
Fターム[5H004KC56]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 負荷変動に対するもの (25)
Fターム[5H004KC56]に分類される特許
1 - 20 / 25
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
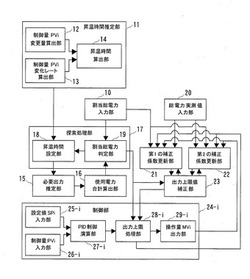
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
プラント制御装置及び蒸気使用プラントの制御方法
【課題】蒸気負荷における蒸気の需要量が変動しても、効率を低下させることなく、蒸気使用プラントの蒸気発生装置を運転できるプラント制御装置及び蒸気使用プラントの制御方法を提供することを課題とする。
【解決手段】ボイラ10と、ボイラ10で発生した蒸気を貯蔵する蒸気アキュムレータ30と、蒸気アキュムレータ30に貯蔵される蒸気が供給される蒸気負荷20と、を含んで構成される蒸気使用プラント1に備わり、蒸気負荷20における蒸気の予測需要量を予測するとともに予測需要量に基づいてボイラ10の運転パターンを決定し、運転パターンに基づいてボイラ10を運転するプラント制御装置100及び蒸気使用プラント1の制御方法とする。そして、予測需要量の蒸気が発生するボイラ10の負荷率が、予め設定される下限負荷率より低くなる時間帯でのボイラ10の運転時間が短くなるように、運転パターンを決定することを特徴とする。
(もっと読む)
制御システム、制御装置、および制御方法
【課題】個別VQC方式を用いた電力系統の電圧値が運用制約範囲の上限および下限の少なくとも一方を超えることを低減する。
【解決手段】個別VQC装置401は、検出された500kV母線101の電圧値を用いて、電力系統10における目的関数の最適解を決定する。個別VQC装置401は、最適解を用いて個別電圧無効電力制御を行なう。個別VQC装置401は、通信インターフェイスを用いて最適解を全系VQC装置301に送信する。目的関数は、電力系統10における電圧に関する運用制約の範囲内の中間値に対する、最適解の解候補に応じた電力系統10の電圧値についての偏差を示した項を加算項として含む。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
適応制御装置
【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
制御方法及び制御装置
【課題】モータを高効率に駆動するために好適な制御方法を提供すること。
【解決手段】印刷装置は、記録ヘッドを搭載したキャリッジを、主走査方向に往復運動させ、キャリッジの往復運動に合わせて、用紙を挟持するローラをLFモータにより駆動して、用紙を所定量ずつ送り出し、用紙に画像を形成する。この装置のLFモータ制御部35は、用紙位置y(t)を検出する位置検出部351と、LFモータへの操作量u(t)を算出する操作量演算部353と、操作量u(t)の演算に用いるパラメータθiを、用紙位置y(t)に基づき補正するパラメータ更新部355と、を備える。また、操作量演算部353は、最大速度V及び加速時間Tで定められる目標位置r(t)に基づき、操作量u(t)を算出する。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 負荷変動などの悪影響を抑制し、ロバストかつ目標指令に対して高速な追従性能を実現することができるサーボ制御装置とその制御方法を提供する。
【解決手段】 モデル位置制御部(72)と、第1モデル速度制御部(74)と、第2モデル速度制御部(76)と、モデルトルク指令により加速されモデル速度を生成するノミナルプラント(77)と、第2モデル速度の高域を遮断し第1モデル速度生成する第3ローパスフィルタ(78)と、第1モデル速度を積分してモデル位置を生成するモデル積分部(79)と、からなる規範モデル部(7)を備え、第1モデル速度指令と速度指令を加算して新たな速度指令を生成し、第1トルク指令とモデルトルク指令を加算して新たな第1トルク指令を生成し、モデル位置を第1位置指令とする。
(もっと読む)
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法は、プロセス制御システム(100)において、1つ以上のアクチュエータ(114〜136)について1つ以上の設定点変更を決定するステップを含む。1つ以上の設定点変更を決定するステップは、第1動作モードで動作しているときは設定点変更を増大させるか又はその頻度を高めるステップと、第2モードで動作しているときには設定点変更を減少させるか又はその頻度を低めるステップとを含む。また、1つ以上の設定点変更を前記1つ以上のアクチュエータ(114〜126)に出力するステップも含む。更に、平半紙(108)が破断し、製紙機械(102)に掛け直した後に、第1モードに入るステップも含むことができる。また、(i)第1モードに入って以来指定の時間量が経過した後、又は(ii)第1モードに入り、平半紙(108)のキャリパ・プロファイルが、所望のキャリパ・プロファイルの指定閾値以内となった後に、第2モードに入るステップを含むことができる。 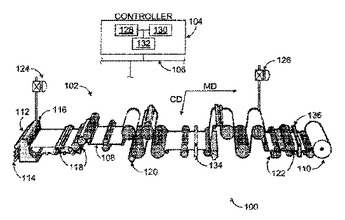 (もっと読む)
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
PID制御装置および制御パラメータ更新方法
【課題】PID制御のための制御パラメータとして、個々に最適な値を設定すること。
【解決手段】PID制御装置1の生成手段42は、所定の周波数で変化する信号あるいはデータを生成する。加算手段43は、生成手段42が生成した信号あるいはデータを、目標値に基づくPID制御信号あるいはPID制御データに加算し、PID制御対象21などへ供給する。更新手段41は、PID制御対象21などによる動作の検出信号あるいはデータに含まれる、所定の周波数で変化する信号あるいはデータに基づく変化量に応じてPID制御信号を生成するための制御パラメータ36を更新する。
(もっと読む)
電動機制御装置およびその機械特性測定方法並びに制御器調整方法
【課題】機械特性を測定して制御器の安定度を把握し、機械特性に合わせて制御器を最適に調整可能な電動機制御装置および機械特性測定方法、制御器調整方法を提供する。
【解決手段】 電動機1または機械5の動作量を検出する検出手段2と、指令信号を発生する指令器4と、指令信号を受けて電動機1を駆動するための制御器3と、電流制御部6と、を備えた電動機制御装置において、外乱入力する指令を生成する外乱信号発生部7と、制御器3が出力する駆動力を検出する駆動力検出手段8と、閉ループ外乱周波数応答特性を算出する閉ループ外乱周波数応答特性算出手段10と、該外乱信号発生部7の出力と駆動力検出手段8の出力から閉ループ駆動力周波数応答特性を算出する閉ループ駆動力周波数応答特性算出手段11と、該閉ループ駆動力周波数応答特性と該閉ループ外乱周波数応答特性から、機械特性を算出する機械特性算出手段13と、を備えている。
(もっと読む)
1 - 20 / 25
[ Back to top ]