
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
5,381 - 5,400 / 5,473
ナビゲーションシステム

【課題】車両が走行している道路に関し、車両の対向車線についての交通情報を取得するようにして、車両が走行した経路の交通情報を高い効率で取得することができるようにする。
【解決手段】自車の現在位置及び車速を自車情報として取得する自車情報取得部と、所定周期で対向車の画像を取得する画像情報取得部と、所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、前記対向車情報を蓄積する走行履歴情報データベースとを有する。
(もっと読む)
歩行者信号制御装置

【課題】 交差点や時間ごとの歩行者の人数の相違に容易に対応しながら適切な青信号時間を維持する。
【解決手段】 歩行者信号制御装置1は、歩行者密度検出部11により横断歩道周辺の所定の検出エリア内における歩行者を逐次検出して青信号制御部13に歩行者密度を出力する。青信号制御部13の最大値保持部131は歩行者密度の最大値を更新しながら保持し、現割合算出部132は最大値に対して歩行者密度が占める現割合を算出し、打切検出部32は現割合が打切閾値を下回る打切状態を検出し、点滅要求部135は打切状態の検出に応じて歩行者用信号機2に青信号の点滅開始を要求する。
(もっと読む)
車両用表示装置、および車両用表示装置を搭載した車両
【課題】 車両の周囲に存在する物体の注意喚起情報を運転者に表示すること。
【解決手段】 自車両の周囲に存在する物体を検出し(ステップS100)、当該物体の種別判定、および物体が存在する方向判定を行う。自車両から当該物体までの距離演算を行い(ステップS102)、当該物体が運転者に対して注意喚起が必要な物体であるか否かを判定して(ステップS103)、注意喚起が必要な物体な場合は、当該物体の種別、または自車両から当該物体までの距離の少なくともいずれか一方を示す文字列、またはシンボルを閾下知覚の範囲でHUDに表示した後、当該物体が存在する方向を示すシンボルを閾下知覚の範囲でHUDに表示する(ステップS105)。
(もっと読む)
ナンバープレート認識装置及び方法
【課題】
進行方向が切替わる交互通行道路において、上りと下りの2台のナンバープレート認識装置を、1台で実施できるナンバープレート認識装置を提供する。
【解決手段】
車両の画像を撮影する車番認識用カメラ1と、車番認識用カメラ1で撮影された画像を画像処理する画像処理プロセッサ13を有する画像処理装置2を備え、画像処理装置2により車番認識用カメラ1で撮影された2つフレームの画像投影間の像投影差分からテンプレート46を算出し、時間経過後の2つのフレームの画像投影間の画像投影差分からテンプレート46とマッチした領域を検索し、テンプレート46とマッチした領域から移動ベクトル50を計算して前面ナンバープレート認識処理と後面ナンバープレート認識処理を切替える。
(もっと読む)
ナビゲーションシステム
【課題】 移動体の経路誘導に不可欠な前方数10mから数100mの範囲での奥行き情報を、大掛かりな光学系を導入することなく搭乗者に掲示する経路誘導方法及び用いる経路誘導装置を提供する。
【解決手段】 移動体が備えるフロントガラスの前方に見える風景に重なるように像(図形、文字、記号を含む)を表示するナビゲーションシステムにおいて、該像中の少なくとも1つの図像(記号、文字を含む)の大きさを、該移動体の移動に伴う時間経過に沿って変化させながら搭乗者に掲示することを特徴とするナビゲーションシステム。
(もっと読む)
路面凍結可能性指数算出システム、路面凍結可能性指数算出方法及び路面凍結可能性指数算出プログラム
【課題】 路面がどの程度凍結しやすいのかを表す路面凍結可能性指数を算出すること。
【解決手段】 本発明に係る路面凍結可能性指数算出システム1は、路面温度を取得する路面温度取得部32と、路面に太陽光線が直達する時間を示す可照時間データを取得する可照時間取得部30と、前記路面温度取得部32により取得される路面温度と、前記可照時間データが示す路面に太陽光線が直達する時間と、に基づいて前記路面の凍結可能性を表す路面凍結可能性指数を算出する路面凍結可能性指数算出部36と、を含むことを特徴とする。
(もっと読む)
道路環境認識方法及び道路環境認識装置
【課題】 道路環境を高精度に認識することができる道路環境認識方法及び道路環境認識装置を提供することを課題とする。
【解決手段】 車両に搭載され、道路を撮像した撮像画像から道路環境を認識する道路環境認識装置1であって、任意の道路を撮像した撮像画像から線分を検出し、検出した線分に対して複数の特徴を算出し、各線分に対する複数の特徴と属性との関係を学習することによって得られた属性推定規則を記憶する記憶手段と、認識すべき道路を撮像する撮像手段2と、撮像手段2で撮像した撮像画像から線分を検出する線分検出手段3aと、線分検出手段3aで検出した線分に対して複数の特徴を算出する特徴算出手段3bと、記憶手段に記憶している属性推定規則に基づいて、特徴算出手段3bで算出した複数の特徴から線分の属性を推定する属性推定手段3cとを備え、各線分に対して推定した属性から道路環境を認識することを特徴とする。
(もっと読む)
車両用操舵制御装置
【課題】走行路に沿って車両を走行させる操舵アシストトルクを演算するとき、適正な演算を可能にして車両用操舵制御の精度を向上させる。
【解決手段】画像情報に基づいて車両が現在位置する地付近の、走行路の曲率1/R、横ずれ量ydあるいは車両偏向角θhを用いて操舵アシストトルクTLを演算する。即ち、離間した遠い位置の情報ではなく、車両位置付近の精度の高い情報に基づいて得たパラメータに基づいて操舵アシストトルクTLKを算出すると共に、ヨーレートを用いずに操舵アシストトルクTLKを算出する。
(もっと読む)
障害物検知支援装置
【課題】車外の障害物の位置を、立体音声により使用者に報知する。
【解決手段】車両10の外部に設けられ、車両の周囲の状況を画像として取得するカメラ3F、3R・・と、車両に対して着脱自在に設けられた画像表示装置1Bと、画像表示装置1Bの位置を検出する位置検出装置7と、スピーカー2F、2Rを備え、位置検出装置7で検出された位置に基づいて、使用者の視点から画像表示装置1Bへ向かう延長線上の、車両周囲状況を、カメラ3F・・で取得した画像から切り出し、画像表示装置1Bのディスプレイに表示するとともに、取得された画像から障害物を検出し、該障害物の位置を立体音声によって、使用者に報知する。
(もっと読む)
車両追突防護装置
【課題】駐車場に駐車している駐車車両に対する追突および当て逃げから防護することができること。
【解決手段】駐車中の駐車車両1を他車両2の追突から防護する車両追突防護装置20であって、レーダ装置12および撮像装置14は、駐車車両1の駐車領域を含む防護領域の監視をし、他車両対応部2081は、レーダ装置12および撮像装置14による監視結果、例えば、他車両が防護領域に侵入した、駐車車両1に追突すると推定される、または駐車車両1に追突したなどの監視結果に応じて警告、車両制御支援、防護領域情報提供または画像撮影などの対応をする。
(もっと読む)
車両位置特定装置
【課題】 車両の現在位置と、走行車線をより確実に特定する。
【解決手段】 信号機を魚眼レンズで撮像し、抽出した信号機画像から車両に対する仰角と水平角を算出し、これと信号機の位置座標、高さとから車両の現在位置を特定する。更に、車道外側線から信号機までの道路幅方向の距離と車線幅とから、走行車線を特定する。
カメラによる撮像対象として、走行する道路上及び周辺に多数存在する信号機を撮像するようにしているので、頻繁に走行道路上の正確な車両位置を特定することが可能になる。また、常時光りを発している信号機を撮像及び認識の対象としているので、夜間、雨天などの悪環境であっても、確実に信号機の認識、抽出が可能になる。従って、夜間や雨天等であっても、車両位置や走行車線を確実に特定することができる。
(もっと読む)
車両に対してナビゲーション情報を表示する方法及び装置
本発明は実質的に、直観的に容易に理解できるように車両に対するナビゲーション情報を仮想的なパイロット車両に車両周囲の画像を重ねた形で表示し、表示される仮想パイロット車両の表示様式、及び/又は位置、及び/又は向き、及び/又は大きさを、ルートもしくは動作の推奨、及び/又は車両速度、及び/又は推奨ルートの基準点、及び/又は車両の位置と向き、及び/又は車両周囲を検出するカメラの位置と向き、及び/又は運転者の目の位置と視線に依存して決定することから成る。  (もっと読む)
(もっと読む)
運行防犯監視システム
【課題】 既設の回線を利用して監視対象と監視センタとの間で通信を行うとともに、監視対象で得られた情報を監視センタに出力する運行防犯監視システムを提供する。
【解決手段】 運行防犯監視システム10は、監視対象にカメラ14および音声マイク16の少なくとも一方を備えた情報入力手段を設けるとともに、公衆回線24を利用して監視センタ26との間で双方向通信を行うテレビ電話機能を搭載した端末18を前記情報入力手段に接続し、前記監視センタ26に前記情報入力手段で取得された情報の出力手段32を設けた構成である。
(もっと読む)
運転者への通知方法および通知装置
手動切替トランスミッションを有する車両の運転者に通知する通知方法と通知装置が提案される。その通知は運転者に、クラッチペダルを操作すべきことを指示し、エンジン回転数がしきい値を下回った場合に出力される。 (もっと読む)
車載周辺状況検出装置
【課題】効率的に標識等の認識を行う「車載周辺状況検出装置」を提供する。
【解決手段】前照灯制御部5は、前照灯1の点灯/消灯の繰り返しを制御する。特徴領域抽出部10は、前照灯1の点灯時に撮影した点灯時画像a、前照灯1の点灯時に撮影した消灯時画像bを差し引いた画像を差分画像cとして生成し、差分画像c中の高輝度領域を特徴領域404として抽出する。画像認識処理部11は、点灯時画像aの特徴領域404の部分のみを対象として画像認識による標識等の認識を行う。
(もっと読む)
異常事象通知システムおよび異常事象通知方法
【課題】 監視カメラの撮影範囲外で異常事象が発生した場合、監視カメラの撮影範囲内で規模の小さな異常事象が発生した場合や照明設備がない場所で夜間に異常事象が発生した場合であっても異常事象の発生を検出させる。
【解決手段】 異常事象通知システム20の二次元画像生成部22は、映像受信部21により受信された映像に基づいて二次元画像を生成する。車両検出部23は、複数の二次元画像から車両に対応する車両画像を検出する。走行状態判定部24は、検出された車両画像に対応する車両が、異常事象発生時に特有の走行状態にあるか否かを判定する。異常事象発生時に特有の走行状態にあると判定された場合に、異常事象通知部25は、異常事象が発生した旨をユーザ端末30にメールで通知する。
(もっと読む)
ナビゲーション装置
【課題】 現在地の情報をより現実の環境に適合した効果的な形態で表示できるナビゲーション装置を提供すること。
【解決手段】 ナビゲーション部2で検出された現在地情報に基づいて、現在地に関連する関連画情報を入力するカメラ4と、ナビゲーション部2で検出された現在地情報に基づいて、画情報以外の現在地周辺の環境情報を入力するセンサ5と、関連画情報および環境情報のうち少なくとも一方に基づいて表示用合成画像の画情報を生成するグラフィック演算部8とを設け、表示部9によって合成画像を表示する。
(もっと読む)
車両の側方周囲の、ビデオベースの監視及び測定のための方法及び装置
初期の市販の運転者支援システムにおいては、適用形態により、走査の解像度と走査される領域の大きさのどちらを重要視するかを考える必要がある。従来のビデオベースのシステムは、解像度と記録範囲の両方を十分兼ね備えてはいるが、一般に、直接の距離情報を供給しない。本発明の目的を有する新規な設備によれば、路上走行車内に設置した場合には、複雑かつダイナミックな場面、たとえば、ダイナミックに動作している車両の視点から、道路の縁に対する側方の3D幾何学的形状を記録し、駐車する際にこれを利用することができるシステムを実現することができる。本発明によれば、車両の側方周囲の監視及び測定は、一方では、ディジタル画像を備えたカメラにより、他方では、画像にタイムスタンプを提供し、かつこれをバッファ処理するよう機能するコンピュータユニットにより表示される。車両の移動は、上記のデータに基づいて、バッファ処理された画像から画像の対を選択するために、さらに記録される。したがって、車両の側方周囲の局所3D深さ画像が、立体画像処理用のアルゴリズムによって生成できる。 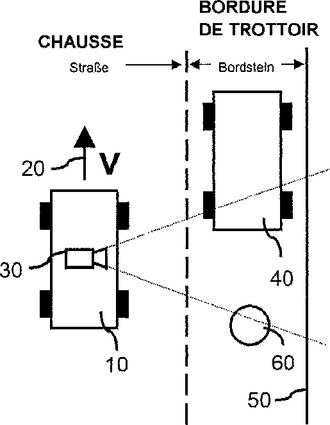 (もっと読む)
(もっと読む)
表示装置及びその表示制御方法
【課題】 画像表示を適切に行ってスイッチ操作支援の性能を向上させることが可能な表示装置及びその表示制御方法を提供する。
【解決手段】 表示装置1は、ユーザからの操作により、ディスプレイに表示される各表示項目101のいずれかの選択を受け付けるものである。この表示装置1は、ユーザからの操作を複数の操作部20により受け付け、複数の操作部20のいずれに対しユーザからの操作があったかを検出する。そして、表示装置1は、過去から現在にかけてのユーザからの操作に基づいて、複数の操作部20それぞれに対する操作頻度を判定する。次いで、表示装置1は、操作頻度の判定結果に応じて、各表示項目101の少なくとも1つの表示方法を変更してディスプレイ10に表示させる。
(もっと読む)
車両用走行支援装置
【課題】 車両の適切な誘導を図りながら、操舵手段の動きに対するドライバの違和感を低減することが可能な走行支援装置を提供する。
【解決手段】 車両用走行支援装置100は、初期位置から目標位置までの目標移動軌跡に沿って走行するように車両の走行を支援する。この装置100は、目標移動軌跡に沿って車両が走行するように転舵手段32の転舵角を制御するための制御パターンを生成する転舵角制御パターン生成手段12と、操舵手段32の操舵角を制御するための制御パターンを生成する操舵角制御パターン生成手段12と、転舵角の制御パターンに基づいて転舵手段32を制御し、操舵角の制御パターンに基づいて操舵手段22を制御する制御手段20,30と、を備える。
(もっと読む)
5,381 - 5,400 / 5,473
[ Back to top ]