
Fターム[3F072GA05]の内容
Fターム[3F072GA05]の下位に属するFターム
計数、計量(大きさ、長さ、重さ) (34)
接触式検出(リミットスイッチ等) (6)
非接触式検出(フォトセンサー等) (110)
Fターム[3F072GA05]に分類される特許
21 - 40 / 52
システム、把持ヘッド、および、製品を移すための方法
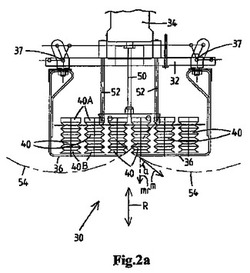
本発明は、製品を移すためのシステムに関し、当該システムは、製品(5)を搬送方向に搬送するためのコンベア(3)を有し、かつ、該製品を該コンベアから他の位置へと移すための可動の把持ヘッド(9)を持った把持装置(7)を有し、前記把持ヘッドは、ベース(32)を有し、少なくとも1つの把持フィンガー(36)を有し、該把持フィンガーは、製品の第1の側を保持するための把持ポジションと、前記少なくとも1つの把持フィンガーを製品が通過方向に通過できる開ポジションとの間での動作のために、該ベースに可動に取り付けられており、前記少なくとも1つの把持フィンガーは、把持ポジションから開ポジションへと移動する時に、該把持フィンガーが最初に前記通過方向に該製品から遠ざかる方へ移動するように構成されている。本願発明は、さらに、把持ヘッドに関し、かつ、その把持ヘッドを用いて製品を他の位置に移す方法に関する。 (もっと読む)
ワーク選別装置

【課題】軸方向に径差を有する円すいまたは円筒状ワークをその向きによって確実に選別し、機械への逆向き投入を防止する。
【解決手段】軸方向に径差を有する円すい状または円筒状のワークを大径端側を上にした向きに揃えて搬送するワーク選別装置10であって、ワークを縦にした状態で収容できるワークポケット14を外周に複数配置した回転可能な円板状のワークキャリヤ12と、ワークキャリヤ12の下方に位置し、周方向の一部に切除部18を有するキャリヤベース16と、切除部18に対応する周方向領域で、ワークキャリヤ12によって搬送されるワークの移動軌跡に沿った通路とを具備し、通路の幅はワークの小端側径より大きく、ワークの大端側径より小さい。
(もっと読む)
格納式搬送ホイールを備えるコンテナ製造装置
コンテナ送風器ユニットが配置される第1のエンクロージャーと、これと隣接してコンテナを充填する充填ユニットが配置される無菌の第2のエンクロージャーとで構成され、共通開口を通してコンテナを搬送する搬送装置と、充填ユニットを浄化する際に第2のエンクロージャーを隔離し、開口を遮断する遮断手段とで構成されるコンテナ製造装置である。 (もっと読む)
樹脂成型品の外観検査装置及びその外観検査方法
【課題】被検査物の外観検査にあまり複雑な機構を用いず、設置スペースをコンパクトに抑える。
【解決手段】外観検査装置は、被検査物となるキャップCを透明板12上に行列状にして載置し、各横列分をプッシャロッド14cで押しながら透明板12の上面に沿って搬送する。この間に透明板12の下方から内面検査カメラ16でキャップCの内面が撮像される。次にキャップCは第1ベルトコンベア18、第2ベルトコンベア20を通じて移送部30のターレットテーブル32まで搬送され、1個ずつポケット34内に受け入れられる。移送部30は、キャップCの内面を保持した状態でターレットテーブル32の回転方向に移送し、検査位置でキャップCを突き上げた状態で回転させる。このとき側方からキャップCを外周面検査カメラ42で撮像する。また、キャップCの上方からは天面検査カメラ40で撮像する。
(もっと読む)
ワーク移送装置とそれを用いたワーク移送方法
【課題】移送中に基板(ワーク)同士を所望の間隔に拡げて、碁盤目状に正確かつ容易に整列させることが可能なワーク移送装置とそれを用いたワーク移送方法を提供する。
【解決手段】本実施例のワーク移送装置は、複数のセラミック基板20を吸着し、列単位で保持するワーク保持部1aと、このワーク保持部1aが端部に取り付けられる移動部2と、この移動部2に垂設される可動コラム3と、この可動コラム3を昇降自在に支持するZ軸ガイド部4と、このZ軸ガイド部4をガイドレール5に沿って進退可能に支持するX軸ガイド部6と、X軸ガイド部6及びZ軸ガイド部4を駆動するネジ送り機構(図示せず)とを備え、ワーク保持部1aは上下方向に15本の吸気孔7がそれぞれ穿設された吸着部8a,8bからなり、吸着部8a,8bは側面に取り付けられた吸着部ガイド部13a,13bによってX軸方向に対して進退自在に支持されている。
(もっと読む)
ホッパー付きネジ類供給装置
【課題】無動力でホッパー体からネジを供給することができ、ネジ供給装置自体はコンパクトでありながら、ホッパー体自体が着脱可能であるので、作業者が一人で作業を行うセル方式のみならず、全自動工程に組込まれてもホッパー体を設置することで頻繁にネジの補充をする必要が無いコンパクト性を保持したホッパー付きネジ類供給装置を提供する。
【解決手段】ネジ供給装置において、ホッパー体の下部に垂下形成した挿入筒部3を収容部内に着脱自在に挿入する。しかも、ホッパー体2と挿入筒部3を供給装置本体による振動に対して影響を受けない所定間隙を設けて設置し、挿入筒部3の下端に設けた供給口6より収容部内にネジを無動力で収容部内へ順次供給するようにしたホッパー付きネジ類供給装置である。
(もっと読む)
箱の解体装置付き棒状物品の供給機
【課題】小形化且つ設置スペースの削減を図ることができる箱の解体装置付き棒状物品の供給機を提供する。
【解決手段】箱の解体装置付き棒状物品の供給機は、棒状物品としてのフィルタロッドを収納した箱(B)をコンベアセクション(10)からロッドホッパ(30)近傍のベルトコンベアまで搬送し、このベルトコンベア上に箱(B)内のフィルタロッドを載置して箱(B)を空箱(B’)とする搬送供給装置(2)と、搬送供給装置(2)から受け取った空箱(B’)を解体装置(6)まで移送する移送装置(4)とを備え、解体装置(6)はその一部が搬送供給装置(2)のコンベアセクション(10)の下方に重なり合うようにして配置されている。
(もっと読む)
搬送装置
【課題】部品を予め整列させなくても、搬送途中にサイクルタイムを悪化させることなく部品の位置または姿勢を整えることが可能な搬送装置を提供する。
【解決手段】搬送装置1は、部品を保持した状態で受渡し領域3まで移動する受入トレイ11と、受渡し領域3まで移動して受入トレイ11から部品を受け取り、他の領域まで部品を保持した状態で搬送する部品保持モジュール40と、受入トレイ11が部品と共に受渡し領域3に到着してから部品保持モジュール40が受渡し領域3に到着するまでの間に、受渡し領域3において受入トレイ11に保持された部品の位置または姿勢を整えるトレイ移動手段12および待機部品撮像手段13と、を備える。
(もっと読む)
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
搬送装置
【課題】搬送装置において、被搬送物と被搬送物を把持するグリップ部との互いの位置を調整可能とする。
【解決手段】搬送装置は、軌道(100)に沿って走行する走行部(210)と、走行部の下側に取り付けられており、鉛直方向に交わる表面を有する基準板(251)と、基準板に対向配置されると共に、表面に沿って回転可能なように基準板の下側に取り付けられた回転板(252)と、回転板に設けられており、被搬送物を把持するグリップ部と、回転板を前記基準板に対して回転させることで、グリップ部及び被搬送物間の位置調整を行う調整手段(255、257、258)とを備える。
(もっと読む)
保持装置およびそれを備える搬送装置
【課題】 吸着すべき複数種類の披保持体の大きさに合わせて予め配置して形成しておく必要がなく、かつ複数種類の披保持体の大きさに合わせて迅速に披保持体を保持することができる保持装置およびそれを備える搬送装置を提供する。
【解決手段】 予め定める仮想一平面に臨んで開口21Aする孔がそれぞれ形成される複数の当接部21と、各当接部21に切替えユニット14を介して、圧縮空気供給ユニット15および吸引力供給ユニット16から前記孔に圧縮気体および吸引力を選択的に供給する。圧縮空気供給ユニット15から供給される圧縮空気によって、各当接部21が枠体26の中央から周縁に向かう方向に移動し、各当接部21が披保持体の大きさに対応する位置で、前記孔に吸引力を吸引力供給ユニット16からの吸引力を供給することによって、披保持体を吸着して保持する。
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
青果物選別装置
【課題】未選別のさくらんぼなど青果物を、人手に頼らずに、自動的、正確で、傷をつけることなく搬送部に供給できる、作業性を向上させた青果物選別装置を提供する。
【解決手段】未選別物を貯留する供給部3と、供給部3の未選別物を計測する測定部4と、測定部4の計測情報に基づいて未選別物を選別する選別部と、供給部3の未選別物を供給部3近傍から選別部まで搬送する搬送部2とを備え、供給部3の未選別物を吸着する供給部3の設定位置aと、吸着した未選別物を放出する搬送部2の設定位置bとの間を往復動する、吸着部を有する移送装置30を備える。吸着部は、供給部3の設定位置aと、搬送部2の設定位置bとで上下昇降かつ、上昇位置間で往復動し、未選別物を弾性的に支持するとともに、弾性変形可能であり、未選別物の載置部8aが、搬送部2の設定位置bに位置したことを検出する検出器を、搬送部2近傍に備える。
(もっと読む)
容器検査装置
【課題】容器に対して行う複数の検査の精度をそれぞれ向上させることが可能な容器検査装置を提供する。
【解決手段】所定の搬送経路に沿って搬送されている容器に対して複数の検査を行う容器検査装置1において、スターホイール式搬送装置20、30と、スターホイール式搬送装置30の下流に配置され、スターホイール式搬送装置30から排出された容器を排出された順に取り込み、その取り込んだ容器を一対の搬送ベルト41、41にて挟み込んだ状態で一方向に搬送するストレート式搬送装置40と、を備え、複数の検査のうちの一部の検査がスターホイール式搬送装置20にて搬送されている容器に対して行われ、複数の検査のうちの残りの検査がストレート式搬送装置40にて搬送されている容器に対して行われるように複数の検査装置80〜85が設けられる。
(もっと読む)
移載装置
【課題】 導電部と非導電部とを有し、導電部が所定の位置に配置される管状体を、所定の搬送位置にずれることなく搬送することができる移載装置を提供することを目的とする。
【解決手段】 移載装置11は、CCFL37をCCFL供給部14より供給し、CCFL37をCCFL供給部14から搬送位置Dまで搬送する。移載装置11は、把持手段である把持部30,31によって、CCFL37を直径方向に挟んで把持し、検査手段である把持部30,31によって、CCFL37を把持した状態で、CCFL37を介して電気的に導通するか否かを検査する。そして、把持位置を、把持位置調整手段によって調整し、移載部12によって、CCFL供給部14から搬送位置Dまで管状体を搬送する。移載装置11は、制御部15によって、検査手段の検査結果に基づいて把持位置調整手段を制御し、把持位置が導電部を把持する位置となるように調整される。
(もっと読む)
搬送装置
【課題】被搬送物の製造装置の稼動率低下を防止でき、かつ簡便な構造の搬送装置を提供することを目的とする。
【解決手段】複数の被搬送物3を取り出し位置まで順次に搬送するコンベア1と、コンベア1にて移動している複数の被搬送物3を各別にコンベア1から離して支持すると共に、支持した被搬送物3をコンベア1に戻す複数のリフター10と、コンベア1にて移動している被搬送物3を検出する複数のセンサ15とを備え、取り出し位置におけるリフター10aは、対応するセンサ15aが被搬送物3を検出した場合には被搬送物3を支持し、取り出し位置以外におけるリフター10b〜10fは、対応するセンサ15b〜15fが被搬送物3を検出しかつ搬送方向直前のリフター10が支持状態である場合には検出した被移送物3を支持する一方、搬送方向直前のリフター10が支持状態を解除した場合には被搬送物3をコンベア1に戻す。
(もっと読む)
カップ供給装置
【課題】多数のカップを積み重ねてストックでき、カップを高速で供給できるようにし、食品製造ラインの製造速度に適合できるようにする。
【解決手段】第1のカップストッカー4に縦横に配列されている最前列1列のカップユニット3を保持部6により保持し、昇降装置7による保持部6の移動によって、保持部6により保持しているカップユニット3を第2のカップストッカー5に積み重ね状態として供給するために、カップユニット3を一列ずつ保持・解放する保持部6を昇降装置7に進退自在に設け、昇降装置7による保持部6の移動および保持部6の保持・解放動作を制御装置10により制御し、1列のカップユニット3を第1のカップストッカー4から第2のカップストッカー5に供給する。
(もっと読む)
農産物箱詰め用の供給装置
【課題】搬送コンベアから搬送される所定個数の農産物を傷めることなく確実に収容できる箱詰め用コンベアを提供する。
【解決手段】搬送コンベア5から間欠的に進入する所定個数の農産物を箱詰め待機位置にて箱詰め装置に供給する箱詰め用コンベア6を備えた農産物箱詰用の供給装置6等であって、前記箱詰め用コンベア6は、水平位置と、搬送方向上流側を傾斜上方位置として傾斜する傾斜位置との間を移動可能とし、且つ該傾斜位置において前記搬送コンベアより進入した所定個数の農産物の搬送動作を停止させて収容可能する
(もっと読む)
平板状物品の搬送装置
【課題】
把持手段の平板状物品持ち替え時のロス時間発生をなくしてマシーンタクト低下を防止するとともに、平板状物品持ち替えによる位置ずれの発生を防止する。
【解決手段】
平板状物品のガイドレールと把持する複数の搬送ユニットとを備え、搬送ユニットが異なる平板状物品を把持して前進する搬送装置に次の手段を採用する。
第1に、搬送ユニットは、物品を把持する把持手段と、把持手段をガイドレールに沿って前進及び後退させる往復移動機構と、把持手段を物品の把持位置から待避させる退避機構とを有するものとする。
第2に、先行している一の搬送ユニットの把持手段が前進端まで移動すると、物品の把持を解除し、把持手段を退避機構により把持位置から退避するとともに、後続する把持した他の搬送ユニットの把持手段を追い越して後退し、新たな物品を把持して、先行している把持手段の末尾に後続するものとする。
(もっと読む)
21 - 40 / 52
[ Back to top ]