
Fターム[3J070DA01]の内容
Fターム[3J070DA01]の下位に属するFターム
Fターム[3J070DA01]に分類される特許
101 - 120 / 300
入力装置
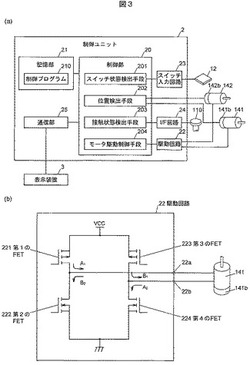
【課題】ユーザに適切な操作感を与えながら消費電力を削減することができる入力装置を提供する。
【解決手段】入力装置1は、ユーザによる操作によって移動可能な操作ノブ11と、操作ノブ11を移動可能に支持する本体部10と、本体部10に対する操作ノブ11の位置を検出するエンコーダ141b,142bと、供給される電力に応じて操作ノブ11に反力を付与することが可能な支持駆動機構101と、操作ノブ11へのユーザの手部の接触及び離間を検知する接触センサ110と、操作ノブ11の位置に基づいて支持駆動機構101を制御して反力を発生させ、接触センサ110がユーザの手部の離間を検知したとき支持駆動機構101の電力の供給を遮断し、接触センサ110がユーザの手部の接触を検知したとき支持駆動機構101への電力の供給を再開する制御部20とを備える。
(もっと読む)
自動車の運転操車時に、ブレーキペタルとアクセルペタルの誤踏込み防止用ボードをブレーキペタルに装着固定した自動車。

【課題】 自動車の運転操車中にブレーキペタルとアクセルペタルの踏み違いによる事故を防止するよい方法は無いものかと思案したが、先ず運転者の技術の向上、心の持ち方が第一であるが、物理的、機械的に事故を防止する方法は無いものかと、右足でアクセルペタルを踏み、左足でブレーキペタルを踏み込み操車する事が最適であり、その右足のアクセルペタルと左足のブレーキペタルの踏み違いが無い様に、ブレーキペタルのアームと踏み板を利用して踏み違い防止用ボードを装着固定して課題を解決した。
【解決手段】 自動車の運転操車中にブレーキペタルとアクセルペタルの踏み違いによる事故を防止する為、右足でアクセルペタル左足でブレーキペタルを踏み込み運転操車する事を自動車メーカー、自動車運転教習場などで徹底した教育が必要である事は元よりであるが、本案の踏み違い防止用ボードをメーカー修理業者などが装着設置する事で、解決する為の手段とした。
(もっと読む)
誤操作検出装置及び誤操作検出方法
【課題】ドライバの誤操作による車両の暴走を防止する。
【解決手段】挙動解析部112で解析したドライバの仕草(挙動)に基づいて、意図推定部113がドライバの意図(ドライバが車両を前進させようとしているのか、あるいは、後進させようとしているのか)を推定する。そして、誤操作判定部140において、推定されたドライバの意図に基づいて、そのドライバの意図を実現するようなギアのレンジ位置やアクセルペダルの踏み込み量が実行されているかを判定し、ドライバの意図とは異なるギアのレンジ位置やアクセルペダルの踏み込み量が検出された場合には、誤操作が生じていると判断して、警報報知や車両の駆動制御を行う。
(もっと読む)
車両用ペダル装置
【課題】簡単な構成でペダル操作性を効果的に向上させることができる車両用ペダル装置を提供する。
【解決手段】車室の底部を形成するフロアパネル9の上方に運転席シートが配設されるとともに、該運転席シートの前方にアクセルペダル4等からなる操作ペダルが配設された車両において、上記操作ペダルには運転者によって踏込操作されるペダル本体18が設けられ、該ペダル本体18には、側面視で運転席側に膨出した所定の曲率半径を有する湾曲面からなる凸面状部23が設けられるとともに、その上方には、該凸面状部23に比べて曲率半径が小さく設定された平坦面状部24が連設された。
(もっと読む)
車両制御システム
ペダルの踏み位置の差異による感度差が自動修正される車輌
【課題】自動車等の車輌に於いてペダルが運転者により足踏み操作されることにより車輌の運転指標が調節される場合に、感覚的には同じペダル踏込み度に対してペダルの足踏み位置の差によってペダルの動きに差が生ずることにより運転指標の調節に差が生じることを自動的に修正することにより車輌の運転特性の安定性を高める。
【解決手段】運転者により足踏み操作されることにより運転指標を調節するペダルを備えた車輌にして、ペダルの踏込み度に対応する運転指標をペダルに対する運転者の足の当り位置の差異に応じて修正する。
(もっと読む)
車両用ペダルアーム
【課題】実用的な支持剛性を確保しつつ軽量化を達成できる車両用ペダルアームを提供する。
【解決手段】先端に踏面(2)またはその取付け部(12)を有し、基端側に、車体に対して回動可能に支持される被支持部(3)と、車両機器に連結される出力部(4)とを有する車両用ペダルアーム(1)であって、前記被支持部と前記出力部との間に切欠部(11)または透孔部を有する金属厚板製のアーム本体(10)と、前記切欠部または透孔部を覆って前記アーム本体に溶接接合された金属薄板製の補強部材(20)とを備えたことを特徴とする。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
センサ装置と検出対象物との連結構造
【課題】少なくとも一軸方向に揺動可能な検出対象物Bと、検出対象物Bの動きを検出するセンサ装置Aとの連結構造において、検出対象物Bの動きをセンサ装置Aに正確に伝えることができる連結構造を提供する。
【解決手段】スライダブロック5,6に挿通された移動体100の上端部に、円筒状の凹部103aを有する円筒状の支持部103を設け、検出対象物Bの下端部に、凹部103aに嵌合される球状の球状部104aを設けた。移動体100は、球状部104aを回動支点として検出対象物Bに対して回動できるので、検出対象物BをガイドB5に沿って揺動させると、移動体100はセンサ装置Aに対して垂直な状態のまま平行移動する。これにより、検出対象物Bを直接スライダブロック5,6に挿通する場合に比べてスライダブロック5,6が歪むおそれが小さくなり、検出対象物Bの動きをセンサ装置Aに正確に伝えることができる
(もっと読む)
車両等操縦用ジョイスティック装置
【課題】応答性に優れ、操作反力及び操作量を適正な範囲に調整でき、破損等の少ないジョイスティックを提供することを課題とする。
【解決手段】本発明の第1の発明に係るジョイスティック装置は、把持部120と、把持部と連結して把持部下部に配置されたアーム板130と、ベース110と、アーム板130をベース110に対して揺動自在に連結する締結部材140と、弾性部材を有し、前記アーム板と前記ベースを介して該弾性部材に予圧する押圧部160,161と、を備え、押圧部160,161は、感圧素子150を有するもの160と、感圧素子150を有さないもの161とが、一対となって、同一直線方向に配置されていることを特徴とするものである。
(もっと読む)
自動車用のペダル装置
【課題】簡単で頑強な信頼できる解放装置を有するペダルアーム装置を提供する。
【解決手段】第1の回動ジョイント接続部12を介して車両構造体に接続されるとともに、第2の回動ジョイント接続部16を介して力伝達要素15に接続されるペダルアーム11を備えるとともに、火薬によって駆動される解放装置19を更に備え、解放装置19が、対応する作動信号に応じて駆動されると、第2の回動ジョイント接続部16を解放するために解放動作を行なうようになっている、自動車用のペダル装置。解放装置19の解放動作は、ペダルアーム11にほぼ沿った並進動作に基づいている。
(もっと読む)
車両用操作ペダル
【課題】ペダルアームのシート固定部にペダルシートを溶接する際の溶接装置の取り回しの自由度が高く、ペダルシートの踏み込み剛性を容易に確保できるようにする。
【解決手段】ペダルシート18にはペダルアーム14の下端側の先端開口部(シート固定部)42が貫通する取付穴40が設けられ、裏面17側からその取付穴40内にペダルアーム14の先端開口部42が嵌め入れられた状態で、踏面16側からプラズマ溶接が施されて取付穴40の周縁部がペダルアーム14の先端開口部42に一体的に固定される。このため、溶接を行う際に溶接トーチ等の溶接装置とペダルアーム14とが干渉する恐れがなく、溶接装置の取り回しの自由度が高くなり、溶接部位を適当に設定することにより所定の踏み込み剛性を容易に確保することができる。
(もっと読む)
操作レバー装置
【課題】簡単な構成で且つコスト安を図りつつ、操作レバーの振動を防止できるようにする。
【解決手段】操作レバー装置1は、操作レバー6を支持ベース2に任意の方向へ傾倒操作可能に設けている。操作レバー6のレバー本体7の基端部側外周に可動フランジ10が該レバー本体7の軸方向へ移動可能に配置された形態で支持ベース2フランジ配置面部2cに載置されている。この可動フランジ10は外周縁部が円形状をなして該レバー本体7と直交する方向へ延出する。レバー本体7の外周にはレバー本体7先端部側と可動フランジ10との間で圧縮されたばね11が設けられ、オイルダンパ12におけるシリンダチューブ13がレバー本体7の内部中空部に固定され、ピストンロッド15が可動フランジ10に連結されている。
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石に対する着磁パターン等を含む構成の簡素化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】各磁気センサ16a〜16gにおいて生成される二値信号の組合せがハミング符号をなすように磁石15の着磁パターン及び当該磁石15に対する各磁気センサ16a〜16gの相対的な位置関係が調節されている。このため、シフト装置では、1つの磁気センサに何らかの異常が発生した場合であれ、当該磁気センサにおいて生成される二値信号を含む誤った二値信号の組合せを訂正し、正しい二値信号の組合せとすることができる。さらに、2つの磁気センサに何らかの異常が発生した場合にも、その異常の発生を検知することができる。
(もっと読む)
操作ペダル、および重ね合わせ溶接方法
【課題】操作ペダルを構成している2つの部材が重ね合わされて溶接される場合に、入熱量のアンバランスに起因する接合不良や熱歪の発生を抑制する。
【解決手段】ペダルアーム14のボス取付筒部32g、34gよりも外側へ突き出す軸方向の端部40a、40bの外径が小さくされることにより段差42a、42bが設けられており、そのボス取付筒部32g、34gの端縁から段差42a、42bに跨がるコーナー部分にプラズマアーク溶接が施される。このため、ボス取付筒部32g、34gとボス16との第2接合部W2に効率良く集中的に入熱することが可能で、熱歪の発生を抑制しつつ所定ののど厚Dを確保して接合強度を向上させることができる。また、段差42a、42bに連続する端部40a、40bから良好に放熱されるため、部材の溶け広がりが防止され、この点でものど厚Dの減少が抑制されるとともに、ボス16の内周面の熱歪が抑制される。
(もっと読む)
力覚提示型ジョイスティックならびに全方向移動対象物の操作制御装置および制御方法
【課題】 回転方向を含む複数方向について操作制限を可能にする力覚提示型のジョイスティックを提供するとともに、全方向移動対象物の操作について回転方向を含む方向に対する操作制限を可能にする操作制御装置および操作制御方法を提供する。
【解決手段】 ジョイスティックは、傾動および軸回りの回動が可能な操作レバーを支持する支持軸を備え、操作レバーおよび支持軸の角速度および回転角度を検出する検出手段と、操作レバーおよび支持軸に駆動力を付与するモータをそれぞれ設け、検出手段による検出値と所望数値との比較に基づいてモータを制御する制御手段を備える。全方向移動対象物の制御装置は、移動対象物の適宜位置に外部センサと、演算装置とを備える。制御方法は、全方向移動対象物に設けた外部センサにより障害物との距離および角度を検出し、インピーダンス制御によりモータの駆動力を制御する。
(もっと読む)
操作装置
【課題】操作フィーリング改善及びコスト増の改善のために部品点数を削減するとともに、操作ノブの操作時に該操作ノブの姿勢が変わることのない操作装置を提供する。
【解決手段】揺動レバー21をそのレバー軸線z周りの回転を規制する揺動機構とを備えるとともに、揺動レバー21の揺動先端側に可動操作部2が取り付けられた操作装置1であって、揺動レバー21の揺動先端側には、X軸方向延出部102と、球面中心をレバー軸線z上に有する球面部101とが形成され、可動操作部2には、X軸方向延出部102をY軸方向両側から挟み、球面部101をX軸方向両側及びY軸方向両側から挟む形で保持する摺動開口部150が形成されることにより、可動操作部2の二次元方向への移動操作が、その姿勢を常に一定に保持した平行移動の形でなされる。
(もっと読む)
ペダルアセンブリの抵抗機構
ペダルに印加される抵抗力を生成するための抵抗機構及びモジュール(10)。抵抗モジュールは、ペダルによりプランジャーに対して印加される圧縮力に応答して休止及び押下げ位置の間でモジュール内で移動するように適合したプランジャー(70)を含む。プランジャーは、外部カム面を含む。アクチュエータ(100)もまたモジュールの内部に位置し、外部カム面に当接し、プランジャーの移動に応答してプランジャー上の外部カム面に対して滑動するように適合した外部カム面を含む。モジュール内のスプリング(94)は、アクチュエータに当接し、アクチュエータにバイアス力を印加するように適合される。プランジャーとアクチュエータの外部カム面の間の相互作用が、ペダルに印加される抵抗を生成する。 (もっと読む)
左右連動操作装置
【課題】左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供する。
【解決手段】左右連動操作装置は、操作者が手にするグリップ4,5が左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つのグリップ4,5のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つのグリップ4,5の各々の操作量を検出可能である。左右連動操作装置は、グリップ4,5の操作有無を検出するタッチセンサ30,31と、操作状態を判定する操作状態判定部37aと、操作状態判定部37aによって片手操作を検出した際、操作されていない側のグリップ4,5に設けられたロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する補正部37bとを備えた。
(もっと読む)
ノブ
【課題】十分な肉抜き構造をもったノブを低コストで簡便に実現する。
【解決手段】ノブをノブキャップ51とムービングブロック70とから構成する。ムービングブロック70をノブキャップ51内に挿入し、ノブキャップ51の開口端である拡径部56の内面に形成した爪60をムービングブロック70の嵌合部76に形成した係止穴80に係止させて結合する。ノブキャップ51の底壁52の内面には、軸心を中心とする円周上3等分位置に、先端に傾斜面64を備える突起63が設けられ、ムービングブロック70はリング状前壁71の内周縁の角を傾斜面64に当接させることにより、ノブキャップ51と自動的に芯合わせされる。ムービングブロック70を自由に肉抜きできるとともに、汚れや作業工数を伴う接着剤も用いずに芯合わせされ、かつ軸方向にガタのない一体化したノブ50が得られる。
(もっと読む)
101 - 120 / 300
[ Back to top ]