
Fターム[3J552PA32]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 車両関係 (1,319) | 加速性能 (362)
Fターム[3J552PA32]に分類される特許
81 - 100 / 362
車両の動力伝達制御装置
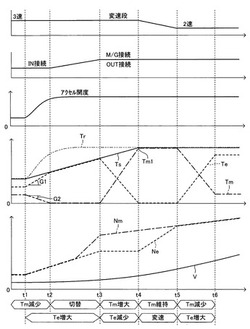
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、キックダウン時において電動機接続状態を適切に切り替えること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、並びに、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構を備える。キックダウン条件が成立すると(t1)、先ず、電動機接続状態をOUT接続状態に切り替える切り替え作動がなされる(t2〜t3)。その後、変速機減速比を増大する変速作動がなされる(t4〜t5)。キックダウン条件成立後、E/G側出力トルクTeとM/G側出力トルクTmとの和Tsが増大し続けるようにTeとTmが調整される(t1〜t4)。
(もっと読む)
自動変速機の制御装置

【課題】車両が連続して旋回するワインディング状態において、状況に応じた適切なプレシフト制御を実行しつつ、制御負荷を低減できる自動変速機の制御装置を提供する。
【解決手段】ECUは、旋回判定処理において、車両が連続して旋回するワインディング状態であると判定した場合(第8のタイミングt8)、プレシフト変速段を自動変速機の現時点の変速段よりも低速側の変速段に設定する。そして、ECUは、ダウンシフト側へのプレシフト制御を実行する。
(もっと読む)
自動変速機の制御装置
【課題】車両の走行状態を適切に検出し、該走行状態に応じた適切なプレシフト制御を実行できる自動変速機の制御装置を提供する。
【解決手段】ECUは、従動輪である各後輪の車輪速度差REVdiffを算出し、該車輪速度差REVdiffが旋回開始判定閾値STthを超える場合に、車両が旋回中であると判定する(第2のタイミングt2)。そして、ECUは、プレシフト変速段を自動変速機の現時点の変速段よりも低速側の変速段に設定し、ダウンシフト側へのプレシフト制御を実行する。
(もっと読む)
車両の制御装置
【課題】運転者に違和感を与えるのを抑制しつつ好適に電子スロットル弁の特性を設定できる車両の制御装置を提供する。
【解決手段】自動変速機16の変速に際して、アクセル開度ACCの変化量ΔACCが予め定められた閾値A0より小さい場合には、変速前の変速段に対応する特性を維持する一方、アクセル開度ACCの変化量ΔACCがその閾値A0より大きい場合には、変速後の変速段に対応する特性へと移行するものであることから、変速に際して電子スロットル弁24の特性が変化することにより運転者の意図しない加減速が発生するのを好適に抑制することができる。すなわち、運転者に違和感を与えるのを抑制しつつ好適に電子スロットル弁24の特性を設定できる車両の制御装置を提供することができる。
(もっと読む)
過給機付き内燃機関の制御装置
【課題】本発明は、過給機付き内燃機関の制御装置に関し、点火プラグのくすぶりを確実に抑制することを目的とする。
【解決手段】本発明の過給機付き内燃機関の制御装置は、内燃機関の冷却水温が所定温度より低い極低温状態であるか否かを判定する極低温判定手段と、極低温状態であると判定された場合に、ウェイストゲート弁を開放するか、または吸気通路に設置されたスロットル弁の開度を制限することにより、筒内空気量を抑制する空気量制御を実行する空気量抑制手段と、空気量制御が実行された場合に、通常制御時よりも機関回転数が高くなるようにトランスミッションの変速線を変更することにより、機関出力を補償する変速線変更手段とを備える。変速線変更手段は、機関回転数の上昇によるフリクション増加分を考慮して機関回転数の上昇代を設定する。
(もっと読む)
自動変速機の変速制御装置
【課題】変速段の変速時における変速の応答性を確保できる自動変速機の変速制御装置を提供すること。
【解決手段】変速段の変速時に、変速前の変速段が2つの摩擦係合要素40を係合することにより形成されている場合に、2つの摩擦係合要素40のうち一方を解放し、他方を係合することによって形成される他の変速段を変速時の候補となる変速段である初期判断候補変速段とし、初期判断候補変速段に変速する際に解放する摩擦係合要素40と同じ摩擦係合要素40を解放し、初期判断候補変速段に変速する際に係合する摩擦係合要素40とは異なる摩擦係合要素40を係合することにより形成される変速段であり、且つ、変速前の変速段に対する変速比の変化する方向が同じ方向で、初期判断候補変速段とは変速比が異なる変速段を追加候補変速段とし、初期判断候補変速段と追加候補変速段とが存在する場合に、これらの変速段のうちより適切な変速段に変速する制御を行う。
(もっと読む)
車両の変速比制御装置及び変速比制御方法
【課題】要求駆動力に対する加速レスポンスの悪化を抑制することが可能な、車両の変速比制御装置及び変速比制御方法を提供する。
【解決手段】消費エネルギー効率判定手段44が、車両の速度に対応する変速比領域を設定した通常変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費する通常消費エネルギーよりも、通常変速マップよりも低速側の変速比領域を高速側へ拡大したローギア領域拡大変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費するローギア消費エネルギーの効率が良いと判定すると、ローギア領域拡大変速マップに基づいて、駆動輪とモータとの間に介装した変速機の変速比を変更する。
(もっと読む)
自動マニュアルトランスミッションの変速制御装置
【課題】2つの発進クラッチを有する自動マニュアルトランスミッションで変速の実行を制御する変速制御装置を提供する。
【解決手段】本発明による変速制御装置100は、2つの発進クラッチを有する自動マニュアルトランスミッションで変速の実行を制御する装置であり、アップシフト待機線及びダウンシフト待機線に基づきプリシフトを実行し、且つ変速マップ内のアップシフト線及びダウンシフト線に基づき変速を実行する際に、現在の車両の走行状態を判定する走行状態判定部102と、現在の車両の走行状態に応じて、アップシフト待機線及びダウンシフト待機線を変更するシフト待機線変更部103とを備える。
(もっと読む)
車両用無段変速機の制御装置
【課題】エンジン始動時に車両用無段変速機の変速比を最低速側変速比に変更するに際して、好適に変速比を変更することができる車両用無段変速機の制御装置を提供する。
【解決手段】ベルト戻し制御手段164実施に際して従動側油圧アクチュエータ46cに油圧が供給される際、その従動側油圧アクチュエータ46c内に作動油が充満されたか否かを判定する充満判定手段168に基づいて、充満時間検出手段170が、従動側油圧アクチュエータ46cへの作動油の供給開始からアクチュエータ内に作動油が充満されるまでの充満時間tfを検出する。そして、戻し制御時間設定手段166が、充満時間tfに基づいてベルト戻し制御手段164を実施する最適な戻し制御時間tcを設定するため、ベルト戻し制御が最適な戻し制御時間tcだけ実施される。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、電動機の出力軸の接続状態を適切に選択して駆動輪に伝達される電動機の最大駆動トルク(電動機駆動輪最大駆動トルク)を適切に調整すること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の3つの状態の何れかに選択可能な切替機構を備える。この選択は、車速Vと要求駆動トルクTとの組み合わせ(領域)に基づいてなされる。係る選択の際、走行抵抗トルクが大きいほど、OUT接続領域及びニュートラル領域に比して電動機駆動輪最大トルクが大きい第1、第2IN接続領域が拡大される。
(もっと読む)
変速制御装置
【課題】変速制御装置において、アップシフトによる駆動トルクの低下を抑制してドライバビリティの向上を可能とする。
【解決手段】自動変速機32によるアップシフト前のエンジン回転数を検出する回転数検出手段と、記自動変速機32によるアップシフト後のエンジン回転数を推定する回転数推定手段と、アップシフト前の実回転数とアップシフト後の推定回転数とエンジン回転数に応じた機関最大トルクと基づいて自動変速機32によるアップシフトの許可と禁止を判定するアップシフト判定手段とを設ける。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ドライバーの加速フィーリングの向上を図ると共に、車両パワーを円滑に推移させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを駆動系に備えると共に、無段変速機CVTの変速制御を実行する変速制御手段(図5)を備えたハイブリッド車両の制御装置において、モータMG及びバッテリ9の状態から、モータアシスト可能なアシストパワー量を算出するアシストパワー量算出手段(ステップS4)を備えている。そして、変速制御手段(図5)は、無段変速機CVTの変速比をダウンシフト方向に変速する車両加速中に、この変速比をアップシフト方向に間欠的に変速する。さらに、このアップシフトに伴って生じるエンジンパワー減少量は、アシストパワー量以下にする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両のショック発生を抑制しつつ、ドライバー操作に対するドライバビリティを向上することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、エンジンEngとモータMGとの間に配置された第1クラッチCL1と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを備えたハイブリッド車両の制御装置において、無段変速機CVTの変速制御を実行する変速機制御手段(図2A,図2B)は、車両走行中に発生したエンジンのON/OFFフラグ変化に伴って生じるトルク変化に応じて、無段変速機CVTの変速速度d(ra)を変化させる。
(もっと読む)
自動変速機の変速制御装置
【課題】より確実に適切な変速を行うことができる自動変速機の変速制御装置を提供すること。
【解決手段】要求駆動力を実現できる自動変速機20のギヤ段が無い場合において、例えば車両の加速時の場合には、発生可能最大トルクTmによってギヤ段ごとの最大パワーを発生することのできるエンジン10の回転数と、要求パワーPrを発生する際におけるエンジン10の回転数とトルクとが総合的に最も近くなるギヤ段パワーを駆動輪に対して出力できるギヤ段を、現在の運転状態に適したギヤ段としてギヤ段選択部71で選択する。これにより、要求駆動力が大きく、要求駆動力を発生させることができない場合でも、要求パワーPrに最も近いギヤ段パワーを発生させることのできるギヤ段を選択するため、車両の走行時における運転者の要求を、自動変速機20の変速制御に最大限反映させることができる。この結果、より確実に適切な変速を行うことができる。
(もっと読む)
電動車両の制御装置
【課題】減速後の再加速要求に対する車両の加速応答性を確保することができる電動車両の制御装置を提供すること。
【解決手段】車両制御部(図7)は、走行情報検出手段(環境情報検出部22,操作情報検出部23)により検出された走行環境情報又は車両操作情報の少なくとも一方に基づき車両が減速することを予測する減速予測手段(ステップS101,102)と、減速が予測された際に、車両の減速開始前に変速機の変速比を下げる変速比低減手段(ステップS103,104,105,106,108)と、変速比の低減開始から車両の減速開始までの間、モータの回転数制御を実行して車速を維持するモータ制御手段(ステップS107)と、車両減速中ジェネレータを駆動して回生エネルギーの回収を行うジェネレータ制御手段(ステップS110)と、を有する。
(もっと読む)
無段変速機の制御装置
【課題】車両停止時の変速の際や微速走行時において燃費の悪化を抑制しながら、無段変速機の変速比を最大変速比γmaxに確実に保持することが可能な制御を実現する。
【解決手段】車速が判定閾値B以下で、かつ、当該無段変速機の変速比が判定閾値A以上のときに、最大変速比判定条件が成立したと判定して、プライマリシーブ油圧の下限ガード処理を解除して、プライマリシーブ油圧を、通常制御時のプライマリ側油圧アクチュエータの油圧以下に下げる。このような制御により、車両停止時に無段変速機の変速比を確実に最大変速比γmaxに保持することができる。しかも、セカンダリシーブ油圧を上げることなく、変速比を最大変速比γmaxにすることができるので、燃費の向上をはかることができる。また、微速走行時に、変速比が増速しなくなり、駆動力不足による発進不良を回避することができる。
(もっと読む)
電動車両の制御装置
【課題】発進時のクラッチスリップ締結状態からクラッチロックアップ締結、その後のアップシフト開始までの制御時間の短縮を図ることができる電動車両の制御装置を提供すること。
【解決手段】発進時、駆動源と駆動輪(左右後輪)RL,RRとの間に介装されたクラッチ(第2クラッチ)CL2のスリップ締結状態を維持するWSC走行制御を実行する発進制御手段(図7)を備えた電動車両の制御装置において、発進制御手段は、クラッチCL2をスリップ締結からロックアップ締結へと移行させるWSCロックアップ制御部(ステップS102)と、クラッチCL2のロックアップ締結完了までの時間を予測するロックアップ完了時間予測部(ステップS103)と、予測されたクラッチCL2のロックアップ締結完了のタイミングよりも、変速機ATのアップシフトの応答時間T分早めたタイミングで変速機のアップシフト制御を開始する繰上アップシフト制御部(ステップS108,109)と、を有する。
(もっと読む)
ハイブリッド車両の変速制御装置および変速制御方法
【課題】回生制動後に大きなモータトルクでエンジンをクランキングできる新規なハイブリッド車両の変速制御装置および変速制御方法の提供。
【解決手段】ブレーキペダルが操作されたときは、前記モータMGの回生制動時に、当該モータMGによる回生効率が所定値以上になる前記モータMGの回生目標回転数となるように前記変速機ATの変速比を制御する。その後、前記モータMGによるエンジンEのクランキング要求または再加速要求があるときには、当該クランキング時または再加速時に前記モータMGのトルクが所定値以上となる前記モータMGの力行目標回転数となるように前記変速機の変速比を制御する。これによって、回生制動後に大きなトルクでエンジンをクランキングできるため、エンジン始動の遅れを回避して加速不良を防止できる。
(もっと読む)
車両用自動変速機の制御装置
【課題】一方向クラッチの係合により成立させられる変速段へ向かう変速過渡期間内にて加速要求がなされた際に、ドライバ要求量に応じた適切な駆動力を得る。
【解決手段】目標ギヤ段決定手段116により3→1コーストダウン中の加速要求時の推定ドライバ要求量に基づいて自動変速機10の目標変速段GDが決定され、目標ギヤ段切替判定手段118により推定ドライバ要求量に基づく目標変速段GDが第1所定変速段であると判定されたときは同期前制御手段110により第1所定変速段への変速が継続されるが、目標ギヤ段切替判定手段118により推定ドライバ要求量に基づく目標変速段GDが第1所定変速段とは別の変速段であると判定されたときは同期前制御手段110により第1所定変速段への変速が中止されると共に変速制御手段104によりその別の変速段への変速に切り替えられるので、加速要求に見合った車両駆動力が適切に得られる。
(もっと読む)
自動変速機の変速制御装置
【課題】係合側油圧の学習精度を高め、変速時のドライバビリティを向上できる自動変速機の変速制御装置を提供する。
【解決手段】トランスミッションECUは、ダウンシフト指示を取得すると、エンジンをトルクアップし、タービン回転数NT[A]を取得する(ステップS12)。そして、計測時間Tの経過後に、タービン回転数NT[B]を取得し(ステップS14)、タービン回転数の変化勾配を実ΔNTとして算出する(ステップS15)。また、車速およびエンジントルクTeに基づいて目標ΔNTを算出する(ステップS16)。トランスミッションECUは、実ΔNTが目標ΔNT以上であるならば、今回の係合側油圧Pから補正油圧ΔP'を減算した値を次回の係合側油圧とし(ステップS18)、実ΔNTが目標ΔNT未満であるならば、今回の係合側油圧Pに補正油圧ΔPを加算した値を次回の係合側油圧とする(ステップS19)。
(もっと読む)
81 - 100 / 362
[ Back to top ]