
Fターム[3F204CA03]の内容
クレーンの細部(制御、安全) (2,955) | 目的 (511) | 振れ止め (60)
Fターム[3F204CA03]に分類される特許
1 - 20 / 60
クレーン振れセンサ及びクレーン
【課題】簡素な構成で正確に振れを検出することができるクレーン振れセンサを提供する。
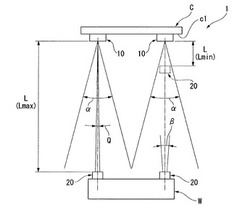
【解決手段】クレーン本体Cに設けられ、クレーン本体Cの下方に向けられた撮像部10と、クレーン本体Cに吊り下げられて撮像部10と対向する吊り具Cに設けられ、アレイ状に配列された複数のLEDチップにより発光面が形成され、上方へ向けて照射光を発するLEDアレイ素子を有するターゲット部20とを備え、ターゲット部20の発光面の重心から縁までの最短距離をd、撮像部10とターゲット部20との間の最大ストロークをLMAX、撮像部10の撮像素子の瞬時視野角をQとした場合に、以下の関係を満たすことを特徴とする。
Q×LMAX<d
(もっと読む)
クレーンの吊り荷の振れ角度検出センサ

【課題】 巻き上げリミット用の重錘を利用した簡単な機構で高精度かつリアルタイムに吊り荷の振れ角を検出することができるクレーンの吊り荷の振れ角度検出センサを提供すること。
【解決手段】過巻き検出リミットスイッチ用の重錘11に設けたMEMS慣性センサ12をワイヤロープRの振れに追従させ、2本の非自転性ワイヤ13で鉛直軸4周りの回転を拘束しておき、クレーン起伏中心軸と平行な起伏軸2周りとこれと直交する水平な回転軸3周りの2軸の角度または角速度をMEMS慣性センサ12により、制御器での変換の必要をなくして、リアルタイムで精度良く検出するとともに、重錘11を利用することで装置をコンパクトにする。
(もっと読む)
クレーンの吊り荷の振れ角度検出装置
【課題】制御器での角度変換の必要がなく、検出ロッドの長さを一定以上に長くするなどの組み込みの制約もなく、コンパクトかつ簡単な機構で高精度かつリアルタイムに吊り荷の振れ角を検出することができるクレーンの吊り荷の振れ角度検出装置を提供する。
【解決手段】クレーン起伏中心軸と平行な起伏軸13周りとこれと直交する水平な旋回軸14周りの2軸の角度または角速度を検出するMEMS慣性センサが設けられた検出器本体17をクレーン先端部1から吊り下げ部材16を介して吊り下げるとともに、吊り荷を巻き上げ下げするワイヤロープ2に相対移動可能かつワイヤロープの振れ角に追従可能に検出器本体17を設ける。これにより、吊り下げ部材16で吊り下げた検出器本体17をワイヤロープ2の振れに追従させ、検出器本体17に設けたMEMS慣性センサによりリアルタイムで精度良く振れ角度を検出することで、装置をコンパクトにする。
(もっと読む)
クレーン
【課題】レール上を走行する荷役装置(トロリ)を有するクレーンにおいて、レール上でのトロリの蛇行を抑制し、トロリの車輪のつばとレールの接触(つばぜり)による摩耗、吊り荷の揺れ、及び騒音の発生を抑制したクレーンを提供する。
【解決手段】レール3と、レール3上を走行する荷役装置2を有するクレーンにおいて、荷役装置2が、レール3に対する荷役装置2の傾きを検出する姿勢検出センサ20と、荷役装置2の有する各車輪10の回転数を制御する制御装置を有しており、姿勢検出センサ20が、レール3に対する荷役装置2の傾きを検知し、荷役装置2の傾きに基づき各車輪10の回転数を制御する。
(もっと読む)
クレーンの振れ止め制御方法及び振れ止め制御装置
【課題】吊り荷を支持するロープ長が変化する場合でも、比較的簡単な演算により所定の速度パターンを生成して吊り荷の振れ止めを行う。トロリーの目標位置と移動量との位置偏差が減速開始距離に等しくなった時点からトロリーの減速を開始し、高精度な位置決めを可能にする。
【解決手段】トロリーが移動する際の吊り荷の振れ角に関する運動方程式に基づいてトロリーの加減速時の速度パターンを求め、この速度パターンに従ってトロリーを駆動することにより吊り荷の振れ止めを行う制御方法に関する。前記運動方程式をトロリー加速度について解くことにより数式2に示す加減速度を求め、この加減速度に応じた速度パターンに従ってトロリーを駆動し、トロリーの加減速が終了した時点の吊り荷の振れ角が零となるように制御する。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
ロープトロリ式アンローダのバケット振れ止め装置
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、張力検出手段からの第1巻上ロープ19及び第2巻上ロープの張力検出値とトロリの横行速度検出手段からのトロリ横行速度とグラブバケットの吊り長さ検出手段からの吊り長さとを入力し、トロリの横行起動時には横行方向前側の巻上ロープの張力が横行方向後側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御し、トロリの横行停止時には横行方向後側の巻上ロープの張力が横行方向前側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御してグラブバケットをトロリの直下に位置させる制御器を備える。
(もっと読む)
クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置
【課題】振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出し、各種パラメータ調整が容易で高精度に振れ止め制御を行う。
【解決手段】クレーン制御装置は、トロリーを駆動する走行モータの駆動力を制御装置に入力し、制御装置が所定の状態方程式から求められたオブザーバに基づいて、ロープの振れ速度推定値、振れ位置推定値及び外乱推定値を求める。制御装置が走行モータの速度操作指令信号を出力し、レギュレータにより速度操作指令信号からトロリーの速度、振れ速度推定値及び振れ位置推定値をそれぞれ調整した値を減算することによりトロリーの目標駆動力を求め、これを走行モータのトルク操作指令信号に変換すると共に、この信号から、外乱推定値から求められたトルク成分をキャンセルして走行モータのトルク指令信号を算出しこれによって走行モータをトルク制御する。
(もっと読む)
固定式ケーブルクレーンの運転方法
【課題】2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供すること。
【解決手段】1号固定式ケーブルクレーン1および2号固定式ケーブルクレーン3を並列に設置する。そして、ウェブ59に吊り穴61を有するI型鋼57を、1号固定式ケーブルクレーン1の1号吊具17と2号固定式ケーブルクレーン3の2号吊具19とに架け渡して吊り下げ、任意の吊り穴61に第3の吊具65を設置して吊荷67を吊る。さらに、1号位置検出器35および2号位置検出器41により、1号吊具17および2号吊具19の位置信号を検出し、これらの位置信号と1号固定式ケーブルクレーン1の動作信号とに基づいて、1号吊具17と2号吊具19とが同期して移動するように2号固定式ケーブルクレーン3に動作信号を出力する。
(もっと読む)
橋形クレーン
【課題】橋形クレーンのブームを吊り下げ支持するテンションバーが走行方向へ振動することを抑制する手段を提供することにある。
【解決手段】本発明に係る橋形クレーン1は、支持体21と、この支持体21から張り出して設けられた長尺なブーム22と、このブーム22に対して傾斜するようにして、ブーム22の先端部と支持体21とを連結して設けられ、ブーム22を吊り下げ支持するテンションバー23と、このテンションバー23の軸方向引っ張り側への振動を減衰する減衰手段3と、を備えるものである。
(もっと読む)
クレーンの振れ止め制御装置
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
低揺動洋上荷役システム又はこれを備えた洋上浮遊体
【課題】洋上において荷役機構の上下動に起因した吊荷等の負荷の揺動を抑制しその位置を一定に保つ揺動制御を行うにあたり、より小型で高効率の低揺動洋上荷役システムを新たに提供する。
【解決手段】揺動制御を行うための構成を備えたものにおいて、発電機5からインバータ7に向かう給電ライン11の一部に直流電力を備蓄する蓄電部13を接続して、揺動制御における回生時に電動モータ9から回生エネルギを蓄え、蓄えたエネルを力行時に電動モータ9に供給し得るようにした。
(もっと読む)
クレーンの制御方法
【課題】吊荷のロープの長さを変動する場合における吊荷の残留振動をより効果的に抑制することのできるクレーンの制御方法を提供する。
【解決手段】
加速区間、等角速度区間、減速区間の順で旋回させる運搬過程を有し、当該運搬過程において、前記運搬開始位置から前記目標位置までに要する運搬時間の1/2の時刻で対称(折り返した場合に等しくなる対称関係)となるように座標変換を行うと共に、前記ワイヤの長さの変動および前記吊荷の昇降速度の変化に応じて算出される旋回加速、減速パターンに基づいて、旋回速度の加減速制御を行う。
(もっと読む)
油圧タグライン装置
【課題】吊下体の保持時に、油圧ポンプに常時掛かっている負担を軽減させることにより動力損失を少なくする。
【解決手段】タグラインドラムを駆動する油圧モータ2と、油圧モータ2に圧油を供給する油圧ポンプ1と、蓄積した圧油を油圧モータ2に供給してするアキュムレータ3と、アンロードリリーフ弁4とが設けられている油圧タグライン装置であり、アンロードリリーフ弁4のプレッシャポートPには油圧ポンプ1が接続され、アンロードリリーフ弁4のタンクポートRにはタンク9が接続され、アンロードリリーフ弁4のアクチュエータポートAには油圧モータ2の一方のポートが接続され、油圧モータ2の一方のポートとアンロードリリーフ弁4のアクチュエータポートAとの間にアキュムレータ3が接続され、油圧モータ2の他方のポートはアンロードリリーフ弁4のタンクポートRと前記タンク9との間に接続されている。
(もっと読む)
振れ検出装置、振れ検出方法、及びクレーン
【課題】簡易な構成で吊荷の振れ変位量を正確に検出することができる振れ検出装置、振れ検出方法、及びクレーンを得ることを目的とする。
【解決手段】トロリに設けられたセンサによりコンテナを把持するスプレッダに設けられたレーザ光源の位置を検知することで吊荷の振れ変位量が検出される。そして、オフセット誤差導出部64が、吊荷の振れ角度、トロリの速度の微分値、及び振れ変位量の2階微分値に基づいてオフセット誤差を導出し、減算部66が、オフセット誤差を検出した振れ変位量から減算することで、オフセット誤差を検出した振れ変位量から除去する。
(もっと読む)
クレーンの制御方法
【課題】吊荷の残留振動をより効果的に抑制することのできるクレーンの制御方法を提供する。
【解決手段】ブームの旋回半径を一定として、加速区間、等角速度区間、減速区間の順で旋回させる運搬過程を有し、当該運搬過程において、運搬開始位置から目標位置までに要する運搬時間の1/2の時刻で線対称(折り返した場合に等しくなる対称関係)となるように座標変換を行った旋回加速、減速パターンに基づいて、旋回速度の加減速制御を行う。
(もっと読む)
岸壁クレーン
【課題】
岸壁クレーンに発生する水平振動(横行方向振動及び走行方向振動)とねじれ振動(縦ねじれ振動及び横ねじれ振動)を抑制する制振構造を有した岸壁クレーンを提供する。
【解決手段】
脚構造物2の下方に走行装置30を有し、上方にガーダ3及びブーム4を有した岸壁クレーン1において、前記ガーダ3及び前記ブーム4にそれぞれ少なくとも1つの制振装置5を設置し、前記制振装置5が、前記ガーダ3又は前記ブーム4に対して減衰機構7を介して揺動自在に設置した制振マスmを有するように構成した。
(もっと読む)
自走式クレーンの走行制御装置
【課題】フックに荷が吊された状態での自走式クレーンの走行を低速走行にすることの確実性を向上させることができる自走式クレーンの走行制御装置を提供する。
【解決手段】走行体の走行速度の上限を制御する上限速度制御手段34dと、操作されることにより上限速度制御手段34dに対し走行モードの切換を指令する走行モード指令手段(走行モードスイッチ31)を備え、さらに、フックに荷が吊されていない空荷状態を検知する空荷検知手段を備える。上限速度制御手段34dは空荷検知手段により空荷状態が検知された状態であるときに、走行モードを高速モードとする。
(もっと読む)
クレーンの振れ止め制御方法
【課題】 設定されたパラメータの影響を受けずに高精度の制御が可能なクレーンの振れ止め制御方法を実現する。
【解決手段】 クレーンのトロリーによる吊り荷搬送の加速工程では、あらかじめ設定された吊り荷の固有周期に基づいて同調制御を行うとともに、吊り荷の振れ周期を計測し、等速度搬送工程では、吊り荷の振れ振幅を計測し、振れ振幅に基づいて搬送方向と同じ方向に作用する正方向制御加速度と搬送方向と逆方向に作用する逆方向制御加速度とを設定し、振れ振幅が最大またはゼロとなるときから、正方向制御加速度及び逆方向制御加速度を、振れ周期に基づいてそれぞれ設定される所定の時間で、トロリーにそれぞれ作用させる振れ制御を行い、減速工程では振れ周期に基づいて最短時間制御を行う。
(もっと読む)
旋回クレーンの振れ止め制御方法及び制御装置
【課題】旋回角度θに起因する特異点を持たずに、旋回クレーンの連続的な振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供する。
【解決手段】吊り荷運搬用のブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、前記制御入力を、ブームの目標旋回角速度と、ブームの目標旋回角度と、ブームの水平旋回半径と、旋回クレーンからフィードバックされたブームの実際の旋回角度,吊り荷の水平面内のx方向位置及びy方向位置,吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算する。
(もっと読む)
1 - 20 / 60
[ Back to top ]