境制御されたコンベアシステム、およびセンサの瞬間位置を特定する方法に関する。温度センサまたは他のセンサはコンベアベルトの幅にわたって、その長さに沿って組み込まれ、殺菌装置トンネルを通るような熱処理プロセスを通る製品と共に進行する。センサの測定結果は、システムをモニタまたは制御するためにベルトから遠隔システムコントローラに無線送信される。環境またはベルトの状態を測定するセンサからのデータを用いてセンサの瞬間位置を特定し、センサのデータをセンサ位置と連動させる。 (もっと読む)
物品供給装置
【課題】複数個単位で切り出された集合品を、各物品が略隙間無く寄せられた状態で供給する。
【解決手段】供給コンベヤ22の上流側に接続される切り出しコンベヤ20は、物品貯留時には各コンベヤ20a,20b,20cに1個ずつ物品10を載置して停止し、物品切り出し時には切り出し数に対応する数のコンベヤ20a,20b,20cの走行を一斉に開始して供給コンベヤ22に切り出し数分の物品10を送り出す。供給コンベヤ22の搬送途中に、集合品を一対の支持片40,42で前後から挟んで各物品10を略隙間無く寄せた状態とする集合手段44が配設される。集合品の集合動作後に、前方に位置する一方の支持片40は搬送路外へ退避し、後方に位置する他方の支持片42は前進移動を停止または減速して次の集合品の集合動作を待機する。
(もっと読む)
41 - 60 / 211
[ Back to top ]