
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
5,401 - 5,420 / 5,473
旅行時間予測方法、装置及びプログラム
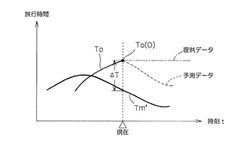
【課題】渋滞が発生して、旅行時間を予測しようとする道路区間の、当日の現在時刻までの旅行時間実測データが、同じ道路区間の過去の旅行時間統計データと大きく異なる場合であっても、過小評価のない予測を行う。
【解決手段】旅行時間を予測しようとする道路区間の、当日の現在時刻までの旅行時間実測データT0を収集し、前記道路区間について、当日と同じ交通条件の日の、過去に収集された旅行時間統計データTm′を取得し、当日の現在時刻の旅行時間実測データT0(0)と、前記旅行時間統計データTm′とに基づき、現在時刻以後の旅行時間予測データ(破線)を算出する。前記旅行時間実測データT0と、前記旅行時間統計データTm′との旅行時間の差が閾値よりも大きなとき(道路が混雑しているとき)、前記旅行時間統計データTm′が減少傾向にある時間帯では、前記算出された旅行時間予測データ(破線)と現在時刻の旅行時間実測データT0(0)との大きな方を現在時刻以後の旅行時間予測データとして提供する。
(もっと読む)
カメラキャリブレーション方法及びカメラキャリブレーション装置

【課題】カメラの画像座標がレーザレーダの探査座標に確実に整合して障害物の誤認識を確実に防止し得るように、カメラの画像座標を校正する。
【解決手段】自車1の旋回半径から自車1の直進走行状態を検出し、かつ、スキャン式レーザレーダ2の探査結果に基づく自車1と障害物との距離の時間変化及び自車速から障害物が静止状態であることを検出したときに、前記距離と前記自車速とにより自車1と障害物とのレーダ側の衝突予測時間を算出し、単眼カメラ3の撮影画像上の障害物の水平方向の時間変化から自車1と障害物との画像側の衝突予測時間を算出し、両衝突予測時間のずれからレーザレーダ2の探査座標に対する単眼カメラ3の画像座標の水平方向のずれを検出し、このずれが打ち消されて両衝突予測時間が一致するように単眼カメラ3の画像座標を校正する。
(もっと読む)
車両周辺監視装置
【課題】 本発明は、物標以外の物体の影響やノイズの影響を受け難く、良好な物標の認識精度を実現する車両周辺監視装置の提供を目的とする。
【解決手段】 本発明は、車両の所定位置に搭載された撮像手段の撮影画像に対して画像処理を行い、認識対象の静止物体を認識する車両周辺監視装置であって、車両の移動に伴って変化する認識物体の画素位置の移動方向を算出し、該移動方向の算出結果に基づいて、該認識物体が前記認識対象の静止物体であるか否かを判断することを特徴とする。
(もっと読む)
道路標識認識装置
【課題】 CPU、撮像装置の能力、コストを抑制し、車両へ現実的に搭載でき、確実に道路標識を認識することができる道路標識認識装置を提供すること。
【解決手段】 自車前方を撮像するステレオカメラ5と、撮像した画像を撮像対象までの距離を示す距離画像に変換する距離画像作成部21と、撮像した画像から道路標識部分を認識するデータ探索部42と、複数の道路標識のデータを有するテンプレートデータと、画像の道路標識部分とテンプレートデータとのマッチングを行い、道路標識を認識する画像判定部44とを備える道路標識認識装置1において、自車と道路標識との距離により段階的にテンプレートサイズを変更するテンプレート拡大縮小部44を設け、画像判定部44は、自車と道路標識との距離により段階的に認識処理を行う。
(もっと読む)
表示制御装置
【課題】鑑賞者の利便性を損なうことなく、消費電力を低減すること。
【解決手段】ナビゲーション装置10は、室内カメラ17によって撮影された画像に対する画像認識処理をおこない、鑑賞者(表示部12の鑑賞対象者である乗員)の視線方向を検出する画像認識処理部14bと、画像認識処理部14bによる鑑賞者の視線方向の検出結果に応じて「通常表示モード」および/または「節電表示モード」を切り替える表示モード切替部14dとを備える。
(もっと読む)
車両の走行車線認識装置
【課題】 車両が走行している車線を正確に特定可能にする。
【解決手段】 本発明の車両の走行車線認識装置1は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、車両の走行状況を検出する検出手段を備えると共に、車両の周囲の状態を認識する認識手段を備え、更に、検出手段により検出した走行状況及び認識手段により認識した周囲状態に基づき車両が走行する車線を特定する特定手段2を備えるように構成したものである。
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】ミリ波レーダ等の探査結果を利用することなく、撮像装置の自車前方の撮影画像から自車前方の衝突の可能性がある停止中の先行車等の静止状態の障害物を、自車の走行状態による誤認識が生じないようにして、確実に認識する。
【解決手段】自車1に搭載された単眼カメラ(撮像装置)3の自車前方の撮影画像の垂直エッジのヒストグラムを算出し、このヒストグラムのピーク点の軌跡のトラッキング画像を形成し、自車1の旋回半径から自車1の直進走行状態を検出したときに限り、前記ピーク点の軌跡の車幅方向の広がりの時間変化特性から衝突予測時間を算出し、この衝突予測時間に基づいて自車前方の衝突可能性がある静止状態の障害物を認識する。
(もっと読む)
車両の衝突を阻止する方法および装置
車両の衝突を阻止するための方法では、まず車両2の周囲状況と車両2の運動量がセンサ2.1,2.2,2.3,2.4,2.5によって検出される。これらのセンサの出力信号から優先交通違反度と衝突危険度が導出される。優先交通違反度と衝突危険度の組合せから危険段階が検出される。それぞれ検出された危険段階に依存して最終的に衝突危険性を低減するためのステップが開始される。 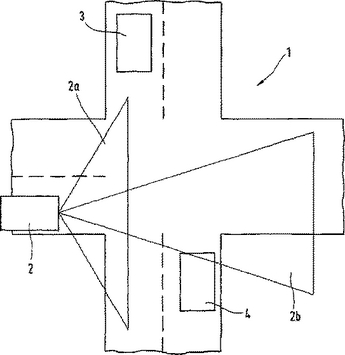 (もっと読む)
(もっと読む)
先行車両水しぶき認識装置
【課題】 前方の車両が水しぶき等を巻き上げて走行していることを確実に認識できる先行車両水しぶき認識装置を提供すること。
【解決手段】 自車の前方の画像を取り込むカメラ4及び画像メモリ2、画像取り込み部31と、画像の輝度分布から減色閾値を設定し、取り込んだ画像を4色の画像に減色する変換処理を行い、減色させた画像の段階的変化から自車前方の車両が水しぶきや、雪煙を巻き上げて走行していることを判断するプロセッサ3を備えた。
(もっと読む)
表示装置及び表示方法
【課題】地図上に映像画面を重畳表示する場合、他の情報と重なることなく、適切な大きさで配置された見易い表示画面を提供することである。
【解決手段】複数の映像画面の配置を行なう表示レイアウト決定部423と、配置を決定する際に用いるパラメータである映像重複度を管理する映像重複度管理部421と、映像重複度を計算する映像重複度計算部422を有し、映像重複度計算部422は、他の文字情報などと重複する映像画面を検出し、重複する場合は映像重複度管理部421を参照して映像重複度の合計を計算し、映像画面が他の情報と重複する程度を定量的に評価し、表示レイアウト決定部423は定量的に評価された映像重複度の合計に基づいて映像画面の再配置を行なう。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車周囲の状況変化を、必要に応じて運転者にわかりやすく報知する車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて自車両周囲のリスクポテンシャルを算出し、リスクポテンシャルに基づいてアクセルペダルの反力制御指令値を算出する。自車両の前方車両が検出されなくなると、その状況変化を運転者に報知する必要があるかを判定し、報知する必要がある場合にはアクセルペダル反力制御指令値が小さくなるように補正する。アクセルペダル反力により、自車両周囲のリスクポテンシャルを伝達するとともに、先行車が検出されなくなった場合に、必要に応じてアクセルペダル反力を減少して運転者に報知する。
(もっと読む)
ナビゲーションシステム
【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
(もっと読む)
鉄道軌道スキャニングシステムおよび方法
【課題】 精度および有効性のレベルの向上を改善した鉄道軌道上あるいは近傍の物体や異常を検出するためのシステムを提供する。
【解決手段】 鉄道軌道上あるいは近傍の物体や異常を検出するためのシステムは、鉄道軌道部上あるいは近傍をスキャンするためのスキャニング手段と、スキャニング手段からの情報に基づいて鉄道軌道部上あるいは近傍の物体あるいは異常の存在と位置を決定するための検出手段から成る。
(もっと読む)
移動体用表示システム及び移動体
本発明の移動体用表示システムは、同時に表示可能な第1速度表示領域と第2速度表示領域等の複数の表示速度領域を備え、上記複数の速度表示領域のうち所定の速度表示領域に速度を表示させるとともに、残りの表示領域に速度以外の情報を必要に応じて表示させる表示制御部を有している。これにより、速度の誤認を低減させることができるので、安全運転を行う上で重要な情報である速度の誤認を無くし、使用者による運転の安全性を向上させる移動体用表示システムを提供できる。 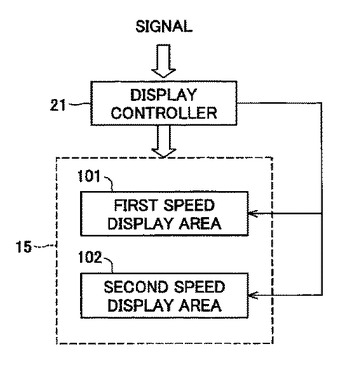 (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられており、監視される外部空間の走行路側方にそれぞれ1つずつ、早期注意線と車線マークを含む後期注意線とによって画された注意ゾーンが定義されている、車両用支援システムに関する。このシステムにはさらに監視ユニットからのデータを評価する評価ユニットが設けられており、本発明によれば、評価ユニットによって注意ゾーン内に定義された注意閾値を上回ったことが識別された場合、別のプランによるドライバーアダプティブ条件に依存して、音響・視覚・触覚警報またはステアリング介入のための注意信号が出力される。
これにより本発明の支援システムは、有利には、ドライバーの要求を取り入れていっそう快適な印象を与えることができ、公知の支援システムに比べて受容能力が高められ、経済性の高い製品となっている。 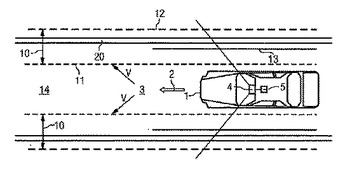 (もっと読む)
(もっと読む)
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 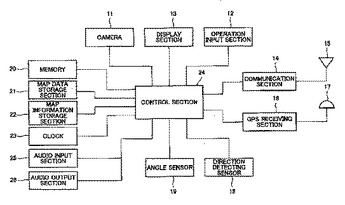 (もっと読む)
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 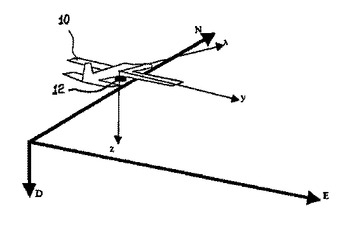 (もっと読む)
(もっと読む)
視覚障害者追跡システム及び視覚障害者検出方法
【解決手段】道路の対向位置にそれぞれカメラ2a,2bを設置して、その道路を渡る視覚障害者の追跡を行う。各カメラ2a,2bの視野は、互いに道路の対向側を監視し、かつ、道路の真中で重複した状態に設定されており、各カメラ2a,2bの画像処理部は、当該カメラに写った画像の中で、輝度の高い線分の検出を行い、前記線分が検出された場合に視覚障害者の白杖とみなし、当該視覚障害者の特徴情報に基づいて当該視覚障害者を追跡し、その追跡している視覚障害者の特徴情報を他のカメラの画像処理部に渡す。
【効果】道路をこちらに向かって渡って来る視覚障害者が白杖を持っていれば、それを正面から確実に検出できる。その視覚障害者の色、大きさなどの特徴情報を捉えて、当該視覚障害者を追跡することができる。当該視覚障害者が道路の半ばを越えてくると、その追跡している視覚障害者の特徴情報を他のカメラの画像処理部に渡すことにより、当該他のカメラは、白杖を検出できなくても、その特徴に基づいて当該視覚障害者を背後から、横断完了まで追跡し続けることができる。
(もっと読む)
車両用右左折支援装置
【課題】 交差点ごとにインフラ整備を行うことなく、車両に搭載したシステムのみにより右折先または左折先横断歩道上の歩行者との接触を防止する。
【解決手段】 撮像手段による撮像画像を処理して右折先の横断歩道を横断する歩行者の存在を検出するとともに、すれ違う対面車両の通過を待っている右折待ちの状態にあるか否かを判定し、車両が右折待ち状態にあると判定され、かつ歩行者が検出されている場合に、運転者の車両を発進させる意志が検出されたときは警告を行う。
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 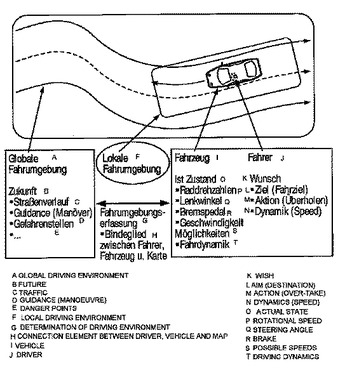 (もっと読む)
(もっと読む)
5,401 - 5,420 / 5,473
[ Back to top ]