
Fターム[5H180AA05]の内容
Fターム[5H180AA05]に分類される特許
101 - 120 / 177
運行状況記憶装置および閾値設定方法
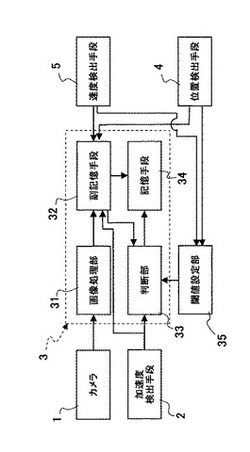
【課題】重要度の高い画像データを選別して記憶装置に記憶させることが可能な運行状況記憶装置および画像データ記憶方法を提供することである。
【解決手段】運行状況記憶装置は、車両Vに設置されるカメラ1と、車両Vの加速度Gx,Gyを検出する加速度検出手段2と、検出される加速度Gx,Gyの絶対値が閾値α,βを超えることを条件として上記カメラ1が上記条件を満たした時刻に撮影した画像データを含む画像データを記憶する記憶手段34とを備え、車両Vの位置を検出する位置検出手段4と、車両の位置に基づいて地理条件を判断する地理条件判断手段35とを備え、上記閾値は地理条件に基づいて設定される。
(もっと読む)
移動通信端末、車両用歩行者検知システム

【課題】車両との衝突の対象となりそうな歩行者の情報を車両側に好適に報知して、運転者に歩行者の警戒を必要以上に行わせることなく、移動通信端末の携帯者との衝突を防止すること。
【解決手段】移動通信端末20は、一定距離範囲内の車両300に警戒信号を発して自端末の存在を知らせる。移動通信端末20は、制御信号送信装置40から送信される制御信号の受信レベルを閾値判定することによって、移動通信端末20の現在位置が、予め設定された送信不要エリア400内外にいることを判定する。移動通信端末20は、送信不要エリア400の内外の判定によって、警戒信号の発信又は発信停止を行うため、送信不要なエリアに存在する場合の不必要な警戒信号の送信がなくなり、警戒信号を受ける車両側に、実際に衝突する可能性がある歩行者のみ知らせて警戒させることができる。
(もっと読む)
運転支援装置
【課題】 夜間に車両を走行させている状況下で歩行者の検出をより安定して行うことができる運転支援装置の提供。
【解決手段】 道路を含む車両の周囲を撮像する撮像手段によって得られた撮像画像に対して、車両の振動量に応じた補正処理を施し(S103)、その補正後の撮像画像から、道路に相当する道路領域を検出し(S104)、その撮像画像から検出された歩行者候補と、検出された道路領域との位置関係に基づいて、前記検出された歩行者候補が歩行者であるか否かを判定する(S107及びS108)。
(もっと読む)
運行状況記憶装置
【課題】重要度の高い画像データ等を確実に保存しておくことが可能な運行状況記憶装置を提供することである。
【解決手段】車両Vに設置されるカメラ1と、車両Vの加速度を検出する加速度検出手段2と、カメラ1が撮影した画像データを常時記憶する記憶手段32と、検出される加速度が所定の条件を満たすと記憶手段32に記憶された画像データを不揮発性の記憶媒体5に記憶させる運行状況記憶装置において、不揮発性の副記憶媒体7を備え、記憶媒体5に画像データを記憶させることができない状況では、加速度データが条件を満たした時の画像データを含む画像データを副記憶媒体7に記憶させることを特徴とする。
(もっと読む)
運転支援装置
【課題】 夜間に車両を走行させている状況下で歩行者の検出をより安定して行うことができる運転支援装置の提供。
【解決手段】 道路を含む車両の周囲を撮像する撮像手段によって得られた撮像画像に対して、車両の振動量に応じた補正処理を施し(S103)、その補正後の撮像画像から、道路に相当する道路領域を検出し(S104)、その撮像画像から検出された歩行者候補と、検出された道路領域との位置関係に基づいて、前記検出された歩行者候補が歩行者であるか否かを判定する(S107及びS108)。
(もっと読む)
交通量計測方法および交通量計測装置
【課題】道路を通行する車両をカメラで撮影して得た画像を解析して交通量を計測する交通量計測装置において、並走車両が重なって撮影された場合や、夜間の車両にヘッドライトと紛らわしい発光体が存在する場合であっても、交通量を正確に計数する。
【解決手段】処理部12はカメラ11の撮影した画像上で、車両の特定箇所(昼間は車両の前端部、夜は一対のヘッドライト)が存在する位置(基点)を検出する。そして、この基点に対応する実世界での位置に特定箇所が位置するようにして道路に沿って配置された所定の標準車両をカメラ11から見た場合の3次元形状を算出し、該3次元形状を先の画像上に重ね合わせる。画像上でこの3次元形状に覆われた範囲に1台の車両が存在すると判定し、該3次元形状の外側を対象に別の車両の有無を判定する。
(もっと読む)
駐輪装置
【課題】設置を容易とするとともに、盗難を防止することができる駐輪装置を提供する。
【解決手段】駐輪した自転車を乗り出す際には、駐輪装置の利用料金を硬化投入口へ投入した後、駐輪時にロック機構付き精算機より抜き取ったロック解除鍵を鍵挿入穴に挿入するとともに、ロック解除鍵を解錠方向に回して解錠操作を行うと(SB2)、ロック板表示に「解除」が表示される(SB3)。このとき、ロック解除鍵による解錠操作によってロック機構のロック板の回動が自在となり、ロック板による車輪の拘束状態が解除されるため、自転車の乗り出しが可能となる。
(もっと読む)
障害物認識装置
【課題】より誤検出を少なくして障害物を認識できる障害物認識装置を提供する。
【解決手段】走行支援システム1はECU10からなり、ECU10は、ナビゲーションシステム12、前方ミリ波レーダ30等が接続された物体検出部100を備える。道路種別認識部110が、ナビゲーションシステム12の測定結果から自車の走行している道路を自動車専用道路であると認識したときは、レーダ波検出部102は前方ミリ波レーダ30及び近距離ミリ波レーダ32の反射率が通常の第1閾値より高い第2閾値以上のときに物体を障害物として抽出する。そのため、自車200が自動車専用道路を走行しており、歩行者がいる可能性が低い場合には、マンホール等の路面クラッターを障害物であると検出してしまう等の誤検出を少なくして障害物を認識できる。
(もっと読む)
自動二輪車用ナビゲーションシステム
【課題】
自動二輪車用のナビゲーションシステムを提供することを目的とする。
【解決手段】
自車位置を測位して自動二輪車の、目的地までの進行方向を算出するナビゲーション装置と、運転者が装着するヘルメットのバイザー部分に、ナビゲーション装置で算出した進行方向を含むナビゲーションに関する情報を表示するバイザー表示装置と、自動二輪車の速度を検出する速度検出装置と、ナビゲーション装置で算出した進行方向を、振動によって運転者に伝える振動装置と、を有しており、速度検出装置において、一定以上の速度を検出した場合に、バイザー表示装置での表示を行わない、または縮小して表示をする表示制御をナビゲーション装置で行う、自動二輪車用ナビゲーションシステムである。
(もっと読む)
駐車装置
【課題】駐車スペースを有するユーザーが、自分で使用しない時間帯に不特定多数のドライバーに駐車場を提供して、駐車スペースを有効に利用する。ドライバーが、予約などの手間をかけずに、現場で駐車場の空き状況を確認して利用できるようにする。不特定多数のドライバーに駐車させる時間帯が変化しても、通信回線を使用して遠隔地から変更する。
【解決手段】駐車装置は、車両の駐車スペース1に駐車する車両の出入りを阻止するロック機構2と、このロック機構2を制御する料金支払い機構3と、駐車スペース1の駐車可能時間を表示する駐車時間表示機構4と、駐車時間表示機構4に接続されて、駐車時間表示機構4が表示している駐車可能時間以外の時間帯に駐車スペース1に進入する車を検出して、警報信号を出力する警報機構5と、前記駐車時間表示機構4が表示する駐車可能時間を通信回線を使用して遠隔地から変更する遠隔変更機構6とを備える。
(もっと読む)
車システム
【課題】後続二輪車などの死角に位置する車両等を確認可能として安全な運転を可能とするとともに、システムの低コスト化を図る。
【解決手段】人間熱感知センサで後続二輪車を検知すると自動的にカメラが該二輪車を撮影しモニタ画面に表示する。同時に警告音声やブザーなどにより二輪車接近を運転者に報知するとともにブレーキを作動させる。モニタ画面はカーナビゲーション用に設けられた物をそのまま流用しセンサの追加とプログラミング変更のみで実施する。
(もっと読む)
車種判別プログラムおよび車種判別装置
【課題】撮影機器の設置条件に関わらず、精度よく車種を判別することができる車種判別プログラムおよび車種判別装置を提供すること。
【解決手段】車種判別装置100は、認識対象の画像から車両部分を抽出する車両部分抽出部112と、車両部分抽出部112により抽出された車両部分においてボンネットに相当する領域を認識するボンネット認識部114と、ボンネット認識部114によって認識されたボンネット領域の側面の傾きの大きさに基づいて車種を判別する車種判別部113とを備える。
(もっと読む)
オートバイの安全運行管理システム及び安全運行管理方法
【課題】オートバイの運動特性を考慮しつつ、無謀運転の把握、安全運転の指導、事故状況等の分析を行って、適切かつ確実に安全運行管理を行う。
【解決手段】車体に加わる衝撃に関する情報、車体の現在位置に関する情報、及び運転操作機器の操作に関する情報を取得し(S1)、これらの情報に基づいて車体の運行状況を判断し(S2)、車体の運行状況が予め定めた安全運行基準の範囲を逸脱した場合に警報を発生する(S3,S4)。安全運行基準は、天候、時刻、運転者の運転技量等の運転環境に応じて設定することができる。また、ドライバの現在の作業状況に関する情報を取得し(S5)、車体の現在位置に関する情報を参照してオートバイの運行日報を自動作成する(S6)。
(もっと読む)
車両判別システム
【課題】本発明では、確実に自転車とバイクを判別でき、既存の駐車場に簡単に安価で設置可能な車両判別システムを提供する。
【解決手段】ビームA,B,C,D,Eを投光する車両検知装置1と、車両検知装置1からの検知信号に基づいてビームA,B,C,D,Eを遮った車両を判別する車両判別装置2とからなる車両判別システムにおいて、車両判別装置2は、前記車両の進行に伴って移動する車輪により前記ビームが遮光されるのに対応して車両検知装置1から出力される検知信号により表される前記第1〜第5のビームの遮光の状態及び変化に基づいて、車両が自転車かバイクかを判別することにより、上記課題の解決を図る。
(もっと読む)
道路料金支払システムおよび携帯電話と携帯電話用制御プログラムならびに道路料金支払方法
【課題】 自動二輪車にも車載器を容易に設置することができ、認証装置を盗難あるいは紛失した場合でも不正使用を抑制することのできる道路料金支払システムを提供する。
【解決手段】 車載器3に車両情報とコードを記憶させる一方、近接無線通信機能を有する携帯電話2にはETCカード情報とコードを記憶させ、ゲートの通過時に行われる携帯電話2と車載器3との間の通信で両者のコードの一致不一致を確認し、一致した場合に限り、車載器3から携帯電話2に車両情報を送信し、携帯電話2側で車両情報とETCカード情報からなる料金決済情報を生成してゲート装置4に送信する。ゲート装置4との間の通信に携帯電話2の送受信機能を利用することで車載器3を小型化し、機器の設置スペースが十分でない自動二輪車にも容易に車載器3を設置できるようにする。
(もっと読む)
映像記録システムおよび映像記録装置
【課題】車両事故発生時の状況を効率的かつ確実に記録する技術を提供する。
【解決手段】映像記録システム100は、ハンドル3、サドル2、ペダル8のいずれかへの荷重が検知されてから、記録装置1への映像データの上書き記録を継続する。この後、ハンドル3、サドル2、ペダル8への荷重がいずれも検知されなくなった場合は、所定時間が経過するまで映像データを上書き記録したあと、記録を停止する。例えば運転者が自転車を降りてハンドル3のみ握って歩行したりサドル2に手をかけたりペダル8に足をかけている最中に事故にあっても、その事故発生前後の映像を的確に、しかも大容量を必要とせず効率的に記録できる。また、記録装置1は衝撃に強いから、せっかく記録した映像が事故によって消失する可能性が低い。
(もっと読む)
物体検出方法および物体検出装置
【課題】車両以外の物体の検出を高い精度で行うことが可能な物体検出方法および物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2から画像情報と距離情報を入力して物体を検出するコントロールユニットCUが、検出対象物体との距離と、画像情報から算出したエッジの方向ベクトル、エッジの方向ベクトル分散、エッジ強度、エッジ強度分散のうちの少なくとも1つと、に基づいて対象物の種類を判定する物体種類判定処理を行うようにした。
(もっと読む)
車載用レーダ装置
【課題】車輌の走行状況に応じてレーダの照射方向を適切に変更可能な車載用レーダ装置を提供する。
【解決手段】車速センサ14からの車速Vから捕捉距離dを算出し、捕捉距離dと車輌の旋回半径Rとからレーダの走査の角度θを計算する。レーダ16において角度θの方向に基いて照射方向を走査する。2輪車の場合、傾斜センサ18からの傾斜角度ψと車速Vとから旋回半径Rを算出する。
(もっと読む)
画像認識装置
【課題】 自転車や二輪車およびそれらの乗員と歩行者との判別精度を向上させた画像認識装置を提供する。
【解決手段】 カメラで取得した画像Im(t1)(ステップS1)と過去画像Im(t2)(ステップS3)から、オプティカルフローを算出する等して対象物の移動速度を求める(ステップS7〜S23)。求めた対象物の移動速度に応じて認識辞書を設定し(ステップS25)、設定した認識辞書を用いてパターンマッチングを行うことで物体認識を行う(ステップS27)。このため、速度領域の異なる対象物と誤認識するケースを効果的に抑制できる。
(もっと読む)
最後にドッキングしていた位置を記憶して利用するためのナビゲーションデバイスおよび方法
ナビゲーションデバイスが最後に車両に接続されていた位置、および/または、車両と切断された位置を記憶して利用するための方法およびデバイスを開示する。一実施形態において、方法は、ナビゲーションデバイスが最後に車両に接続されていた位置を記憶することと、ナビゲーションデバイスの現在位置とナビゲーションデバイスが最後に車両に接続されていた記憶位置とに基づいて車両へのルートを判断することとを含む。別の実施形態では、方法は、ナビゲーションデバイスが車両と切断された時点におけるナビゲーションデバイスの位置を記憶することと、ナビゲーションデバイスの現在位置とナビゲーションデバイスが車両と切断された記憶位置とに基づいて車両へのルートを判断することとを含む。  (もっと読む)
(もっと読む)
101 - 120 / 177
[ Back to top ]