
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
261 - 280 / 1,504
画像処理システム及び方法
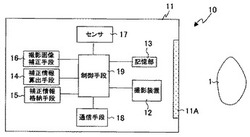
【課題】高圧環境下で撮影しても、常圧環境で撮影した画像と同等の画像が得られる、画像処理システム及び方法を提供する。
【解決手段】ビューポート11Aを有する耐圧容器11内の撮影装置12を用いビューポート11Aを経由して耐圧容器11外の撮影対象物1を撮影して生成した撮影画像を処理する。撮影装置12により形成される像が耐圧容器11外の媒質の状態及びビューポートの状態に応じて移動する量に関して、補正情報を格納する補正情報格納手段15と、耐圧容器11が高圧環境下にある状態で、撮影装置12で生成される撮影画像上の撮影対象物1における各対象点への視線ベクトルを、補正情報格納手段15に格納されている補正情報により補正して、撮影画像を処理する撮影画像補正手段16と、を備える。
(もっと読む)
ステレオ画像処理装置、画像処理方法及びプログラム

【課題】 撮影画像の画質及び距離画像の精度を向上することのできるステレオ画像処理装置を提供する。
【解決手段】 マッチング回路18は、増幅回路16から出力される2つの映像信号に対して周知のマッチング処理を行い、画像のずれ量を示す信号を出力する。距離画像生成回路20は、マッチング回路18からの出力を受けて、撮影対象物までの距離を測定して距離画像を生成する。加算回路22は、増幅回路16から出力される映像信号の一方に対して、画像のずれ量に相当する分だけ画像をずらした後に、2つの映像信号を加算することで、低輝度域や中輝度域におけるノイズ成分を低減する。加算回路22からの出力信号に対し、非線形処理回路24による非線形処理が施され、監視用画像が出力される。また、増幅制御回路28では、増幅回路16から出力される映像信号のレベルが所定範囲内に入るように、増幅回路16での増幅率を制御する。
(もっと読む)
画像処理装置及び移動体位置推定方法
【課題】周囲の状況に関わらず自己の位置の推定精度を向上させる。
【解決手段】予め周囲地図記憶部11に記憶された移動体の周囲の特徴情報22と当該特徴情報22の位置情報21とを取得し、地図内面構造設定部12が複数の特徴情報22を含む領域の面構造を設定し、地図内特徴点可視性判断部13が、面構造によって、移動体の位置から特徴情報22が撮像不能である場合に、当該特徴情報を可視性がないと判定し、自己位置推定部15が、移動体の周囲の特徴情報22のうち可視性がないと判定された特徴情報22を除いて、取得された特徴情報22及び位置情報21と自己の位置から撮像した撮像画像内の実特徴とに基づいて、移動体の位置を推定する。
(もっと読む)
画像処理装置、画像処理方法、及び、画像処理プログラム
【課題】画像レジストレーションの処理速度を向上する画像処理装置を提供する。
【解決手段】参照画像と浮動画像との位置を合わせる画像処理システムであって、前記画像処理システムは、前記参照画像の画素値の1次元のヒストグラムを生成し、前記生成された参照画像のヒストグラムの各ビンに属する画素の位置を記憶装置に格納する第1の手段と、所定の幾何変換情報に従って浮動画像の座標を変換し、前記生成された参照画像のヒストグラムの一つのビンに属する参照画像の画素の位置に対応する前記変換された浮動画像の画素の画素値の頻度を示す、浮動画像の1次元ヒストグラムを、ローカルメモリ上に生成する処理を実行する第2の手段と、前記生成された浮動画像の1次元ヒストグラムを合成することによって、前記浮動画像の2次元の結合ヒストグラムを生成する第3の手段と、を備える。
(もっと読む)
運転支援装置、及びその方法
【課題】特定の領域が存在する場合でも、必要に応じて逸脱する可能性を運転者に警告できる運転支援装置、及びその方法を提供する。
【解決手段】自車両の運転を支援する運転支援装置であって、予め定められた特定領域を検出する領域検出手段と、自車両が走行車線から逸脱して特定領域へ進入したか否かを判断する進入判断手段と、特定領域の周辺に存在する障害物を検出する障害物検出手段と、進入判断手段による特定領域へ進入したか否かの判断結果と、障害物検出手段による障害物の検出結果とに応じて自車両の運転を支援する運転支援手段とを備える。
(もっと読む)
画像処理装置
【課題】医師や技師等による弁膜症に関する作業効率や診断精度の向上を可能とする画像処理装置の提供。
【解決手段】記憶部11は、被検体の心臓領域に関する3次元画像を記憶する。断面設定部13は、前記心臓領域に含まれる血管領域に断面を設定する。輪郭抽出部15は、前記断面における前記血管領域から前記血管領域の輪郭を画像処理により抽出する。評価円生成部17は、前記輪郭の形状に基づいて心臓弁の形状を模式的に表現する模式的弁画像を生成する。弁画素特定部19は、前記模式的弁画像を構成する画素毎に、前記3次元画像に含まれる前記心臓弁に関する弁画素を既定方向に沿って探索し、前記弁画素があるか否かを特定する。色付き評価円生成部21は、前記模式的弁画像と前記弁画素があるか否かの情報とに基づいて前記心臓弁の開閉度合いを画素毎に色で表現する色画像を生成する。
(もっと読む)
対応点探索のための画像処理方法
【課題】
対応点探索において、NCCフィルタリングに関するジレンマを解決する。
【解決手段】
画像パッチ間の類似性を比較する方法であって、それぞれが少なくとも一つの画像パッチを供給する少なくとも2つの画像供給源から、少なくとも2つの画像パッチを受信するステップと、受信された画像パッチを比較するステップと、を有し、前記比較するステップは、各画像パッチから複数の対応関係にある部分画像ペアを抽出するステップと、すべての前記部分画像ペアの間で正規化局所類似度スコアを算出するステップと、すべての前記部分画像ペアの局所類似度スコアの総和を計算して総マッチングスコアを算出するステップと、総マッチングスコアを画像パッチの類似度指標として用いて、総マッチングスコアに基づき、対応関係を持つ類似画像パッチを決定するステップとを有する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。
(もっと読む)
カメラ位置決定方法
【課題】複数の検査対象物を一台のカメラで撮影するためのカメラ位置を決定することが可能となる、カメラ位置決定方法を提供する。
【解決手段】カメラ位置決定方法は、仮設定工程(ステップS11〜S15)と、被写界深度判定工程(ステップS21〜S26)と、画素数判定工程(ステップS31〜S33)と、再仮設定工程(ステップS41)と、を備え、画素数判定工程において、カメラCにおける検査対象物P1・P2の画素数が予め設定した必要画素数未満であると判定した場合は、画素数判定工程で算出した画素数が必要画素数以上と判定されるまで、再仮設定工程と、被写界深度判定工程と、画素数判定工程と、を繰り返す。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】精度良い3Dモデルを効率良く得ることを可能にする。
【解決手段】撮像制御部21は、投影装置13が動作していない状態と投影装置13が対象物体に所定のドットパターンを投影している状態とで、撮像装置12に対象物体を撮像させて、テクスチャ画像のデータ、第1ドット画像のデータと第2ドット画像のデータの複数の組からなる複数の3Dモデル画像セット候補を取得する。3Dモデル画像セット選抜部25は、複数の3Dモデル画像セット候補に含まれる複数の撮像画像のデータのうち、移動量の総和が最も小さくなるテクスチャ画像並びに第1ドット画像及び第2ドット画像の組を、3Dモデル画像セットとして選抜する。
(もっと読む)
映像再生装置及び映像再生方法
【課題】三次元表示に対する操作に関し、ユーザの利便性を向上させることができる映像再生装置及び映像再生方法を提供する。
【解決手段】映像再生装置1は、操作対象について視野差を有する第1の映像の対を生成する左右視野映像生成部233と、利用者の三次元の動作を認識する動き認識部22と、動き認識部22が認識した動作に基づいて前記操作対象を操作する操作信号を生成する操作信号生成部236とを有する。
(もっと読む)
撮像装置、長さ測定方法、及びプログラム
【課題】被写体上の指定された2点間の長さを精度良く測定する撮像装置を提供する。
【解決手段】被写体の指定された2点間の長さを測定する。撮像動作部100は、同一の被写体に対する1回の撮像で、視差のある1組のペア画像を取得する。表示部310は、取得されたペア画像の少なくとも一方の画像に基づく表示画像を表示する。操作部330は、表示画像上における被写体上の始点及び終点の指定を受け付ける。制御部210は、1又は複数組のペア画像に基づいて、指定された被写体上の始点及び終点における実空間上のそれぞれの位置を算出し、算出した実空間上の始点及び終点位置に基づいて、被写体上の始点から終点までの長さを取得する。
(もっと読む)
超音波データ処理装置
【課題】ボリュームデータ内の注目組織の特定精度を高められるようにする。
【解決手段】ボリュームデータに対して二値化処理が適用されて二値化ボリュームデータが生成される。一方、三次元データ空間内に三次元配置された球アレイの中から、二値化ボリュームデータに基づいて注目組織内に位置する球のみが残される。各球に対して膨張処理および合体処理が適用される。1又は複数の球から中間的に生じるオブジェクトの形状が注目組織の形状に一致するまでそのような処理が繰り返し実行される。その結果、各注目組織を模擬した模擬図形が生成される。それに対して三次元画像処理および計測が適用される。
(もっと読む)
画像処理装置および方法
【課題】 仮想視点映像に含まれる複数のフレームのそれぞれで使用する画像を撮影するカメラを自動的に適切に選択する。
【解決手段】仮想視点映像に含まれる複数のフレームの仮想視点情報を取得する取得手段と、前記複数のフレームのそれぞれについて、フレームの仮想視点情報と複数のカメラの視点情報との位置関係に基づき、前記複数のカメラからフレームの仮想視点の画像を生成する際に使用する画像を撮影するカメラを選択する選択手段と、前記複数のフレームのそれぞれについて選択されたカメラの再選択処理を行う再選択処理手段とを有する。
(もっと読む)
画像処理装置、X線撮影装置、画像表示方法、画像比較方法、および画像表示プログラム
【課題】複数の撮影画像45を表示して観察する際に、観察者が一部の撮影画像45や全部の撮影画像54に対して高い操作性で操作できるようにする。
【解決手段】記憶手段23から読み出して表示手段5に表示している撮影画像45に対して操作手段6により画像操作を許容し、リンクボタン59によりリンクが設定されていれば1つの撮影画像45に対して操作手段6によって画像操作された内容をリンク設定された他の撮影画像45にも同時に適用するステップS14を実行し、リンクボタン59によりリンクが設定されていなければ1つの撮影画像45に対して操作手段6によって画像操作された内容をその撮影画像45に対して適用して他の撮影画像45に適用しないステップS15を実行する。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】本発明は、被写体が黒い背景を持つため対応点が複数存在する場合や、前景の被写体に接近した一様な背景部分で対応点が複数存在する場合でも、奥行値の誤推定を防止することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、映像入力手段10と、近傍画素の画素値を出力する近傍画素値出力手段15と、近傍画素の奥行値を出力する近傍奥行値出力手段25と、対応画素差分値を演算する対応画素差分演算手段20と、最小差分値、平均差分値、最小差分値または平均差分値にペナルティを加えた値の何れかを選択差分値として決定する差分値決定手段30と、平滑化を行う平滑化手段50と、平滑化差分値が最小となる仮定奥行値を、基準映像の各画素の奥行値とする奥行値決定手段60とを備える。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
地形情報表示装置および表示方法
【課題】利用者による3次元地形モデルの標高情報の正当性の評価を補助することが可能な地形情報表示装置および方法を提供する。
【解決手段】本発明の地形情報表示装置は、評価対象の3次元地形モデルが示す領域をそれぞれ異なる方向から撮影した2つの撮影画像をその3次元地形モデル情報に基づいてそれぞれ正射変換した2つのオルソ画像を生成する。そして、2つのオルソ画像の全画素について各画素を中心とした予め定められた範囲の画素の画素値の分散を算出し、2つのオルソ画像の対応する画素対についての分散の差分絶対値に応じて色付けした差分画像を生成し、生成した差分画像と3次元地形モデル情報を画像で表したモデル画像を並べて表示する。
(もっと読む)
カーソルの表示方法およびカーソルの表示プログラム
【課題】二次元画像の奥行き方向における位置の把握や指示をすることができるカーソルを表示するカーソルの表示方法、およびカーソルの表示プログラムの提供を目的とする。
【解決手段】三次元座標上に分布するレーザ点群データ1を所定の視点位置により示した二次元画像内において移動操作自在に注目点を指示するカーソル2を表示するカーソルの表示方法であって、
前記二次元画像内の注目点の三次元座標上における対応位置を演算し、この対応位置を含み、視点位置方向に対して直交する所定の平面状図形領域3を前記対応位置を基準にして三次元座標上に定義し、
前記視点位置から平面状図形領域3内を通過する視野領域を平面状図形領域3を基準に分割し、いずれかの分割領域内に配置されたレーザ点群データ1を非表示処理してカーソルの表示方法を構成する。
(もっと読む)
自由視点画像生成装置
【課題】被写体が不動の物体に限定されず、しかも設置が容易で小型且つ安価な自由視点画像生成装置を提供する。
【解決手段】画像処理コンピュータ14により、左カメラCL および右カメラCR により直接撮像された一対の直接被写体画像GL および直接被写体画像GR と、二対の間接被写体画像GLML 、GRML および間接被写体画像GLMR 、GRMR と、それらの直接被写体画像および間接被写体画像から求められた奥行き値Zとに基づいて仮想視点画像GK が生成される。左カメラCL および右カメラCR の1回の撮像により、上記直接被写体画像および間接被写体画像が同時に得られることから被写体12が不動の物体に限定されず、しかも、左ミラーML および右ミラーMR から手前位置に一対の左カメラCL および右カメラCR を設置すればよいので、設置が容易で小型且つ安価な自由視点画像生成装置10が得られる。
(もっと読む)
261 - 280 / 1,504
[ Back to top ]