
Fターム[5C054CA04]の内容
閉回路テレビジョンシステム (47,623) | 線源 (1,941) | 電磁波 (1,826) | 可視光線 (1,325)
Fターム[5C054CA04]に分類される特許
41 - 60 / 1,325
遠隔地監視システム
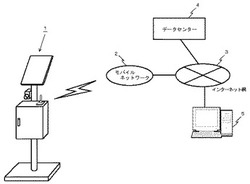
【課題】監視対象領域をカメラ装置により撮像し、撮像した画像データをデータセンターに蓄積することで通信ネットワークを介して遠隔地から閲覧可能にした遠隔地監視システムにおいて、監視の動作に影響を与えることなく省電力を図ることが可能なシステムを提供する。
【解決手段】遠隔地にある監視対象領域に自然エネルギー発電手段11を電源とするローカル監視装置1を設置し、このローカル監視装置1に備える撮像手段13と、撮像手段13により撮像した画像データを外部へ送出する通信手段18とに対する電力供給を間欠的に行い、撮像手段と通信手段とを一定時間毎に所定時間だけ作動させて電力供給が行われている間に監視動作を行う。また、画像データを蓄積するデータセンター4に監視対象領域に関するリアルタイム映像の閲覧要求を受け付ける機能を備え、必要に応じてローカル監視装置を連続動作させて監視対象領域の現在状況を確認可能にする。
(もっと読む)
車両室外撮像装置

【課題】記憶容量の増加を抑制可能な車両室外撮像装置等を提供する。
【解決手段】車両室外撮像装置は、車両の室の内部の人の所定の状況変化を検知する検知用マイク10、検知用カメラ20等の検知部と、車両の室の外部を連続的に撮像して一連の外部画像を生成する外部撮像部40と、人の所定の状況変化が検知部によって検知される場合、一連の外部画像のうちの一部を記憶する記憶部60と、を備える。車両室外撮像装置は、車両の室の内部を連続的に撮像して一連の内部画像を生成する内部撮像部70を備えることができる。この場合、記憶部60は、一連の内部画像のうちの一部も記憶することができる。
(もっと読む)
撮像方法
【課題】可視光を散乱させる微粒子が分散した気体又は液体の向こう側にある対象物を鮮明に撮像する。
【解決手段】屋内に、撮像対象の対象物Xがある。対象物Xは黒体放射する。対象物Xを遠赤外線を撮像できる赤外線カメラ1にて撮像する。照明光源4の手前にはフィルタ5があり、照明光源4からの照明光は遠赤外線が遮断される。対象物Xと赤外線カメラ1の間には霧状の水滴が存在する。この状態で赤外線カメラ1で撮像を行うと、対象物Xからの遠赤外線のみによって対象物Xが撮像されるので、得られる画像は鮮明である。
(もっと読む)
車載カメラの較正装置及び方法
【課題】較正指標を用いた車載カメラの較正を簡易な操作で実施可能な車載カメラの較正装置及び方法を提供する。
【解決手段】本発明に係る車載カメラの較正装置(100)は、較正指標(8)を撮像する撮像部(1)と、重畳表示する較正用マーカ(14)の表示位置を指示する指示手段(5)と、較正用マーカが指定された位置に重畳表示されるように画像処理する画像信号処理手段(3)とを備える。そして、較正用マーカ(14)が、較正指標(8)が有する2点に重なるように表示された場合の較正用マーカ(14)の表示位置に基づいて、車載カメラの取り付け角度を算出して較正を行う。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
車両周辺画像表示制御装置
【課題】実画像と履歴画像を合成して車両周辺画像をディスプレイに表示する車両周辺画像表示制御装置において、撮影画像の取得タイミングと車両移動量情報の取得タイミングが異なっている状況で、実画像と履歴画像のずれを従来よりも低減する。
【解決手段】車両周辺画像表示制御装置5は、時点t1において車両移動量情報を取得した場合、当該取得した車両移動量情報に基づいて、時点t1後に撮影画像を取得する予定の時点t11〜t13における車両移動量を推定し、時点t11〜t13のそれぞれにおいて撮影画像を取得すると、今回取得した撮影画像に基づく画像を実画像とし、また、時点t1に推定された現時点t11〜t13における予想移動量に基づいて、時点t11〜t13における車両と周囲の実際の位置関係に合致するよう、過去の撮影画像から履歴画像を作成し、この履歴画像を実画像と合成して表示する。
(もっと読む)
車両周辺監視装置
【課題】ステレオカメラにより距離を検出するための演算量を低減して、対象物の距離を精度良く検出することができる車両周辺監視装置を提供する。
【解決手段】車両1に搭載された左カメラ21,右カメラ22により撮像された同一対象物の画像部分の視差に基づいて、車両1と対象物との距離を検出するステレオ距離検出部12と、左カメラ21又は右カメラ22の撮像画像における対象物の画像部分の位置が、車両1からの距離が所定距離以下である範囲を想定して設定された特定画像領域内であるときに限定して、ステレオ距離検出部12により車両1と対象物間の距離を検出して、対象物の位置を追跡する対象物位置追跡部13とを備える。
(もっと読む)
運転支援装置
【課題】車載カメラを用いて障害物に対して通過が可能か等の視覚支援をドライバーに与えて運転支援を実現する。
【解決手段】車両15に設置された前方カメラ111の画像に消失線を重畳させて表示し、進行あるいは後行方向における障害物と車両15の接触に関する予測を可視化できるようにした。これにより、ドライバーは、降車による目視、確認作業が必要であるような車両と構造物距離が近く通り抜けが困難なシーンにおいても、車室内にて直視的に接触可能性を判断することが可能となる。
(もっと読む)
監視カメラ映像表示装置
【課題】 ある監視領域内の多数のカメラ映像の中から、適切な代表映像を選択的に表示することにより、ユーザの設定作業を不要にし、監視の効率を向上させる。
【解決手段】 複数の監視カメラの物理的な配置に基づいて前記監視カメラ同士の論理的な構成を示すカメラ管理構成を格納するカメラ管理構成データベースと、前記カメラ管理構成データベースに格納された前記カメラ管理構成に基づいて、前記監視カメラに評価値を与え、この評価値に従って、複数の監視カメラの中から表示対象とする監視カメラを代表カメラとして選出する代表カメラ選出部とを備える。
(もっと読む)
映像監視装置、映像監視方法およびプログラム
【課題】監視エリアを通過する移動体に対して画像認識処理を実行する際に、認識性能の低下を防ぐ。
【解決手段】映像監視装置10は、画像認識処理の対象となる認識処理領域の位置とカメラ設置位置とを取得し、前記認識処理領域の位置と前記カメラ設置位置との間の位置関係を算出し、その位置関係を示す前処理情報34を算出する前処理情報生成部23と、前記前処理情報34を参照して実測値と前記カメラ110によって撮影されたカメラ画像中の距離との比率に基づいて、画像認識処理に用いる認識パラメータ35(カメラ画像中の認識処理領域の座標)を算出する認識パラメータ演算部24と、前記認識パラメータ35を用いて認識処理領域を通過する監視対象に対して画像認識処理を実行する画像認識処理部25と、を備える。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】画像処理手段は、車両40の後部に設置された撮像手段1で撮像した車両後方周囲画像から車両40後方に対応する領域を切り出しこれから後方画像を生成するとともに、車両40後方の左右範囲に対応する領域とを各々切り出しこれらから右後方周囲画像と左後方周囲画像とを生成する。そして、後方画像を表示手段の下部に表示するとともに、右後方周囲画像と左後方周囲画像とを表示手段の上部に並べて表示する。その際、右後方周囲画像は表示手段の中央部から右側部へ向かうに従って表示領域が上下に広く表示されるよう生成されるとともに、左後方周囲画像は表示手段の中央部から左側部へ向かうに従って表示領域が上下に広く表示されるよう生成される。
(もっと読む)
信号機認識装置、候補点パターン送信装置、候補点パターン受信装置、信号機認識方法、及び候補点パターン受信方法
【課題】前方画像中における信号機の認識を高い精度と処理速度で実現する。
【解決手段】前方画像中で赤色点で認識される複数の信号候補点P1〜P5を検出し、そのうち赤色点の消灯とともに近傍位置での青色点の点灯が認識される信号確定点P2を検出し、これら信号確定点P2と複数の信号候補点P1,P3〜P5間の幾何的な配置関係を解析した候補点パターンデータを生成、記憶する。同じ交差点に対する同じ進入方向に対応してあらかじめ生成、記憶しておいた候補点パターンデータと、その時点で検出した信号候補点P1〜P5の集合に対して候補点パターンの配置と大きさを照合して当てはめることで、候補点パターンデータ中に設定された信号確定点P2に対応する信号候補点を、実際の信号機の表示位置を示す信号点として認識できる。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像処理装置、画像処理システム、カメラ及びカメラシステム
【課題】対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域ARMDに設定する領域設定部120と、画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて対象物の検出処理を行い、検出処理の結果に基づいて表示用画像データを生成する処理部とを含む。
(もっと読む)
画像処理装置、画像処理システム、カメラ、カメラシステム
【課題】表示画面内の対象物の存在を認識しやすい画像を提供し、危険予知を容易にすることができる画像処理装置、画像処理システム、カメラ、カメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域内での対象物を検出する画像処理を行うアラート表示領域と、画像領域内での対象物を検出する画像処理を行わないアラート非表示領域とを設定する領域設定部120と、アラート表示領域の赤外線画像データに基づいて、アラート表示領域における対象物の検出情報を含むアラート表示の画像処理を行ってアラート表示を含む表示用画像データを生成する処理部130とを含む。領域設定部120は、境界線を用いて画像領域を区画する設定パターンを決定し、境界線の位置及び形状のうちの少なくとも一つを定める。
(もっと読む)
監視システム
【課題】監視システムの動作状態に関する試験(動作試験)を自動的に実施する手段を提供し、実際に人を侵入させて行う試験を必要とせず、動作試験およびパラメータ調整の作業を自動化する。
【解決手段】別途擬似的に入力映像に物体が侵入したように見える合成映像を作成する。動作確認試験時は、PTZ撮像装置より得られた映像の代わりに疑似映像を物体検出装置に入力し、入力映像と擬似物体画像を合成した位置の座標情報と物体検出装置で検出した位置の座標情報を比較し、その結果により該物体検出装置の動作が正常かどうかを自動的に判別する。更に、試験を複数の画像処理パラメータの組み合わせで自動的に実施し、ユーザの要求に従って最適なパラメータを自動的に決定する。
(もっと読む)
画像表示方法および装置
【課題】蛍光画像などの特殊画像を表示する画像表示装置において、特殊画像における発光部分の被観察部における位置を正確に把握でき、かつ発光部分の階調などの情報を正確に表した画像を表示する。
【解決手段】可視光の被観察部への照射によってその被観察部から発せられた光に基づく可視画像と可視光とは異なる波長帯域の特殊光の被観察部への照射によってその被観察部から発せられた光に基づく特殊画像とを取得し、可視画像が有する画像情報のうちの一部の情報を抽出して抽出画像を生成し、その生成した抽出画像を特殊画像上に重ね合わせた重ね合せ画像を生成し、その生成した重ね合せ画像を表示する。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 駐車時に消費電力を抑制しつつ、車両の周囲の監視対象物の監視をすることが可能な車載カメラ制御装置等の提供。
【解決手段】 車載カメラ制御装置は、赤外線画像データと可視画像データを取得する画像取得部110と、走行モードと防犯モードとを含む複数の処理モードのうちのいずれかの処理モードを、使用処理モードとして設定するモード設定部130と、処理部120とを含む。処理部120は、使用処理モードとして走行モードが設定されている場合には、可視画像撮像部220を通常駆動状態に設定し、可視画像データと赤外線画像データとに基づいて、報知用データの生成処理を行い、使用処理モードとして防犯モードが設定されている場合には、可視画像撮像部220を、動作オフ状態又は通常駆動状態よりも消費電力が低い省電力状態に設定し、赤外線画像データに基づく監視対象物の検出処理を行う。
(もっと読む)
撮影装置
【課題】本発明は、撮影装置に関するもので、映された本人の満足度を高めることを目的とするものである。
【解決手段】この目的を達成するために本発明は、使用者16が玄関内側1で撮影装置4に内蔵された監視カメラ12の前に立つと、監視カメラ12近傍に取付けた監視対象物検出センサーによって投射器14が起動され、監視カメラ12によって撮影した映像が玄関内側1の床面15に投射される。そして、撮影ボタン19を押すことにより、床面15に投射される映像がサーバーに伝送され、サーバー側でアルバムの自動作成が行われる。
(もっと読む)
41 - 60 / 1,325
[ Back to top ]