
Fターム[4C097AA12]の内容
補綴 (46,288) | 適用又は代替する身体箇所又は身体部位 (7,438) | 人工骨・骨等の骨格 (3,787) | 手・腕・肩等の上肢 (413) | 指 (95)
Fターム[4C097AA12]に分類される特許
1 - 20 / 95
電動義手

【課題】作動音を低減して静粛性を高めつつ、軽量化を図ることのできる電動義手を提供する。
【解決手段】義手本体10に支持された第1指部35及び第2指部42を回動させる駆動源として、高分子材料により形成され、電圧印加に応じて弾性変形し、電圧印加の停止に応じて元の形状に復元することにより直線往復運動する高分子アクチュエータ50を用いる。上記直線往復運動を回動運動に変換して各指部35,42に伝達する動力伝達部60を設ける。高分子アクチュエータ50から動力伝達部60を経て両指部35,42に至る動力伝達経路に、両指部35,42を含む複数のレバーを有するリンク機構70を設ける。これらのレバーの少なくとも1つを、支点、力点及び作用点を有するてことして機能させる。そして、力点を通じてレバーに入力される変位量を増幅して、作用点から出力させる。
(もっと読む)
電動義手

【課題】簡単な構成でより人間の手に近い動きが得られる安価な電動義手を提供する。
【解決手段】 人指し指に該当する第一義指4と、中指に該当する第二義指5と、薬指に該当する第三義指6と、小指に該当する第四義指7と、親指に該当する第五義指8と、各義指を支持する基台2と、この基台2を支持する腕部とからなる。そして、基台2に義指を動かす複数のモータを取り付け、このモータに対応してモータの回転方向と起動とを操作する複数のスイッチを設けた。
(もっと読む)
人間型ハンド
【課題】実用性を高めた簡潔構造の人間型ハンドを提供することである。
【解決手段】手の骨格を有する人間型ハンド100において、前記人間型ハンド100の掌骨格に複数の掌部2、3、4を固定し、前記複数の掌部2、3、4のそれぞれが、シート部材21、31、41に弾性部材22、23、24、32、42を貼付して成り、前記人間型ハンド100によって対象物を掴む際に、前記複数のシート部材2、3、4同士が重なり合うとともに該シート部材21、31、41が撓んで、前記弾性部材22、23、24、32、42が前記対象物を支持することを特徴とする。
(もっと読む)
可変シート及びこの可変シートを用いた身体装着具
【課題】使用時に外部電源との接続が不要で各種用途に広く使用可能な可変シート及びこの可変シートを用いた身体装着具を提供する。
【解決手段】本発明は、一のフレキシブルシート体2の板面に沿って該シート体2に設けられ、該シート体2を変形させるシート状のポリマーアクチュエータ3と、シート体2の板面に沿ってシート体2に設けられ、ポリマーアクチュエータ3と電気的に接続されたシート状の蓄電素子4と、ポリマーアクチュエータ3と蓄電素子4との間に設けられた制御部6とを備えていることを特徴とする。
(もっと読む)
義手
【課題】簡単な構成でより人間の手に近い動作範囲が得られる義手を提供する。
【解決手段】人差し指に該当する第一義指2と、中指に該当する第二義指3と、薬指に該当する第三義指4と、小指に該当する第四義指5と、親指に該当する第五義指6と、各義指を支持する基台1・25とからなり、第一ないし第四義指には、末節骨に該当する第一部材7と、第一部材に回動自在に軸支される中節骨に該当する第二部材8と、第二部材に回動自在に軸支される基節骨に該当する第三部材9と、第三部材に回動自在に軸支される中手骨に該当する第四部材10と、第一部材と前記第三部材とを接続する第一連結部材11と、第二部材と第四部材とを接続する第二連結部材12と、第三部材を回動する第一駆動機13とを設ける。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
アクチュエータ
【課題】簡素な構成で屈曲運動を生成可能なアクチュエータを提供する。
【解決手段】チューブ10は、その内部に流路12を有する。固定手段20は、チューブ10が湾曲するようにチューブ10を束ねるとともに、束ねた箇所におけるチューブ10の厚みを所定値dにて制限する。圧力源30は、チューブ10の流路12に流体を供給する。チューブ10は、その内部への加圧がない状態において偏平な形状を有しており、固定手段20は、チューブ10の一方の偏平面の2箇所が向き合うようにクランプする。
(もっと読む)
鞘付きトング
【課題】パソコンやタッチパネル式の電子機器を操作しながら食事をとらねばならない場合、衛生面から、素手で掴む形式の食品は敬遠されがちであった。又、怪我や障がいの為に、一般的な食事の為の道具の使用が難しい人は、気軽に外で食事をとることができなかった。両方の解決策として衛生面に配慮したトングを提供する。
【解決手段】トングの、対象物に触れる部分( 2 )を、分解可能な鞘( 6 )に収納する。それにより、トングを衛生的に持ち運ぶことが可能となる。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
人工手
【課題】皮膚変形特性がヒトに近い人工手を提供する。
【解決手段】本発明の人工手は、ヒトの皮膚程度に柔軟な材料からなる繊維部と、該繊維部よりも柔軟な内部組織を持つ多数個の袋群と、周りを覆う該繊維部よりも硬い膜と、からなることを特徴とする。皮膚変形特性がヒトに近く、例えば、人工手の上をワイヤーが通過する場合、ワイヤーの進行側では人工手が押しつぶされてへこみ、通過側では元に戻り膨らむ形となる。ちょうどウェーブ状の変形であり、これはヒトの指や手においても観測できる。人工手の大きさをヒト指と同程度にすれば、ヒト指と人工指とでワイヤーを挟んで擦ることでVHIを発現する。また、皮膚変形特性がヒトに近いことから、ヒトと同等もしくはそれ以上の、受動的な把持安定性の実現や、内部に触覚センサを埋め込むことによりヒトと同等の触感センシング、または、ヒトと同等もしくはそれ以上の高感度な触覚センシングが可能となる。
(もっと読む)
関節固定用のインプラント
本発明は、二つの骨の間の骨融合のためのインプラント(1)に関し、このインプラントは、長手方向軸Aを備えて、第1の骨に挿入される第1の部分(20)と、第1の骨にインプラントを取り付ける第1の手段(24)と、長手方向軸Bを備えて、第2の骨に挿入される第2の部分(30)と、第2の骨にインプラントを取り付ける第2の手段(34)と、を備えており、第1の部分及び第2の部分(20,30)は、中心核(40)により互いに結合されており、中心核は固形体であり、長手方向軸Aに対して垂直面での横断面は、少なくとも3つの点(41,42,43)を備える星形状であり、第1の部分は少なくとも3つのタブ(21,22,23)を備え、各々のタブは、中心核の複数の点の一つである自由端(41a,42a,43a)から長手方向軸Aに沿って概ね延出している。 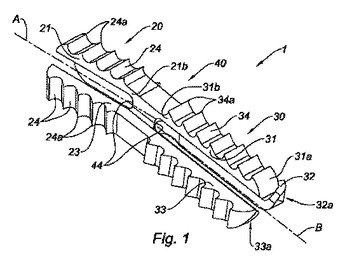 (もっと読む)
(もっと読む)
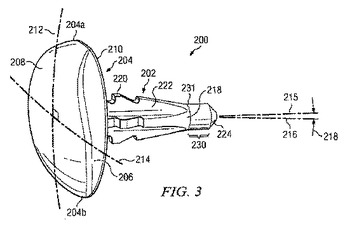
表面補強用インプラント
骨の関節端面上に用いるためのインプラントは、凹状の内面上を覆う凸状の外面を持つキャップと前記内面から突出するステムであって、前記内面の縁部が、前記ステムを囲むと共に前記ステムの前記内面に連なる部分に張り出しており、前記ステムは、前記ステムの先端近傍に始まり、前記縁部によって張り出される部分まで延びる長さ部分に対して平行に形成された複数の隆起リッジを含むステムを備える。
 (もっと読む)
(もっと読む)
ポリマーコンポーネントを形成する方法
本発明は、ポリマーコンポーネントを形成する方法に関し、ポリマー粒子を抗酸化剤と混合して抗酸化剤がポリマー粒子を被覆している混合物を形成し、ポリマー粒子を放射線照射してその中のポリマー粒子を架橋して、照射した混合物を圧密化したコンポーネントに形成することを含む。本発明は、補綴物のための関節表面およびポリマーの関節の、少なくとも一つの所定の部分に架橋ポリマーの接着部材を備えるベアリング表面を有する補綴物を形成する方法にも関する。 (もっと読む)
筋電位測定義手用アームカバー
【課題】筋電位を確実に測定することができ、身体の動きに追従する柔軟性を有すると共に、検出電極部に接続する配線が所定の位置から離脱して露出するようなことがない筋電位測定義手用アームカバーの提供。
【解決手段】筋電位を測定する検出電極部3と、該検出電極部3からの信号を伝送する配線2と、該配線2を織り込んだテキスタイル1とが少なくとも備えられたことを特徴とする筋電位測定義手用アームカバー10。
(もっと読む)
装着型動作支援装置
【課題】簡素な構成でありながら、三節部位を自然な屈曲姿勢とすることができ、装着者の骨関節に負担をかけることがなく、小型で、装着性が良好で、信頼性を向上させることができるようにする。
【解決手段】単関節駆動部は、単一の関節軸を支持し、ベース部に固定された関節軸支持部と、関節軸を中心に回転可能な駆動アーム部と、駆動アーム部に取り付けられるとともに、三節部位に装着される装着部とを備え、装着部は、三節部位の先端節に装着され、関節軸の位置は、駆動アーム部が目標到達位置にあるときに三節部位の2つの関節が屈曲し、かつ、装着部から関節部までの距離が、駆動アーム部が目標到達位置にあるときと、動作開始位置にあるときとで等しくなるように設定される。
(もっと読む)
被覆医学装置
【課題】移植片の寿命を延長するのに有効な程度まで、磨耗片の離脱を最小限に抑制し、又は微小亀裂が生成し、及び/又はその大きさが増大するのを防ぐことができる表面を有する医学装置の提供。
【解決手段】医学装置は、表面を有する構造部材を備え、その表面の少なくとも一部は、少なくとも約25μmの厚みのナノ組織材料によって被覆され、このナノ組織材料は、セラミック、セラミック複合材料、セラミック/金属複合材料、又はこれらの少なくとも1つを含む組合せを含んでおり、ナノ組織セラミック複合材料は、セラミック複合材料の全体積に基づいて、少なくとも51体積%の硬質相セラミック材料と、結合剤相とを含み、結合剤相は、SiO2など、又はこれらの少なくとも1つを含む組合せを含んでいる。この移植片は、改良された耐磨耗性と耐剥離性によって、寿命が延長され、関節式継手又は柔軟性ヒンジ継手を部分的又は完全に置換するのに有益である。
(もっと読む)
人間把持支援デバイスおよび使用方法
【課題】本発明は、人間把持支援デバイスおよび使用方法を提供することを目的とする。
【解決手段】把持支援デバイスが、指骨リングを有するグローブ部分と、グローブ部分を着用しているオペレータにより加えられる把持力を測定するための接触センサと、腱駆動システム(TDS)とを備える。このデバイスは、センサからのフィードバック信号に応じてリングを動かすための、指骨リングに連結された可撓性腱を有する。TDSは、腱のそれぞれに連結され、把持力に応じて増強引張力を決定するように適合されたマイクロコントローラを介して、腱に対して増強引張力を加える。オペレータの把持力を増強する方法は、センサを使用して把持力を測定するステップと、フィードバック信号として把持力をエンコードするステップと、マイクロコントローラを使用してフィードバック信号に応じて増強引張力を計算するステップとを含む。この方法は、腱駆動システム(TDS)の少なくとも1つのアクチュエータに通電して、増強引張力を加えるステップを含む。
(もっと読む)
義指装置
【課題】 物品を確実に把持することが可能な義指装置を安価に提供する。
【解決手段】 指骨格12を第1アクチュエータ71で屈曲・伸長し、指骨格12を覆う袋体52〜55内部に粉体を充填し、指骨格12の屈曲後に袋体52〜55の内部を第2アクチュエータ73で真空引きして固化するので、袋体52〜55が固化していない状態で指骨格12を屈曲させて義指を物品の表面に当接させ、柔軟な袋体52〜55の形状を物品の形状に沿うように馴染ませた後に袋体52〜55を固化することで、特別に強い把持力を必要とせずに物品を確実に把持することができる。しかも第1アクチュエータ71は指骨格を屈曲・伸長させることが可能であれば、センサ等を用いて義指の把持力や屈曲量を制御する等の複雑な制御を行う必要はなく、また第2アクチュエータ72は袋体52〜55の内部を真空引できるものであれば良いため、極めて低価格で実現することができる。
(もっと読む)
円板形状の整形外科用デバイス
種々の関節症状を治療するための方法および装置は、関節腔の中に挿入されるデバイスを含む。送達中に、デバイスの外形は、組織および/または骨に対する侵襲的影響を最小化するために、少なくとも1つの寸法において拘束される。デバイスは、ネジ付きまたは剛性の細長部材によって埋め込みのために拘束されてもよい。挿入後、デバイスは、埋め込み部位において拡張してもよい。一実施例では、患者の関節の中に挿入されるように構成される整形外科用インプラントは、略平面の構成を有する本体と、平面構成に直交する第1の寸法と、インプラントの挿入の方向に直交する第2の共平面寸法と、本体によって少なくとも包囲される内側領域と、第1の寸法における本体の高さを第1の寸法における内側領域の高さに徐々に低減するように構成される少なくとも1つの遷移領域とを備える。 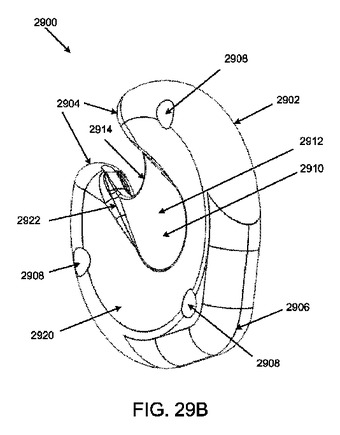 (もっと読む)
(もっと読む)
電動義手
【課題】軽量でかつ製造コストの低い電動義手を提供することを目的とする。
【解決手段】独立して駆動され、骨格部と駆動機構を各々が備える複数の指部と、複数の指部を駆動するアクチュエータと、を備え、骨格部が繊維強化プラスチックから構成される電動義手。この骨格部は、関節部分が繊維強化プラスチックからなるヒンジ機構からなることが好ましい。複数の指部の付け根側を固定、保持する手掌部を備える場合には、手掌部は、独立して動く複数の領域に区分されていることが好ましい。この場合、手掌部は、繊維強化プラスチックから構成され、隣接する前記領域が当該繊維強化プラスチックからなるヒンジ機構により接続されていることが好ましい。
(もっと読む)
1 - 20 / 95
[ Back to top ]