
Fターム[5H180AA05]の内容
Fターム[5H180AA05]に分類される特許
161 - 177 / 177
運転判断支援装置、運転判断支援方法および車両
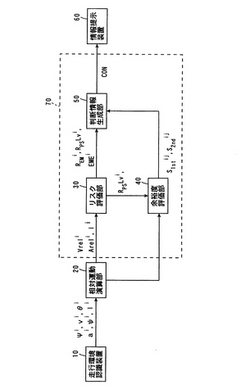
【課題】運転者がより現実の走行環境に即した運転を行いつつ走行環境に潜在する危険を予防および回避することが可能な運転判断支援装置、運転判断支援方法およびそれを備えた車両を提供することである。
【解決手段】走行環境認識装置10は車両状態を取得する。相対運動演算部20は各他車両と自車両との相対運動を算出する。リスク評価部30は各他車両について相対運動から顕在リスクおよび潜在リスクレベルを算出し、潜在リスクレベルが2以上の他車両については1次危険顕在化判定値を算出する。余裕度評価部40は潜在リスクレベルが2以上の他車両について自車両が取り得る動作の対1次危険余裕度および対2次危険余裕度を算出する。判断情報生成部50は各他車両についての顕在リスク、潜在リスクレベル、1次危険顕在化判定値、対1次危険余裕度および対2次危険余裕度を統合し、判断情報を生成する。情報提示装置60は運転者に判断情報の提示を行う。
(もっと読む)
車両走行状態解析システム、方法、プログラムを記録した記憶媒体及びプログラム

【課題】 GPSを利用して、走行中車両の走行データを取得し、解析し、表示する走行状態解析システム、方法、プログラムを記録した記憶媒体及びプログラムを提供する。
【解決手段】 車両に搭載した情報処理装置は、処理部と記憶部と表示部を備えるとともに、GPS受信機と接続し、前記処理部は、車両の走行中、走行計測区間を特定する地点が指定されると、この位置をGPS受信機から取得し、記憶部にこの地点を登録する一方、前記車両が前記走行計測区間を再度走行するときは、記憶部から前記の登録された地点の位置情報を参照し、車両が前記の登録地点を通過したか否かの判定に基づき、前記走行計測区間を走行中であると認められるとき、車両の現在位置をGPS受信機から所定の間隔で受信し、走行データを前記記憶部に書き込むことを特徴とする。
(もっと読む)
自動二輪車用の方向指示情報の表示方法およびカーブ情報の表示方法
【課題】 自動二輪車の走行支援を適切に行うための、自動二輪車用の方向指示情報の表示方法を提供すること。
【解決手段】 画像表示装置100を有する自動二輪車において当該画像表示装置100に方向指示情報を表示する方法である。方向指示情報は、画像表示装置100に方向指示マーク10を移動させることによってライダーに通知され、方向指示マーク10は、画像表示装置100の画面中央領域30を基準に、右および左の何れか一方へ順次流れるように移動する。
(もっと読む)
自動二輪車用の地図情報表示方法および走行情報表示方法
【課題】 自動二輪車のライダーにとってより適切な地図情報の表示方法を提供すること。
【解決手段】 画像表示装置100を有する自動二輪車における当該画像表示装置100に地図情報を表示する方法であって、自動二輪車の走行時において、地図情報は、線状の道路情報10のみからなる簡略化ナビゲーション表示50で画像表示装置100に表示される、自動二輪車用の地図情報表示方法である。
(もっと読む)
自動二輪車のナビゲーション装置
【課題】 走行中にナビゲーション装置の操作がしにくい点を解決することで、走行中にも楽な姿勢で操作することを可能にするとともに、ナビゲーション装置を車両に配置しにくい点を解決しすることで、ナビゲーション装置を容易に配置することを可能にする。
【解決手段】 目的地や現在の車両位置などナビゲーション情報を表示するナビゲーション表示部101と、このナビゲーション表示部101を制御する制御部103と、この制御部103に入力操作をする操作部102と、からなるナビゲーション装置を備えた自動二輪車10において、ナビゲーション表示部101から操作部102を分離するとともに、この操作部102を車体11側に配置した。
(もっと読む)
表示装置
【課題】 運転者が車両前方の道路の形状を把握し、また、前走車両の接近を瞬時に認識することが可能な表示装置を提供する。
【解決手段】 表示装置(ヘッドアップディスプレイ装置)は、表示手段(表示ユニット)1と、自車両前方の道路の形状を三次元的に示す道路形状画像と前走車両との間の望ましい車間距離を示す車間距離指標とを表示手段1に表示させる制御手段16と、を備えてなる。三次元データからなる地図情報を記憶する地図情報記憶手段(記憶媒体)14と、前記自車両の現在位置を検出する位置検出手段(GPS電波受信部)11と、を備え、制御手段16は、位置検出手段11により検出された前記自車両の現在位置に基づいて前記地図情報を読み出して表示手段1に前記道路形状画像を表示させてなる。
(もっと読む)
走行制御装置
【課題】二輪車が追い越した先々行車を対象に走行制御をする場合でも、運転者に違和感を与えることなく走行制御できる。
【解決手段】走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が減速中の場合には(ステップS5)、予め目標車間距離L*を長くし、さらにきびきびとした追従特性にする(前記ステップS6)。また、走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が加速中の場合には(ステップS7)、予め目標車間距離L*を長くし、さらに緩やかな追従特性にする(ステップS8)。
(もっと読む)
警戒対象検出装置及び警戒対象検出システム
【課題】 歩行者等を検出する場合に車両側における処理負荷を軽減する警戒対象検出装置及び警戒対象検出システムを提供することを課題とする。
【解決手段】 車両の周辺に存在する警戒対象を検出する警戒対象検出装置33であって、受信の指向性を制御可能であり、警戒対象が保持する発信装置から発せられた電波を受信する受信手段10A〜10E,11と、当該指向性が制御された受信手段10A〜10E,11で受信した電波により警戒対象の存在に関する情報を推定する推定手段37と、車両の走行状態を検出する走行状態検出手段12,13,34とを備え、走行状態検出手段12,13,34で検出した車両の走行状態に基づいて受信手段10A〜10E,11での指向性を制御することを特徴とする。
(もっと読む)
走行制御装置
【課題】先行車に追従する場合でも、自車両が必要以上に加減速しないようにできる。
【解決手段】走行制御装置は、自車両前方に先行車と先々行車とが存在しており(ステップS1、ステップS2)、その先行車が二輪車の場合において(ステップS3)、二輪車と先々行車との車間距離L1が距離L1d(Lmb)以下であり(ステップS8)、かつ自車両と二輪車との相対速度ΔVが相対速度ΔVd以上であり(ステップS9)、かつ道路幅方向において二輪車が先々行車の側面よりも外側にいるときには(ステップS10)、自車両と先々行車との車間距離である先々行車用車間距離L3が目標車間距離L*となるような走行制御にして、先々行車に追従するようにする。
(もっと読む)
配送支援システム、その方法、センタ装置、端末およびプログラム
【課題】 車両の状況を的確に把握して無駄なく安全、かつ迅速に荷物を配送することができる配送支援システム、その方法、センタ装置、端末およびプログラムを提供する。
【解決手段】 ユーザ端末10は、センタ装置20にネットワーク100を介して配送依頼に関する情報を登録し、センタ装置20は、車両端末30が備えられている車両の位置をGPS電波110および/またはネットワーク100を介して送信される位置情報から特定して、車両の作業状況情報を管理し、車両端末30は、目的地までの走行ルート、到着時間、配送依頼に関する情報を取得する。
(もっと読む)
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 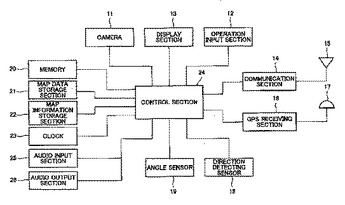 (もっと読む)
(もっと読む)
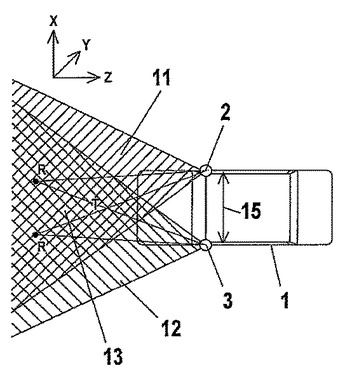
車両の走行および/または交通状況記録装置と記録評価方法
交通状況が(1)車両上の相互に一定距離(15)に準備される少なくとも2台の検知カメラ(2,3)によって記録可能である。これらの検知領域(11,12)は重複し、この手段によって、周辺状況の少なくとも1ヶ所の参照地点(R)および/または少なくとも1台の第2車両の認識地点による三角形(T)が、例えば、写真測量法によって形成可能である。事故の後、1台以上の車両の様子が再現可能である。三次元の一時的に繰り返される検知の方法によって、それぞれの空間上の位置とは別に、速度、速度方向、方向の変化、加速度、ならびに個別の車両の重心に関する本来的な回転も合わせた制動移動などのデータが、縮尺がかかった形で目に見えると同時に測定可能である。そして、これはすべて車両上に多数のセンサーをつけなくても可能である。車両(1)は周辺状況の3次元画像に投影も可能であるので、任意の視聴者の視点からの仮想表現が計算されて画面表示が可能である。
 (もっと読む)
(もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
自動二輪車用の走行支援方法および走行支援システム
【課題】 技量のあるライダーでもそうでないライダーであっても、適切な走行支援を実行できる自動二輪車用の走行支援方法を提供する。
【解決手段】 自動二輪車の走行情報を利用して走行を支援する方法であって、自動二輪車が所定のカーブを走行する際に(S10)、カーブの走行条件をライダーに通知する工程(S20)を包含し、前記カーブの走行条件として、予め記録しておいた走行情報に基づき算出され、ライダーの技量レベルに対応して変更可能な走行適正値と、実際の走行状態の値との対比結果が前記ライダーに通知される、自動二輪車用の走行支援方法である。
(もっと読む)
自動二輪車用の走行情報表示方法および走行情報表示システム
【課題】 バンク角等の走行条件を容易に把握することができる自動二輪車用の走行情報表示方法を提供する。
【解決手段】 自動二輪車のバンク角を取得する工程(S10)と、バンク角(152,154)を自動二輪車の走行コース150に沿って表示する工程(S20)とを包含する自動二輪車用の走行情報表示方法であり、工程(S20)において、バンク角(152,154)の度合いは、走行コース150から外れる度合いによって表示されることを特徴とする。
(もっと読む)
車両管理装置、車両管理方法、車両管理装置用プログラム、車両管理装置用記録媒体
【課題】車両電動アシスト付き自転車等の共同利用可能な車両を共同利用者に貸し出すにあたって、共同利用者の不正使用を防止することを目的とする。
【解決手段】自転車A1等に設けられた車輪のロック装置の開錠に使用されると共に、電波により情報の読み出し及び書き込みが可能な無線タグが内蔵された各自転車の専用鍵a1等を利用し、上記無線タグとの無線通信により、情報の読み出し及び書き込みが可能な無線タグ用リーダ・ライタb1等を設けた車両管理装置を利用することにより、共同利用者に対して専用鍵a1の貸出管理を行う。
(もっと読む)
交通制御システム
【課題】 交差点内での車両間の衝突事故を防止することのできる、交通制御システムを提供する。
【解決手段】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機3に測距装置4を設置し、交差点に進入する車両2に被測距装置5を搭載し、信号機3に設置した測距装置4が、交差点に接近した自車以外の車両2と信号機3との距離を測定し、交差点に自車以外の車両2が所定距離まで接近した場合、自車1に警告を発するものである。
(もっと読む)
161 - 177 / 177
[ Back to top ]