
Fターム[5H115PA01]の内容
車両の電気的な推進・制動 (204,712) | 目的 (11,912) | 乗り心地改善 (2,285)
Fターム[5H115PA01]の下位に属するFターム
ノッチの切換回数減少 (6)
Fターム[5H115PA01]に分類される特許
61 - 80 / 2,279
ハイブリッド車両のエンジン始動制御装置
【課題】第1クラッチの締結によるトルク変動に伴うショックを感じにくくする。
【解決手段】エンジンとモータとを駆動源として備え、エンジンとモータとが伝達トルク容量を変更可能な第1クラッチを介して連結され、エンジンを始動する際には第1クラッチを締結してモータの駆動力によりエンジンのクランキングを実施する。また、アクセル操作の結果により停止中のエンジンを始動する第1始動モードと、アクセル操作以外の要因で停止中のエンジンを始動する第2始動モードと、を有している。そして、エンジンのクランキング中の第1クラッチの伝達トルク容量を、第1始動モードに比べて、第2始動モードの方が相対的に低くなるよう設定する。
(もっと読む)
ハイブリッド車両のモード切り替え時モータ回転数制御装置

【課題】油温や電源温度にかかわらず、モード切り替え時のモータトルク制御変化と第2クラッチトルク容量制御変化とを調時させて、空吹けやエンジンストールを防止する。
【解決手段】油温が設定温度未満の低油温時や、バッテリ温度が設定温度未満の電源低温時は、電気(EV)走行モードまたはハイブリッドHV走行モードの間に、EVモードおよびHEVモード間のWSCモードで行うモータ回転数制御で用いる目標モータ回転数として、低油温時用目標モータ回転数または電源低温時用目標モータ回転数をWSCモータ回転数制御マップにセットして学習する(S16,S18)。WSCモードである間に、S16またはS18で学習した低油温時用目標モータ回転数または電源低温時用目標モータ回転数に基づき、モータの回転数制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】急減速時にエンストを防止するハイブリッド車両の制御装置を提供する。
【解決手段】エンジン又はモータジェネレータが出力する回転を自動変速機によって変速して出力することにより走行し、モータジェネレータを発電機として動作させてバッテリに蓄電可能なハイブリッド車両において、エンジン及びモータジェネレータの動作を制御する制御装置であって、自動変速機は、第1及び第2の摩擦要素の少なくとも一つの締結状態を変更することによって変速を実現し、ハイブリッド車両が急減速状態となったときに、急減速に伴って変速が行われるときに締結状態が変化する第1の摩擦要素とは異なる第2の摩擦要素を解放状態に制御する。
(もっと読む)
車両用発電制御装置
【課題】回生発電時に効率よく蓄電装置に充電しつつ、発電トルク変化によるドライバビリティの悪化を防止する.
【解決手段】蓄電装置12の推定充電率が目標充電率より低い場合には、蓄電装置の推定充電率が目標充電率となるよう発電機10の発電制御を行う通常発電制御手段と、車両の減速中でかつ内燃機関の燃料供給を停止している期間に、発電機の発電制御を行う回生発電制御手段とを備えた車両用発電制御装置において、車速に応じて減速時の回生発電における充電量を予測する回生時充電量予測手段を備え、回生時充電量予測手段で求めた回生時予測充電量の増加に伴って蓄電装置12の目標充電率を低下させるとともに、回生発電制御手段は、発電機において蓄電装置への充電有無で発電に必要となるトルクの差が所定トルク差以内となるよう発電量を減少する方向に制限する。
(もっと読む)
ハイブリッド車両の変速時モータ制御装置
【課題】ハイブリッド車両の変速中に変速機入力回転数を電動モータの回転数制御で所定通りに制御した後における電動モータのトルク制御への復帰をショック無しに行わせる。
【解決手段】回転数制御中、モータ回転数Nm(変速機入力回転数Ni)が変速後入力回転数に達するt4からt5までのC領域において、回転数制御中である電動モータのトルク上限値Tm(Lim)を、トルク制御から回転数制御への切り替え時t3の直前における目標モータトルクと同じ値に設定する。よってt5の前後間でモータトルクtTmの段差が大きくなることがなく、ショックの軽減が可能である。
(もっと読む)
車両の変速制御装置
【課題】自動変速機の変速過程のイナーシャフェーズにおける変速ショックの低減と応答性の向上との両立を図る。
【解決手段】モータを有する駆動源と駆動輪との間に有段式の自動変速機を介装する。この自動変速機による変速時には、摩擦締結要素の掛け替えを行うとともに、イナーシャフェーズでは、モータを目標回転数へ向けて回転数制御する。車速変化により変速が行われる第1変速パターンでは、変速ショックを低減するように、目標回転数の変化率を低く制限し(ステップS17,S19)、運転者のアクセル操作により変速が行われる第2変速パターンでは、応答性を重視して、第1変速パターンよりも目標変化率の変化率を高くする(ステップS18,S20,S21)。
(もっと読む)
ハイブリッド車両の駆動トルク制御装置
【課題】ギヤガタ詰め精度向上に好適なハイブリッド車両の駆動トルク制御装置を提供する。
【解決手段】アクセルペダル操作と車速に応じて設定される目標駆動トルクが負トルクから正トルクに切り変わる際に、変速機3から駆動車輪2までの伝達駆動系が負駆動状態から正駆動状態に切り替わるまでのギヤガタ詰め判定の間は、変速機3への入力トルクを目標駆動トルクよりも小さく、0トルクよりも大きい所定値(ギヤガタ詰めトルク)に制限する変速機入力トルク制限手段を備える。そして、変速機入力トルク制限手段は、ハイブリッド走行モードの場合は、エンジン1への要求トルクを目標駆動トルクが負トルクから正トルクに切り変わる際のエンジントルク指令値とエンジン燃焼下限トルクの大きい方の値に保持させて、前記所定値(ギヤガタ詰めトルク)との差分をモータジェネレータ5で補正する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動停止の頻度を低減することにより、乗員に与える違和感を低減する。
【解決手段】統合コントローラ10は、アクセル開度APOが予め設定されたエンジン停止判定値APO1以下であることをアクセルオフとして判定し、このアクセルオフの判定タイミングを起点としてエンジン停止開始タイミングを設定する。この場合、統合コントローラ10は、勾配路であると判定された場合に設定するエンジン停止開始タイミングを、勾配路でないと判定された場合に設定するエンジン停止開始タイミングよりも遅くしている。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】自動変速機の入力軸に動力伝達可能に連結された電動機を備える車両用動力伝達装置において、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフトの際にガタ打ちに伴うショックを抑制する。
【解決手段】車両10が被駆動状態であるときに変速機入力トルクTATを零に向かって制御する際にその変速機入力トルクTATが零に近づくに伴って、車両状態に基づいて変速機入力トルク変化率が抑制されるので、ガタ打ちに伴う振動が抑制される。また、そのガタ打ちを起振源とするガタ打ち後の振動も抑制される。よって、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフト時において、ガタ打ちに伴うショック(すなわちガタ打ちショックやガタ打ち後の振動的なショック)や歯打ち音が抑制される。
(もっと読む)
電気自動車駆動方式。
【課題】電気自動車の駆動方式に於いて、デフギアーを使用せず、左右独立した動力源をモータにて車輪に駆動力を伝達し、安定走行、経済性、かつ環境適合を目指す電気自動車の左右独立駆動方式。
【解決手段】左右に独立して設けた駆動用のモータ1の駆動力は、該モータ1に取付けたタイミングプーリー3(モータ1用)より、タイミングベルト4を介し、左右のドライブシャフト6に取付けたタイミングプーリー5(ドライブシャフト6用)に伝わり、前記左右のドライブシャフト6が駆動し、該左右のドライブシャフト6に連結した車輪2に駆動力が伝達され、車輛は駆動する事が出来る。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
ハイブリッド車両の制御装置及び制御方法
【課題】蓄電器が要求された出力を出せないために発電出力の増加が求められる場合であっても、要求出力に対する内燃機関の追従性を担保できるハイブリッド車両の制御装置を提供する。
【解決手段】内燃機関及び当該内燃機関の運転により発電する発電機を有する発電部と、車両の駆動源である電動機に電力供給する蓄電部と、蓄電部及び発電機の少なくとも一方からの電力供給により駆動する駆動部とを備えた車両の制御装置は、AP開度及び電動部の状態に応じて、駆動部に要求された出力を導出した後、駆動部に要求された出力に対応する出力を発電部が出力できず、かつ、駆動部に要求された出力と発電部の出力の差分である蓄電部必要出力を蓄電部が出力できないと判断したとき、駆動部に要求された出力と蓄電部が可能な出力の差分である補正発電部出力、及び蓄電部必要出力と蓄電器が可能な出力の差分である蓄電部出力制限量に応じた、内燃機関の燃焼制御に係るパラメータを導出する。
(もっと読む)
走行モード制御装置、ハイブリッド自動車、および走行モード制御方法、並びにプログラム
【課題】ハイブリッド自動車の運転感覚を運転者の好みに応じて適切に変更すること。
【解決手段】第1のシフトスケジュールが選択されたときは、電動機による走行時間がエンジンによる走行時間を上回るように制御して第1のシフトスケジュールを実行し、第2のシフトスケジュールが選択されたときには、エンジンによる走行時間が電動機による走行時間を下回らないように制御して第2のシフトスケジュールを実行する走行モード制御部を有するハイブリッド自動車を構成する。
(もっと読む)
走行制御装置および該装置を備えたフォークリフト
【課題】走行抵抗に影響されることなく加速度を一定に保つことができ、さらに、登坂時において、走行速度を制御することができる走行制御装置を提供する。
【解決手段】アクセル操作および前後進切り替え操作に応じて決定された目標速度で走行させる走行制御装置10であって、走行速度と目標速度との偏差から第1トルク指令値を算出する第1トルク指令値算出手段11と、車両の加速度と正の加速度制限値との偏差から第2トルク指令値を算出する第2トルク指令値算出手段12と、車両の加速度と負の加速度制限値との偏差から第3トルク指令値を算出する第3トルク指令値算出手段13と、第1〜3トルク指令値を比較してトルク指令値を決定するトルク指令値決定手段14と、を備えたことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行モードの切り替えを適切に実施し、運転性を向上させる。
【解決手段】動力源としてのエンジン及びモータジェネレータと、電力源としてのバッテリと、を備えるハイブリッド車両の制御装置であって、アクセル操作量に基づいてアクセル操作速度を算出するアクセル操作速度算出手段(S7)と、アクセル操作量に遅れ処理を施した補正アクセル操作量を算出する補正アクセル操作量算出手段(S7)と、少なくとも蓄電量及び補正アクセル操作量に基づいて、EVモード、又は、HEVモードへの移行を要求する走行モード移行要求手段(S10)と、EVモードへの移行要求があったときに、アクセル操作速度がアクセルペダル踏み込み中と判定できる正のEVモード移行禁止速度よりも大きいときは、EVモードへの移行を禁止するEVモード移行禁止手段(S11)と、を備えることを特徴とする。
(もっと読む)
全方向移動型電動車両およびその制御方向
【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
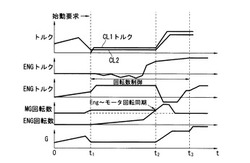
ハイブリッド車両の制御装置
【課題】 エンジン始動前に電気走行モードからハイブリッド走行モードへのモード切り替え要求がキャンセルされた際の排気および運転性の悪化を抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】 統合コントローラ20は、EVモードからHEV走行モードへのモード切り替え要求に伴うエンジン始動要求がなされた後、エンジン始動前に当該モード切り替え要求がキャンセルされた場合、既にエンジン回転数Neが上昇を開始しているとき、すなわちエンジン1がクランキング中であるときには、エンジン始動後にエンジン1を停止させる。
(もっと読む)
61 - 80 / 2,279
[ Back to top ]