
Fターム[5F031GA48]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームの支持部全体が水平方向に移動 (1,108)
Fターム[5F031GA48]に分類される特許
61 - 80 / 1,108
剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
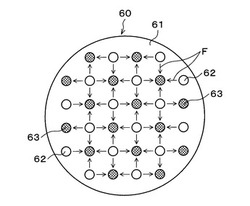
【課題】重合基板から剥離された被処理基板を適切に保持し、当該被処理基板の搬送又は処理を適切に行う。
【解決手段】剥離システムは、重合ウェハから剥離された被処理ウェハWを搬送又は処理する際に、当該被処理ウェハWを非接触状態で保持する保持部60を有している。保持部60の保持面61には、気体を噴出する複数の噴出口62と気体を吸引する複数の吸引口63とが形成されている。複数の噴出口62と複数の吸引口63は、保持部60に保持される被処理ウェハWに対応する位置全体に亘って形成されている。剥離システムにおいて、保持部60は、被処理ウェハWを搬送する搬送装置、被処理ウェハWの表裏面を反転する反転装置、重合ウェハを被処理ウェハWと支持ウェハに剥離する剥離装置、被処理ウェハWを洗浄する洗浄装置、被処理ウェハWを検査する検査装置に設けられている。
(もっと読む)
搬送ロボット

【課題】構成を簡素化し、かつ、十分な昇降範囲を確保できる搬送ロボットを提供すること。
【解決手段】搬送ロボット1の旋回台12は、基台11に鉛直軸O1回りに旋回可能に取り付けられた基部13から延伸部14が水平に一方向にのみ延伸する。延伸部14の先端部からは支柱21が鉛直方向に立設される。第1昇降用アーム24は、支柱21の先端部で水平軸回りに回転可能に支持され、第2昇降用アーム26は、第1昇降用アーム24の先端部で水平軸回りに回転可能に支持される。水平アームユニット30は、第2昇降用アーム26の先端部で水平軸回りに回転可能に支持される。水平アームユニット30は、被搬送対象物を載置するハンド部33aを支柱21に対して鉛直軸O1側で水平軸と平行な方向に移動させるアーム部32aを有し、水平アームユニット30のアーム部32aの一部が延伸部14の上面よりも低い位置で動作して被搬送対象物を搬送可能である。
(もっと読む)
露光ユニット及びそれを用いた露光方法
【課題】複数の基板の露光をより効率的に行うことができ、タクトタイムの短縮を図ることができる露光ユニット及びそれを用いた露光方法を提供する。
【解決手段】露光ユニット10は、マスクMを保持するマスクステージ21と、基板W1,W2をそれぞれ保持する第1及び第2のワークチャック22,23を備える基板ステージ24と、第1及び第2のワークチャック22,23に保持された基板W1,W2がマスクMと対向するように、第1及び第2のワークチャック22,23を同期して移動可能なステージ移動機構25と、マスクMを介して基板W1,W2に露光光を照射する照明光学系と、を備える露光装置11と、基板W1、W2をそれぞれ保持し、且つ、第1及び第2のワークチャック22,23に対して基板W1,W2を搬入及び搬出可能な第1及び第2の搬送装置12,13と、基板W1,W2の搬入及び搬出動作が同期して行われるように第1及び第2の搬送装置12,13を制御する制御部20と、を備える。
(もっと読む)
基板搬送容器の開閉装置、蓋体の開閉装置及び半導体製造装置
【課題】密閉型のFOUP1の蓋体3を開閉(着脱)するにあたり、蓋体3を着脱する蓋体開閉機構20に要する機構を少なく抑えながら、開閉領域S3とローディングエリアS2との間に設けられるシール部材56の摩耗を抑えること。
【解決手段】ローディングエリアS2側における搬送口5の開口端が斜め上方を向くように、側壁部4に筒状体5aを気密に接続する。そして、昇降基体22と共にカバー部材23を昇降自在に構成し、カバー部材23に回動体41を設けると共に、昇降基体22が下降する時に、カバー部材23が昇降基体22と共に下降しながら筒状体5aの開口面に対して垂直に移動するように、回動体41の案内される案内部61を設ける。この時、カバー部材23が筒状体5aに向かって移動する時に、当該ドア部材の姿勢を規制するために、カバー部材23と昇降基体22との間にガイド部26を各々設ける。
(もっと読む)
基板貼り合わせ装置
【課題】係合部が基板保持部材に係合できない。
【解決手段】基板貼り合わせ装置は、複数の基板を加圧して貼り合わせる複数の加圧室と、前記基板を保持する基板保持部材と、前記基板及び前記基板保持部材を前記複数の加圧室に搬送する搬送部と、前記複数の加圧室にそれぞれ設けられ、前記基板保持部材の係合部に係合される係合部材であって、前記基板保持部材が異なる複数の向きのいずれの向きで前記加圧室に搬入された場合も前記係合部に係合する係合部材とを備える。
(もっと読む)
基板搬送方法および基板搬送機
【課題】基板搬送機自体の位置決め調整の許容範囲を広げ、基板へのダメージ、パーティクルの発生、基板の搬送不良を防止することができる基板搬送方法および基板搬送機を提供する。
【解決手段】本基板搬送方法は、基板Wの周縁部を一対の支持アーム171で支持し、支持アーム171と基板Wの周端部との間に所定のクリアランスが形成された状態で、支持アーム171および基板Wを移動機構162,165により移動させる。支持アーム171で支持している基板Wを反転させることも可能である。
(もっと読む)
基板貼り合わせ装置
【課題】複数の装置に対する基板保持部材の向きが各装置によって異なる。
【解決手段】基板貼り合わせ装置は、複数の基板を加圧して貼り合わせる第一の加圧部及び第二の加圧部と、基板を保持する基板保持部材を第一の加圧部に搬送する第一の搬送部と、第一の搬送部から基板保持部材を受け取り、第二の加圧部に搬送する第二の搬送部と、第一の搬送部から第二の搬送部への基板保持部材の受け渡しにより、第二の搬送部によって第二の加圧部に搬入される基板保持部材の向きが第一の搬送部によって第一の加圧部に搬入される基板保持部材の向きと異なる場合に、基板保持部材の向きを調整する調整部と、を備える。
(もっと読む)
浮上搬送加熱装置
【課題】塗布膜に乾燥ムラを生じさせずに基板を加熱しながら搬送することができる浮上搬送加熱装置を提供する。
【解決手段】基板を超音波振動浮上させる振動板部2と、前記振動板部を加熱するヒータ部3と、前記振動板部に超音波振動を与える超音波発生部4と、基板の端部を支持して基板の浮上方向と垂直な方向に基板を搬送する搬送部5と、を備える浮上搬送加熱装置であって、ヒータ部3は、振動板部2の基板を浮上させる面の裏面側に振動板部2と所定間隔を設けて配置され、基板の搬送方向と直交する方向の振動板部2の寸法は同方向の基板Wの寸法よりも大きく、ヒータ部3により振動板部2が加熱されることにより、浮上搬送中の基板W全面が振動板部2によって加熱される。
(もっと読む)
半導体ウエハマウント方法および半導体ウエハマウント装置
【課題】収納容器内の搬出対象物を精度よく判別してリングフレームと半導体ウエハの両裏面にわたって支持用の粘着テープを貼り付けてマウントフレームを作成する。
【解決手段】ウエハ収納容器からワークを持ち上げて取り出し、表面側を第1識別センサで検出し、ワークがウエハまたはスペーサのいずれであるかを判別する。ワークがウエハの場合、当該表面における保護テープの有無も判別する。表面に保護テープが無い場合、さらにウエハ収納容器の外周近傍に配備された第2識別センサによってウエハ裏面を検出し、保護テープの有無を判別する。
(もっと読む)
セラミック配線基板個片の移載方法、およびその移載装置
【課題】ブレーク溝で切断した後、ピックアップテーブルの上面に移動され、大判の姿をなしている(大判状態で縦横に並ぶ)セラミック配線基板個片群から、基板個片ごとピックアップしてトレー等、別の位置に移載(移動)する場合に好適な、セラミック配線基板個片の移載方法を得る。
【解決手段】テーブル21の上面を、伸縮するシート31で覆っておき、このシート31の上面に、切断後、大判における配線基板部位の配列状態のままのセラミック配線基板個片群10を載置し、各基板個片11を吸着してピックアップする際、隣接する縦横の各基板個片11相互における切断面間に間隔Sができるように、シート31をテーブル21の上面に沿って引き伸ばしておく。シート31の上面に載置したとき、間隔がなかったとしても、この引き伸ばしにより、基板個片相11互間に間隔Sができるから、引っかかりのない円滑なピックアップができる。
(もっと読む)
剥離装置および剥離方法
【課題】簡単な構成で処理能力を向上できる剥離装置および剥離方法を提供すること。
【解決手段】
剥離装置1は、第1面W1が第1接着シートS1の一方の面に貼付されてフレーム部材としての第1リングフレームRL1に支持されるとともに、第2面W2が第2接着シートS2の一方の面に貼付された板状部材としてのウェハWから第1接着シートS1を剥離するものであり、第2接着シートS2の他方の面側に接する支持面21で第2接着シートS2を支持する第2シート支持手段2と、第2シート支持手段2をウェハWの第1面W1と平行な方向に移動可能な移動手段3と、第1接着シートS1にウェハWから離間する方向に剥離力を付与可能な剥離力付与手段5と、第1接着シートS1が剥離されたウェハWを回収する回収手段6と、を備えている。
(もっと読む)
基板処理装置
【課題】輸送時に基板搬送容器格納棚の分解を必要とせず、又再組立てを必要とせず、輸送コストを低減できると共に作業性の向上を図る基板処理装置を提供する。
【解決手段】複数枚の基板21が収納される基板搬送容器9と、該基板搬送容器を搬送する基板搬送容器搬送装置15と、該基板搬送容器搬送装置15により搬送された複数の基板搬送容器9が格納される基板搬送容器格納棚11とを具備し、該基板搬送容器格納棚11を高さ方向に伸縮可能とした。
(もっと読む)
物体の搬出方法、物体の交換方法、物体保持装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の搬出を迅速に行う。
【解決手段】 基板ホルダ30aには、基板Pの搬送に用いられる基板トレイ40aを収容するX溝31xが形成されている。また、X溝31x内には、基板トレイ40aを押圧して基板トレイ40aと共に基板Pを移動させる基板搬出装置70aが設けられている。このため、基板Pに対する露光処理が終了した後、基板Pの交換のために基板ステージ20aを基板交換位置に位置させる前に基板Pの搬出動作を開始することができる。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体及び基板処理システム
【課題】基板を露光処理する前に、各種の処理モジュールにより基板に各種の処理を行う際に基板に発生した塵埃が、露光装置の基板保持機構の接触部に付着することを防止できる基板処理方法を提供する。
【解決手段】回転可能に保持した基板に形成されている切欠部の回転角度位置が基準位置から所定範囲内になるように位置合わせする位置合わせ工程と、位置合わせされた基板を所定の処理を行う基板処理部23に搬送し、基板処理部23に設けられた第1の接触部82と接触させることによって基板を保持する第1の保持工程と、基板に所定の処理を行った後、基板を露光装置に搬送し、露光装置に設けられた第2の接触部と接触させることによって基板を保持する第2の保持工程とを有する。第1の接触部82は、回転角度位置が所定範囲内のとき、基板が第1の接触部82に接触する領域が、基板が第2の接触部に接触する領域と重ならないように設けられている。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、被処理基板の非接合面の酸化を抑制する。
【解決手段】剥離装置30は、加熱機構128を備え、且つ被処理ウェハWを保持する第1の保持部110と、加熱機構151を備え、且つ支持ウェハSを保持する第2の保持部111と、少なくとも第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構170と、第1の保持部110の外周部に沿って環状に設けられ、且つ複数の孔が形成され、被処理ウェハWを保持した第1の保持部110の外周部に対して不活性ガスを水平に供給するポーラスリング130と、を有している。第1の保持部110において被処理ウェハWを保持するポーラス121の保持面121aの径は、被処理ウェハWの径よりも小さい。
(もっと読む)
基板搬送方法、基板搬送装置、及び塗布現像装置
【課題】基板搬送装置のバキューム機構に用いられるパッドからの基板のずれを検出可能な基板搬送方法を提供する。
【解決手段】この基板搬送方法では、複数の載置部のうちの一の載置部の基板を保持部で受け取って保持し、保持部に保持される基板を一の載置部から搬出し、保持部に保持される基板の保持部に対する位置(第1の位置)を検出し、保持部に保持される基板を他の載置部に臨む場所まで搬送し、その場所において、保持部に保持される基板の保持部に対する位置(第2の位置)を検出し、第1の位置及び第2の位置に基づいて、搬送前後において生じた、基板の保持部に対する位置ずれ量を算出し、算出された位置ずれ量が所定の範囲に入るか否かを判定する。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
61 - 80 / 1,108
[ Back to top ]