
ナビゲーションシステム
【課題】車両が走行している道路に関し、車両の対向車線についての交通情報を取得するようにして、車両が走行した経路の交通情報を高い効率で取得することができるようにする。
【解決手段】自車の現在位置及び車速を自車情報として取得する自車情報取得部と、所定周期で対向車の画像を取得する画像情報取得部と、所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、前記対向車情報を蓄積する走行履歴情報データベースとを有する。
【解決手段】自車の現在位置及び車速を自車情報として取得する自車情報取得部と、所定周期で対向車の画像を取得する画像情報取得部と、所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、前記対向車情報を蓄積する走行履歴情報データベースとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関するものである。
【背景技術】
【0002】
従来、自動車等の車両に搭載されたナビゲーション装置においては、運転者等の操作者が所定の入力部を操作して目的地を設定すると、現在位置検出処理部によって検出された車両の現在位置を出発地として、該出発地から目的地までの経路が探索され、探索された経路が案内される。この場合、前記出発地から目的地までの距離が最短となるように経路を探索したり、所要時間が最短となるように経路を探索するようになっている。
【0003】
もっとも、一般的に、ナビゲーション装置は比較的大きな道路を通るように経路を設定し、また、実際の交通量等が十分に反映されないので、必ずしも所要時間が最短となる経路が設定されるとは限らない。そこで、過去において車両が走行した軌跡、車速、位置情報等の走行履歴を記憶手段に記憶させて蓄積し、次回以降に経路を探索する際に、蓄積された走行履歴に基づいて所要時間を算出して経路を設定する技術が提案されている(例えば、特許文献1参照。)。
【0004】
これにより、操作者が実際に走行した経験に基づいて所要時間が最短となる経路を設定することができる。
【特許文献1】特開2000−275053号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来のシステムにおいて、車両自体の走行履歴のみを蓄積するので、1つの道路に関しても前記車両の進行方向側の車線についての情報しか取得することができず、対向方向側の車線、すなわち、対向車線についての情報を取得することができなかった。
【0006】
本発明は、前記従来のシステムの問題点を解決して、車両が走行している道路に関し、車両の対向車線についての交通情報を取得するようにして、車両が走行した経路の交通情報を高い効率で取得することができるナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明のナビゲーションシステムにおいては、自車の現在位置及び車速を自車情報として取得する自車情報取得部と、所定周期で対向車の画像を取得する画像情報取得部と、所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、前記対向車情報を蓄積する走行履歴情報データベースとを有する。
【0008】
本発明の他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、前記自車の現在位置及び相対距離に基づいて、前記識別された対向車が位置するリンクのリンク番号を取得し、前記対向車情報は前記リンク番号に対応付けられて蓄積される。
【0009】
本発明の更に他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、前記画像の大きさに基づいて前記相対距離を測定する。
【0010】
本発明の更に他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、距離測定用センサによって前記相対距離を測定する。
【0011】
本発明の更に他のナビゲーションシステムにおいては、自車の現在位置及び車速を自車情報として取得する自車情報取得部、所定周期で対向車の画像を取得する画像情報取得部、所定時間経過前後の前記画像を対象に画像マッチングを行い同一の対向車を識別する画像情報マッチング部、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部、並びに、データの送受信を行う通信部を備える車載装置と、前記対向車情報を蓄積する走行履歴情報データベース、及び、データの送受信を行う通信部を備えるサーバとを有する。
【発明の効果】
【0012】
本発明によれば、車両が走行している道路に関し、対向車線についての交通情報を取得するようになっている。そのため、車両が走行した経路の交通情報を高い効率で取得することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0014】
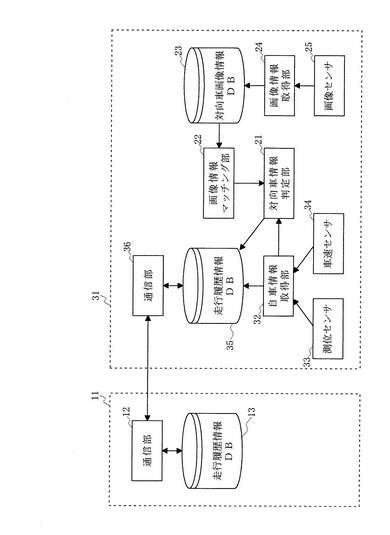
図2は本発明の実施の形態におけるナビゲーションシステムの構成を示す図である。
【0015】
図において、11はサーバとしての情報提供サーバであり、CPU、MPU等の演算手段、半導体メモリ、磁気ディスク、光ディスク等の記憶手段、通信インターフェイス等を備えるコンピュータの中に構成される。
【0016】
そして、31はユーザとしての操作者によって操作される車載装置であり、乗用車、トラック、バス、オートバイ等の車両に搭載される。なお、車載装置は、実際には多数であるが、本実施の形態においては、説明の都合上、前記車載装置31で代表する。また、前記操作者は、例えば、前記車両の運転者、同乗者等であるが、いかなる者であってもよい。そして、本実施の形態におけるナビゲーションシステムは、前記情報提供サーバ11と車載装置31とによって構成される。この場合、前記操作者は、あらかじめ前記ナビゲーションシステムに登録され、登録IDを所有する者であることが望ましい。また、前記車載装置31も登録されていることが望ましい。
【0017】
なお、該車載装置31は、CPU、MPU等の演算装置、半導体メモリ、磁気ディスク等の記憶装置、液晶ディスプレイ、LED(Light Emitting Diode)ディスプレイ、CRT等の表示装置、キーボード、ジョイスティック、十字キー、押しボタン、リモートコントローラ、タッチパネル等の入力装置、前記表示装置を制御する表示制御装置、及び、データの送受信を行う通信インターフェイス等の通信部36を備える。前記車載装置31は、出発地から目的地までの経路を探索する機能を有するものであれば、いかなるものであってもよいが、本実施の形態においては、車載装置31がナビゲーション装置である場合について説明する。
【0018】
さらに、前記車載装置31は、車両の現在位置検出装置としての測位センサ33を有する。該測位センサ33は、前記車載装置31が、例えば、ナビゲーション装置である場合、一般的には、GPS(Global Positioning System)、地磁気センサ、距離センサ、ステアリングセンサ、ビーコンセンサ、ジャイロセンサ、トリップメータ等によって現在位置を検出する。また、前記車載装置31は、車両の車速を検出する車速センサ34を有する。該車速センサ34は、例えば、車両の車輪の回転数等に基づいて車速を検出する。さらに、前記車載装置31は、画像を取得するための画像センサ25を有する。該画像センサ25は、CCD(Charge Coupled Device:電荷結合素子)、CMOS(Complementary Metal Oxide Semiconductor)等の撮像素子を備え、車体の前面部、運転席のフロントウィンドウ等に取り付けられ、対向車線を走行する車両等を撮影して、対向車線を走行する車両、すなわち、対向車との距離を取得したり、対向車との相対移動距離を取得したりすることができる。なお、対向車との距離や相対移動距離は、前記画像センサ25からの画像信号に基づいて測定してもよいし、車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサが測定するようにしてもよい。
【0019】
そして、前記車載装置31は、機能の観点から、前記画像センサ25が取得した対向車の画像を格納する対向車画像情報データベース23、前記画像センサ25が取得した対向車の画像を対向車画像情報データベース23に格納して蓄積させる画像情報取得部24、前記対向車画像情報データベース23に格納された対向車の画像の画像マッチングを行う画像情報マッチング部22、及び、該画像情報マッチング部22による画像マッチングの結果に基づいて対向車を特定し、該対向車の情報を判定する対向車情報判定部21を有する。また、前記車載装置31は、前記測位センサ33及び車速センサ34が検出した情報を自車情報として取得する自車情報取得部32、並びに、該自車情報取得部32が取得した自車情報及び前記対向車情報判定部21が判定した対向車情報を走行履歴情報として格納する走行履歴情報データベース35を有する。なお、前記対向車情報判定部21は、自車情報取得部32が取得した自車情報も参照して対向車情報を判定する。
【0020】
本実施の形態において、前記自車情報取得部32は自車の現在位置及び車速を自車情報として取得する。また、前記画像情報取得部24は所定周期で対向車の画像を取得する。さらに、前記画像情報マッチング部22は所定時間経過前後の画像を対象に画像マッチングを行って同一の対向車を識別する。そして、対向車情報判定部21は、自車情報及び自車と識別された対向車との相対距離に基づいて、識別された対向車の位置及び車速を対向車情報として取得する。
【0021】
さらに、前記車載装置31は、道路データ、探索データ等を含む地図データ等を記憶する記憶手段としてのデータ記録部、入力された情報に基づいて、設定された目的地までの経路を探索する経路探索処理、経路の走行案内処理、地点や施設の検索を行うPOI(Point of Interest)検索処理等のナビゲーション処理等の各種の演算処理を行うナビゲーション処理部、入力部、表示部、音声入力部及び音声出力部を有し、設定された目的地までの経路を探索して案内を行うようになっている。なお、前記道路データには、道路を構成する単位であるリンクに関する情報も含まれている。該情報には、リンクを一意に識別するために各リンクに付与されているリンク番号も含まれる。また、前記データ記録部には、所定の情報を音声出力部によって音声出力するための各種のデータも記録される。
【0022】
ここで、前記情報提供サーバ11は、機能の観点から、前記車載装置31とデータの送受信を行うための通信部12、及び、前記車載装置31から受信した走行履歴情報を格納する走行履歴情報データベース13を有する。なお、前記情報提供サーバ11は、図示されない交通情報データベース、該交通情報データベースにアクセスして必要なデータを取得して予測交通情報を作成するための処理を行う処理部等を有するものであることが望ましい。この場合、前記交通情報データベースは、例えば、VICS(R)(Vehicle Information & Communication System)と称される道路交通情報通信システムにおいて、警察、日本道路公団等の交通管制システムの情報を収集して作成した道路の渋滞等に関する情報や交通規制情報等の道路交通情報を格納する。さらに、複数の車載装置31から受信して走行履歴情報データベース13に格納されている走行履歴情報も格納する。また、前記処理部は、前記交通情報データベースに格納されている走行履歴情報等の交通情報に基づいて、予測リンク旅行時間パターン等の予測交通情報を作成する。なお、予測交通情報は、渋滞予測情報も含むものである。そして、前記予測交通情報を通信部12から車載装置31に配信することが望ましい。これにより、該車載装置31は、受信した予測交通情報に基づいて経路を探索することができ、所要時間が短く適切な経路を探索することができる。
【0023】
次に、前記構成のナビゲーションシステムの動作について説明する。ここでは、車載装置31が対向車の情報を取得する動作について説明する。
【0024】
図1は本発明の実施の形態における対向車の情報を取得する動作の概略を示す図である。
【0025】
まず、車載装置31が対向車の情報を取得する動作の概略を説明する。本実施の形態において、対向車の情報を取得する場合、まず、取得した対向車の画像に基づいて画像マッチングを行い、対向車を識別する。この場合、車両の特定の部位、例えば、ナンバープレート(正式には、自動車登録番号票又は車両番号票)の画像を対象に画像マッチングを行うことが望ましい。これは、ナンバープレートが乗用車、トラック、バス等の通常の車両の前後に取り付けることが義務付けられており(なお、オートバイは後ろのみ)、ナンバープレートには大板、中板及び小板の3種類の大きさしか存在せず、かつ、外交官用、自衛隊用等の特殊なものを除き、大板、中板及び小板のそれぞれによって番号を示す数字等の文字の大きさが統一されているために、画像マッチングを容易に行うことができ、しかも、前記数字等の文字によって車両を一意に識別することができるからである。なお、画像マッチングの対象は、ナンバープレートに限られるものではなく、車両のどの部位であってもよいし、車両の全体であってもよい。
【0026】
また、識別した対向車との相対距離を測定する。この場合、前記画像マッチングの対象としたナンバープレート等の画像のサイズ、すなわち、大きさによって、車載装置31が搭載された車両、すなわち、自車と識別した対向車との相対距離を測定することができる。また、自車の車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサによって、前記相対距離を測定することもできる。
【0027】
そして、対向車の識別、及び、識別した対向車との距離の測定を所定周期(例えば、1/10秒間隔)で行うことによって、自車と識別した対向車との相対移動距離を得ることができるので、自車の車速又は移動距離に基づいて、対向車の移動距離及び車速を算出することができる。さらに、前記対向車の移動距離及び車速から、対向車線における所要時間や渋滞度を算出することができる。
【0028】
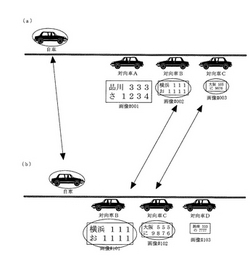
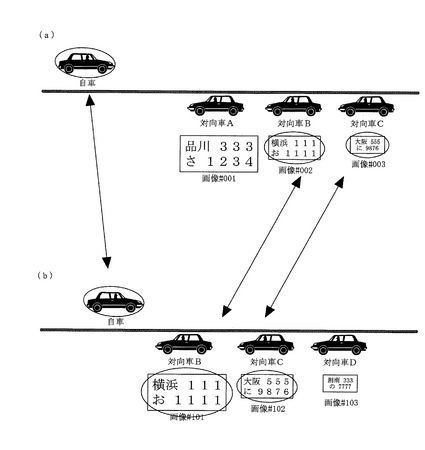
図1には、ナンバープレートの画像を利用して対向車線における所要時間や渋滞度を算出する方法が示されている。そして、図1(a)はある時刻(例えば、10:00:00)における自車と対向車との位置関係を示し、図1(b)は、図1(a)の時刻からある時間が経過した時刻(例えば、10:00:05)における自車と対向車との位置関係を示している。ここで、車載装置31は、画像センサ25によって、自車の前方に位置する対向車の内の先頭から3台のナンバープレートの画像を取得するものとする。
【0029】
この場合、図1(a)の時刻において、車載装置31は、対向車A〜対向車Cのナンバープレートの画像、すなわち、画像#001〜画像#003を取得する。そして、図1(b)の時刻において、車載装置31は、対向車B〜対向車Dのナンバープレートの画像、すなわち、画像#101〜画像#103を取得する。なお、図1(b)の時刻においては、対向車Aが既に自車とすれ違った後なので、対向車Aのナンバープレートの画像を取得することができない。また、図1(a)の時刻においては、対向車Dが先頭から3台に含まれていないので、対向車Dのナンバープレートの画像を取得することができない。そのため、取得した対向車のナンバープレートの画像に基づいて画像マッチングを行って対向車を識別することによって、図1(a)の時刻において取得した対向車B及び対向車Cのナンバープレートの画像#002及び画像#003と、図1(b)の時刻において取得した対向車B及び対向車Cのナンバープレートの画像#101及び画像#102とが、それぞれ、同一であることが認識される。すなわち、画像#002と画像#101とがマッチングされ、画像#003と画像#102とがマッチングされる。
【0030】
そして、画像がマッチングされたナンバープレートに関し、該ナンバープレートの大きさの縮尺比率によって、図1(a)の時刻から図1(b)の時刻までの時間における自車からの相対移動距離を取得することができる。すなわち、画像#002と画像#101との大きさの比率によって自車と対向車Bとの相対移動距離を取得することができ、画像#003と画像#102との大きさの比率によって自車と対向車Cとの相対移動距離を取得することができる。なお、レーザレーダ、ミリ波レーダ等の距離測定用センサによって、図1(a)の時刻及び図1(b)の時刻における対向車B及び対向車Cまでの距離を測定することによって、前記相対移動距離を取得するようにしてもよい。
【0031】
また、図1(a)の時刻から図1(b)の時刻までの時間における自車の移動距離は、測位センサ33及び車速センサ34によって取得することができる。そして、前記相対移動距離と自車の移動距離とによって対向車B及び対向車Cの移動距離及び車速を求めることができる。
【0032】
次に、車載装置31が対向車の情報を取得する動作について詳細に説明する。
【0033】
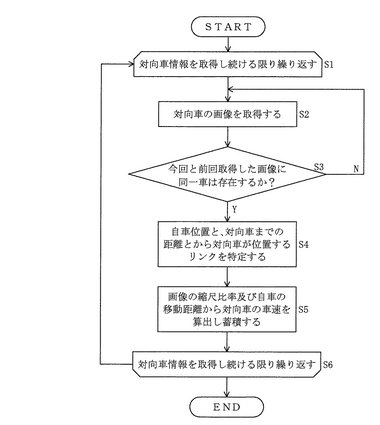
図3は本発明の実施の形態における対向車の情報を取得する動作を示すフローチャートである。
【0034】
車載装置31は、対向車の情報を取得する動作を開始すると、対向車の情報を取得し続ける限り繰り返すようになっている。そして、前記車載装置31は、画像センサ25によって対向車の画像を取得する。なお、該画像は所定周期で繰り返し取得する。また、対向車の画像として、対向車の特定の部位であるナンバープレートの画像を取得するものとして説明する。続いて、前記車載装置31は、今回と前回取得した画像に同一車は存在するか否か、すなわち、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像の中にマッチングされた画像が存在し、同一の対向車のナンバープレートの画像があるか否かを判断する。そして、同一車が存在しない場合には、再び、対向車の画像を取得して前述の動作を繰り返す。
【0035】
また、同一車が存在する場合、前記車載装置31は、自車位置と、対向車までの距離とから対向車が位置するリンクを特定する。すなわち、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像の中に同一の対向車のナンバープレートの画像がある場合、自車と前記対向車との相対距離を取得し、該相対距離に基づいて、前記対向車が位置する道路のリンクに付与されているリンク番号を取得する。この場合、前記ナンバープレートの画像のサイズ、すなわち、大きさによって、前記相対距離を測定することができる。また、自車の車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサによって、前記相対距離を測定することもできる。なお、前記リンク番号を取得する方法については後述する。
【0036】
続いて、前記車載装置31は、画像の縮尺比率及び自車の移動距離から対向車の車速を算出して蓄積する。この場合、前記車載装置31は、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像との大きさの比率としての縮尺比率によって自車と対向車との相対移動距離を取得する。また、測位センサ33及び車速センサ34によって自車の移動距離を取得する。そして、前記相対移動距離と自車の移動距離とによって対向車の車速を求め、該車速を走行履歴情報データベース35に格納して蓄積する。この場合、対向車の車速は前記リンク番号に対応付けて蓄積される。なお、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像との大きさの比率としての縮尺比率でなく、レーザレーダ、ミリ波レーダ等の距離測定用センサによって相対移動距離を取得するようにしてもよい。
【0037】
そして、前記車載装置31は、前述の動作を対向車の情報を取得し続ける限り繰り返し、対向車の情報を取得する必要がなくなると、処理を終了する。
【0038】
次に、フローチャートについて説明する。
ステップS1 ステップS6までの動作を対向車の情報を取得し続ける限り繰り返す。
ステップS2 画像センサ25によって対向車の画像を取得する。
ステップS3 今回と前回取得した画像に同一車は存在するか否かを判断する。今回と前回取得した画像に同一車は存在する場合はステップS4に進み、今回と前回取得した画像に同一車は存在しない場合はステップS2に戻る。
ステップS4 自車位置と、対向車までの距離とから対向車が位置するリンクを特定する。
ステップS5 画像の縮尺比率及び自車の移動距離から対向車の車速を算出して蓄積する。
ステップS6 ステップS1からの動作を対向車の情報を取得し続ける限り繰り返し、対向車の情報を取得する必要がなくなると、処理を終了する。
【0039】
次に、前記リンク番号を取得する動作について説明する。
【0040】
図4は本発明の実施の形態におけるリンク番号を取得する動作を示すフローチャートである。
【0041】
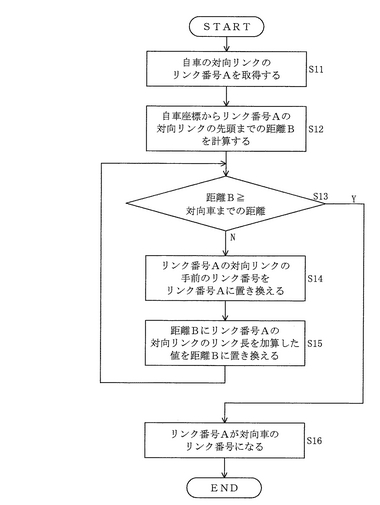
まず、車載装置31は自車の対向リンクのリンク番号Aを取得する。ここで、対向リンクは、対向車線を構成するリンクであって、自車の現在位置を示す座標位置に対応するリンクである。そして、前記対向リンクに付与されているリンク番号がAであるものとする。なお、リンク番号は道路データに含まれている。
【0042】
続いて、前記車載装置31は、自車座標からリンク番号Aの対向リンクの先頭までの距離Bを計算する。すなわち、自車の現在位置を示す座標位置から、リンク番号がAである対向車線を構成するリンクの始点までの距離を計算し、その値をBとする。なお、リンクの始点の座標位置は道路データに含まれている。そして、前記車載装置31は、距離Bが対向車までの距離、すなわち、相対距離以上であるか否かを判断する。ここで、距離Bが対向車までの距離以上である場合には、リンク番号Aが対向車のリンク番号である、すなわち、対向車が位置する道路のリンクに付与されているリンク番号はAであるとして、処理を終了する。これにより、対向車が位置する道路のリンクに付与されているリンク番号を取得することができる。
【0043】
また、距離Bが対向車までの距離以上でない場合、前記車載装置31は、リンク番号Aの対向リンクの手前のリンク番号をリンク番号Aに置き換える。すなわち、対向車線を構成するリンクであって、リンク番号がAのリンクより1つ手前に位置するリンクに付与されているリンク番号をAとする。続いて、前記車載装置31は、距離Bにリンク番号Aの対向リンクのリンク長を加算した値を距離Bに置き換える。すなわち、既に算出された距離Bの値に、リンク番号をAとしたリンクの長さを加算した値を算出し、算出された値を新たに距離Bとする。そして、再び、距離Bが対向車までの距離以上であるか否かを判断して、前述の動作を繰り返す。
【0044】
次に、フローチャートについて説明する。
ステップS11 自車の対向リンクのリンク番号Aを取得する。
ステップS12 自車座標からリンク番号Aの対向リンクの先頭までの距離Bを計算する。
ステップS13 距離Bが対向車までの距離以上であるか否かを判断する。距離Bが対向車までの距離以上である場合はステップS16に進み、距離Bが対向車までの距離以上でない場合はステップS14に進む。
ステップS14 リンク番号Aの対向リンクの手前のリンク番号をリンク番号Aに置き換える。
ステップS15 距離Bにリンク番号Aの対向リンクのリンク長を加算した値を距離Bに置き換える。
ステップS16 リンク番号Aが対向車のリンク番号であるとして、処理を終了する。
【0045】
次に、対向車線の所要時間や渋滞度を算出する動作について説明する。
【0046】
まず、車載装置31は、対向車の車速及び移動距離に基づいて、対向車線の所要時間を算出する。ここで、所要時間は、移動距離を車速で除算することによって算出される。そして、対向車の車速に基づいて渋滞度を判定する。なお、渋滞度の判定は、あらかじめ定められた渋滞度と車速との対応表に基づいて判定される。例えば、車速が8〔km/h〕以下であれば渋滞と判定し、車速が17〔km/h〕以下であれば混雑と判定し、車速が17〔km/h〕を超えていれば渋滞なしと判定する。また、対向車の車速は、対向車線のリンク番号に対応付けられているので、渋滞度も対向車線のリンク番号に対応付けて判定される。
【0047】
このようにして、車載装置31が取得した対向車の情報は、走行履歴情報データベース35に格納されて蓄積された後、情報提供サーバ11に送信される。なお、前記対向車の情報とともに、自車情報も情報提供サーバ11に送信される。また、該情報提供サーバ11は各車両に搭載された車載装置31から受信した自車情報及び対向車の情報を走行履歴情報データベース13に格納して蓄積する。なお、前記自車情報は自車が走行している進行方向側の車線のリンク番号に対応付けられ、対向車の情報は対向車線のリンク番号に対応付けられている。そして、前記情報提供サーバ11は、走行履歴情報データベース13に蓄積された自車情報、対向車の情報等の情報に基づいて統計処理を行い、予測リンク旅行時間パターン等の予測交通情報を作成する。
【0048】
なお、前記車載装置31は、走行履歴情報データベース35に蓄積された自車情報及び対向車の情報に基づいて統計処理を行い、予測リンク旅行時間パターン等の予測交通情報を作成することもできる。
【0049】
このように、本実施の形態において、車載装置31は、自車が走行している道路に関する進行方向側の車線の交通情報として自車情報を取得するともに、対向車線の交通情報として対向車の情報を取得するようになっている。そのため、車両が走行した経路の交通情報を高い効率で取得することができる。
【0050】
また、車載装置31は対向車の画像を対象に画像マッチングを行うことによって対向車を識別し、識別した該対向車との距離の取得を所定周期で行うことによって、前記対向車の車速を取得するようになっている。そのため、容易に、かつ、高い精度で対向車の車速を取得することができる。
【0051】
さらに、対向車との距離に基づいて、対向車が位置する対向車線のリンク番号を取得するので、対向車の車速を対向車線のリンク番号と対応付けることができる。そのため、対向車の車速等の情報に基づいて、リンク毎の渋滞度を判定することができ、また、予測リンク旅行時間パターン等を作成することができる。
【0052】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0053】
【図1】本発明の実施の形態における対向車の情報を取得する動作の概略を示す図である。
【図2】本発明の実施の形態におけるナビゲーションシステムの構成を示す図である。
【図3】本発明の実施の形態における対向車の情報を取得する動作を示すフローチャートである。
【図4】本発明の実施の形態におけるリンク番号を取得する動作を示すフローチャートである。
【符号の説明】
【0054】
11 情報提供サーバ
12、36 通信部
13、35 走行履歴情報データベース
21 対向車情報判定部
22 画像情報マッチング部
24 画像情報取得部
31 車載装置
32 自車情報取得部
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関するものである。
【背景技術】
【0002】
従来、自動車等の車両に搭載されたナビゲーション装置においては、運転者等の操作者が所定の入力部を操作して目的地を設定すると、現在位置検出処理部によって検出された車両の現在位置を出発地として、該出発地から目的地までの経路が探索され、探索された経路が案内される。この場合、前記出発地から目的地までの距離が最短となるように経路を探索したり、所要時間が最短となるように経路を探索するようになっている。
【0003】
もっとも、一般的に、ナビゲーション装置は比較的大きな道路を通るように経路を設定し、また、実際の交通量等が十分に反映されないので、必ずしも所要時間が最短となる経路が設定されるとは限らない。そこで、過去において車両が走行した軌跡、車速、位置情報等の走行履歴を記憶手段に記憶させて蓄積し、次回以降に経路を探索する際に、蓄積された走行履歴に基づいて所要時間を算出して経路を設定する技術が提案されている(例えば、特許文献1参照。)。
【0004】
これにより、操作者が実際に走行した経験に基づいて所要時間が最短となる経路を設定することができる。
【特許文献1】特開2000−275053号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来のシステムにおいて、車両自体の走行履歴のみを蓄積するので、1つの道路に関しても前記車両の進行方向側の車線についての情報しか取得することができず、対向方向側の車線、すなわち、対向車線についての情報を取得することができなかった。
【0006】
本発明は、前記従来のシステムの問題点を解決して、車両が走行している道路に関し、車両の対向車線についての交通情報を取得するようにして、車両が走行した経路の交通情報を高い効率で取得することができるナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明のナビゲーションシステムにおいては、自車の現在位置及び車速を自車情報として取得する自車情報取得部と、所定周期で対向車の画像を取得する画像情報取得部と、所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、前記対向車情報を蓄積する走行履歴情報データベースとを有する。
【0008】
本発明の他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、前記自車の現在位置及び相対距離に基づいて、前記識別された対向車が位置するリンクのリンク番号を取得し、前記対向車情報は前記リンク番号に対応付けられて蓄積される。
【0009】
本発明の更に他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、前記画像の大きさに基づいて前記相対距離を測定する。
【0010】
本発明の更に他のナビゲーションシステムにおいては、さらに、前記対向車情報判定部は、距離測定用センサによって前記相対距離を測定する。
【0011】
本発明の更に他のナビゲーションシステムにおいては、自車の現在位置及び車速を自車情報として取得する自車情報取得部、所定周期で対向車の画像を取得する画像情報取得部、所定時間経過前後の前記画像を対象に画像マッチングを行い同一の対向車を識別する画像情報マッチング部、前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部、並びに、データの送受信を行う通信部を備える車載装置と、前記対向車情報を蓄積する走行履歴情報データベース、及び、データの送受信を行う通信部を備えるサーバとを有する。
【発明の効果】
【0012】
本発明によれば、車両が走行している道路に関し、対向車線についての交通情報を取得するようになっている。そのため、車両が走行した経路の交通情報を高い効率で取得することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0014】
図2は本発明の実施の形態におけるナビゲーションシステムの構成を示す図である。
【0015】
図において、11はサーバとしての情報提供サーバであり、CPU、MPU等の演算手段、半導体メモリ、磁気ディスク、光ディスク等の記憶手段、通信インターフェイス等を備えるコンピュータの中に構成される。
【0016】
そして、31はユーザとしての操作者によって操作される車載装置であり、乗用車、トラック、バス、オートバイ等の車両に搭載される。なお、車載装置は、実際には多数であるが、本実施の形態においては、説明の都合上、前記車載装置31で代表する。また、前記操作者は、例えば、前記車両の運転者、同乗者等であるが、いかなる者であってもよい。そして、本実施の形態におけるナビゲーションシステムは、前記情報提供サーバ11と車載装置31とによって構成される。この場合、前記操作者は、あらかじめ前記ナビゲーションシステムに登録され、登録IDを所有する者であることが望ましい。また、前記車載装置31も登録されていることが望ましい。
【0017】
なお、該車載装置31は、CPU、MPU等の演算装置、半導体メモリ、磁気ディスク等の記憶装置、液晶ディスプレイ、LED(Light Emitting Diode)ディスプレイ、CRT等の表示装置、キーボード、ジョイスティック、十字キー、押しボタン、リモートコントローラ、タッチパネル等の入力装置、前記表示装置を制御する表示制御装置、及び、データの送受信を行う通信インターフェイス等の通信部36を備える。前記車載装置31は、出発地から目的地までの経路を探索する機能を有するものであれば、いかなるものであってもよいが、本実施の形態においては、車載装置31がナビゲーション装置である場合について説明する。
【0018】
さらに、前記車載装置31は、車両の現在位置検出装置としての測位センサ33を有する。該測位センサ33は、前記車載装置31が、例えば、ナビゲーション装置である場合、一般的には、GPS(Global Positioning System)、地磁気センサ、距離センサ、ステアリングセンサ、ビーコンセンサ、ジャイロセンサ、トリップメータ等によって現在位置を検出する。また、前記車載装置31は、車両の車速を検出する車速センサ34を有する。該車速センサ34は、例えば、車両の車輪の回転数等に基づいて車速を検出する。さらに、前記車載装置31は、画像を取得するための画像センサ25を有する。該画像センサ25は、CCD(Charge Coupled Device:電荷結合素子)、CMOS(Complementary Metal Oxide Semiconductor)等の撮像素子を備え、車体の前面部、運転席のフロントウィンドウ等に取り付けられ、対向車線を走行する車両等を撮影して、対向車線を走行する車両、すなわち、対向車との距離を取得したり、対向車との相対移動距離を取得したりすることができる。なお、対向車との距離や相対移動距離は、前記画像センサ25からの画像信号に基づいて測定してもよいし、車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサが測定するようにしてもよい。
【0019】
そして、前記車載装置31は、機能の観点から、前記画像センサ25が取得した対向車の画像を格納する対向車画像情報データベース23、前記画像センサ25が取得した対向車の画像を対向車画像情報データベース23に格納して蓄積させる画像情報取得部24、前記対向車画像情報データベース23に格納された対向車の画像の画像マッチングを行う画像情報マッチング部22、及び、該画像情報マッチング部22による画像マッチングの結果に基づいて対向車を特定し、該対向車の情報を判定する対向車情報判定部21を有する。また、前記車載装置31は、前記測位センサ33及び車速センサ34が検出した情報を自車情報として取得する自車情報取得部32、並びに、該自車情報取得部32が取得した自車情報及び前記対向車情報判定部21が判定した対向車情報を走行履歴情報として格納する走行履歴情報データベース35を有する。なお、前記対向車情報判定部21は、自車情報取得部32が取得した自車情報も参照して対向車情報を判定する。
【0020】
本実施の形態において、前記自車情報取得部32は自車の現在位置及び車速を自車情報として取得する。また、前記画像情報取得部24は所定周期で対向車の画像を取得する。さらに、前記画像情報マッチング部22は所定時間経過前後の画像を対象に画像マッチングを行って同一の対向車を識別する。そして、対向車情報判定部21は、自車情報及び自車と識別された対向車との相対距離に基づいて、識別された対向車の位置及び車速を対向車情報として取得する。
【0021】
さらに、前記車載装置31は、道路データ、探索データ等を含む地図データ等を記憶する記憶手段としてのデータ記録部、入力された情報に基づいて、設定された目的地までの経路を探索する経路探索処理、経路の走行案内処理、地点や施設の検索を行うPOI(Point of Interest)検索処理等のナビゲーション処理等の各種の演算処理を行うナビゲーション処理部、入力部、表示部、音声入力部及び音声出力部を有し、設定された目的地までの経路を探索して案内を行うようになっている。なお、前記道路データには、道路を構成する単位であるリンクに関する情報も含まれている。該情報には、リンクを一意に識別するために各リンクに付与されているリンク番号も含まれる。また、前記データ記録部には、所定の情報を音声出力部によって音声出力するための各種のデータも記録される。
【0022】
ここで、前記情報提供サーバ11は、機能の観点から、前記車載装置31とデータの送受信を行うための通信部12、及び、前記車載装置31から受信した走行履歴情報を格納する走行履歴情報データベース13を有する。なお、前記情報提供サーバ11は、図示されない交通情報データベース、該交通情報データベースにアクセスして必要なデータを取得して予測交通情報を作成するための処理を行う処理部等を有するものであることが望ましい。この場合、前記交通情報データベースは、例えば、VICS(R)(Vehicle Information & Communication System)と称される道路交通情報通信システムにおいて、警察、日本道路公団等の交通管制システムの情報を収集して作成した道路の渋滞等に関する情報や交通規制情報等の道路交通情報を格納する。さらに、複数の車載装置31から受信して走行履歴情報データベース13に格納されている走行履歴情報も格納する。また、前記処理部は、前記交通情報データベースに格納されている走行履歴情報等の交通情報に基づいて、予測リンク旅行時間パターン等の予測交通情報を作成する。なお、予測交通情報は、渋滞予測情報も含むものである。そして、前記予測交通情報を通信部12から車載装置31に配信することが望ましい。これにより、該車載装置31は、受信した予測交通情報に基づいて経路を探索することができ、所要時間が短く適切な経路を探索することができる。
【0023】
次に、前記構成のナビゲーションシステムの動作について説明する。ここでは、車載装置31が対向車の情報を取得する動作について説明する。
【0024】
図1は本発明の実施の形態における対向車の情報を取得する動作の概略を示す図である。
【0025】
まず、車載装置31が対向車の情報を取得する動作の概略を説明する。本実施の形態において、対向車の情報を取得する場合、まず、取得した対向車の画像に基づいて画像マッチングを行い、対向車を識別する。この場合、車両の特定の部位、例えば、ナンバープレート(正式には、自動車登録番号票又は車両番号票)の画像を対象に画像マッチングを行うことが望ましい。これは、ナンバープレートが乗用車、トラック、バス等の通常の車両の前後に取り付けることが義務付けられており(なお、オートバイは後ろのみ)、ナンバープレートには大板、中板及び小板の3種類の大きさしか存在せず、かつ、外交官用、自衛隊用等の特殊なものを除き、大板、中板及び小板のそれぞれによって番号を示す数字等の文字の大きさが統一されているために、画像マッチングを容易に行うことができ、しかも、前記数字等の文字によって車両を一意に識別することができるからである。なお、画像マッチングの対象は、ナンバープレートに限られるものではなく、車両のどの部位であってもよいし、車両の全体であってもよい。
【0026】
また、識別した対向車との相対距離を測定する。この場合、前記画像マッチングの対象としたナンバープレート等の画像のサイズ、すなわち、大きさによって、車載装置31が搭載された車両、すなわち、自車と識別した対向車との相対距離を測定することができる。また、自車の車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサによって、前記相対距離を測定することもできる。
【0027】
そして、対向車の識別、及び、識別した対向車との距離の測定を所定周期(例えば、1/10秒間隔)で行うことによって、自車と識別した対向車との相対移動距離を得ることができるので、自車の車速又は移動距離に基づいて、対向車の移動距離及び車速を算出することができる。さらに、前記対向車の移動距離及び車速から、対向車線における所要時間や渋滞度を算出することができる。
【0028】
図1には、ナンバープレートの画像を利用して対向車線における所要時間や渋滞度を算出する方法が示されている。そして、図1(a)はある時刻(例えば、10:00:00)における自車と対向車との位置関係を示し、図1(b)は、図1(a)の時刻からある時間が経過した時刻(例えば、10:00:05)における自車と対向車との位置関係を示している。ここで、車載装置31は、画像センサ25によって、自車の前方に位置する対向車の内の先頭から3台のナンバープレートの画像を取得するものとする。
【0029】
この場合、図1(a)の時刻において、車載装置31は、対向車A〜対向車Cのナンバープレートの画像、すなわち、画像#001〜画像#003を取得する。そして、図1(b)の時刻において、車載装置31は、対向車B〜対向車Dのナンバープレートの画像、すなわち、画像#101〜画像#103を取得する。なお、図1(b)の時刻においては、対向車Aが既に自車とすれ違った後なので、対向車Aのナンバープレートの画像を取得することができない。また、図1(a)の時刻においては、対向車Dが先頭から3台に含まれていないので、対向車Dのナンバープレートの画像を取得することができない。そのため、取得した対向車のナンバープレートの画像に基づいて画像マッチングを行って対向車を識別することによって、図1(a)の時刻において取得した対向車B及び対向車Cのナンバープレートの画像#002及び画像#003と、図1(b)の時刻において取得した対向車B及び対向車Cのナンバープレートの画像#101及び画像#102とが、それぞれ、同一であることが認識される。すなわち、画像#002と画像#101とがマッチングされ、画像#003と画像#102とがマッチングされる。
【0030】
そして、画像がマッチングされたナンバープレートに関し、該ナンバープレートの大きさの縮尺比率によって、図1(a)の時刻から図1(b)の時刻までの時間における自車からの相対移動距離を取得することができる。すなわち、画像#002と画像#101との大きさの比率によって自車と対向車Bとの相対移動距離を取得することができ、画像#003と画像#102との大きさの比率によって自車と対向車Cとの相対移動距離を取得することができる。なお、レーザレーダ、ミリ波レーダ等の距離測定用センサによって、図1(a)の時刻及び図1(b)の時刻における対向車B及び対向車Cまでの距離を測定することによって、前記相対移動距離を取得するようにしてもよい。
【0031】
また、図1(a)の時刻から図1(b)の時刻までの時間における自車の移動距離は、測位センサ33及び車速センサ34によって取得することができる。そして、前記相対移動距離と自車の移動距離とによって対向車B及び対向車Cの移動距離及び車速を求めることができる。
【0032】
次に、車載装置31が対向車の情報を取得する動作について詳細に説明する。
【0033】
図3は本発明の実施の形態における対向車の情報を取得する動作を示すフローチャートである。
【0034】
車載装置31は、対向車の情報を取得する動作を開始すると、対向車の情報を取得し続ける限り繰り返すようになっている。そして、前記車載装置31は、画像センサ25によって対向車の画像を取得する。なお、該画像は所定周期で繰り返し取得する。また、対向車の画像として、対向車の特定の部位であるナンバープレートの画像を取得するものとして説明する。続いて、前記車載装置31は、今回と前回取得した画像に同一車は存在するか否か、すなわち、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像の中にマッチングされた画像が存在し、同一の対向車のナンバープレートの画像があるか否かを判断する。そして、同一車が存在しない場合には、再び、対向車の画像を取得して前述の動作を繰り返す。
【0035】
また、同一車が存在する場合、前記車載装置31は、自車位置と、対向車までの距離とから対向車が位置するリンクを特定する。すなわち、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像の中に同一の対向車のナンバープレートの画像がある場合、自車と前記対向車との相対距離を取得し、該相対距離に基づいて、前記対向車が位置する道路のリンクに付与されているリンク番号を取得する。この場合、前記ナンバープレートの画像のサイズ、すなわち、大きさによって、前記相対距離を測定することができる。また、自車の車体の前面部等に取り付けられたレーザレーダ、ミリ波レーダ等の距離測定用センサによって、前記相対距離を測定することもできる。なお、前記リンク番号を取得する方法については後述する。
【0036】
続いて、前記車載装置31は、画像の縮尺比率及び自車の移動距離から対向車の車速を算出して蓄積する。この場合、前記車載装置31は、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像との大きさの比率としての縮尺比率によって自車と対向車との相対移動距離を取得する。また、測位センサ33及び車速センサ34によって自車の移動距離を取得する。そして、前記相対移動距離と自車の移動距離とによって対向車の車速を求め、該車速を走行履歴情報データベース35に格納して蓄積する。この場合、対向車の車速は前記リンク番号に対応付けて蓄積される。なお、今回取得したナンバープレートの画像と前回取得したナンバープレートの画像との大きさの比率としての縮尺比率でなく、レーザレーダ、ミリ波レーダ等の距離測定用センサによって相対移動距離を取得するようにしてもよい。
【0037】
そして、前記車載装置31は、前述の動作を対向車の情報を取得し続ける限り繰り返し、対向車の情報を取得する必要がなくなると、処理を終了する。
【0038】
次に、フローチャートについて説明する。
ステップS1 ステップS6までの動作を対向車の情報を取得し続ける限り繰り返す。
ステップS2 画像センサ25によって対向車の画像を取得する。
ステップS3 今回と前回取得した画像に同一車は存在するか否かを判断する。今回と前回取得した画像に同一車は存在する場合はステップS4に進み、今回と前回取得した画像に同一車は存在しない場合はステップS2に戻る。
ステップS4 自車位置と、対向車までの距離とから対向車が位置するリンクを特定する。
ステップS5 画像の縮尺比率及び自車の移動距離から対向車の車速を算出して蓄積する。
ステップS6 ステップS1からの動作を対向車の情報を取得し続ける限り繰り返し、対向車の情報を取得する必要がなくなると、処理を終了する。
【0039】
次に、前記リンク番号を取得する動作について説明する。
【0040】
図4は本発明の実施の形態におけるリンク番号を取得する動作を示すフローチャートである。
【0041】
まず、車載装置31は自車の対向リンクのリンク番号Aを取得する。ここで、対向リンクは、対向車線を構成するリンクであって、自車の現在位置を示す座標位置に対応するリンクである。そして、前記対向リンクに付与されているリンク番号がAであるものとする。なお、リンク番号は道路データに含まれている。
【0042】
続いて、前記車載装置31は、自車座標からリンク番号Aの対向リンクの先頭までの距離Bを計算する。すなわち、自車の現在位置を示す座標位置から、リンク番号がAである対向車線を構成するリンクの始点までの距離を計算し、その値をBとする。なお、リンクの始点の座標位置は道路データに含まれている。そして、前記車載装置31は、距離Bが対向車までの距離、すなわち、相対距離以上であるか否かを判断する。ここで、距離Bが対向車までの距離以上である場合には、リンク番号Aが対向車のリンク番号である、すなわち、対向車が位置する道路のリンクに付与されているリンク番号はAであるとして、処理を終了する。これにより、対向車が位置する道路のリンクに付与されているリンク番号を取得することができる。
【0043】
また、距離Bが対向車までの距離以上でない場合、前記車載装置31は、リンク番号Aの対向リンクの手前のリンク番号をリンク番号Aに置き換える。すなわち、対向車線を構成するリンクであって、リンク番号がAのリンクより1つ手前に位置するリンクに付与されているリンク番号をAとする。続いて、前記車載装置31は、距離Bにリンク番号Aの対向リンクのリンク長を加算した値を距離Bに置き換える。すなわち、既に算出された距離Bの値に、リンク番号をAとしたリンクの長さを加算した値を算出し、算出された値を新たに距離Bとする。そして、再び、距離Bが対向車までの距離以上であるか否かを判断して、前述の動作を繰り返す。
【0044】
次に、フローチャートについて説明する。
ステップS11 自車の対向リンクのリンク番号Aを取得する。
ステップS12 自車座標からリンク番号Aの対向リンクの先頭までの距離Bを計算する。
ステップS13 距離Bが対向車までの距離以上であるか否かを判断する。距離Bが対向車までの距離以上である場合はステップS16に進み、距離Bが対向車までの距離以上でない場合はステップS14に進む。
ステップS14 リンク番号Aの対向リンクの手前のリンク番号をリンク番号Aに置き換える。
ステップS15 距離Bにリンク番号Aの対向リンクのリンク長を加算した値を距離Bに置き換える。
ステップS16 リンク番号Aが対向車のリンク番号であるとして、処理を終了する。
【0045】
次に、対向車線の所要時間や渋滞度を算出する動作について説明する。
【0046】
まず、車載装置31は、対向車の車速及び移動距離に基づいて、対向車線の所要時間を算出する。ここで、所要時間は、移動距離を車速で除算することによって算出される。そして、対向車の車速に基づいて渋滞度を判定する。なお、渋滞度の判定は、あらかじめ定められた渋滞度と車速との対応表に基づいて判定される。例えば、車速が8〔km/h〕以下であれば渋滞と判定し、車速が17〔km/h〕以下であれば混雑と判定し、車速が17〔km/h〕を超えていれば渋滞なしと判定する。また、対向車の車速は、対向車線のリンク番号に対応付けられているので、渋滞度も対向車線のリンク番号に対応付けて判定される。
【0047】
このようにして、車載装置31が取得した対向車の情報は、走行履歴情報データベース35に格納されて蓄積された後、情報提供サーバ11に送信される。なお、前記対向車の情報とともに、自車情報も情報提供サーバ11に送信される。また、該情報提供サーバ11は各車両に搭載された車載装置31から受信した自車情報及び対向車の情報を走行履歴情報データベース13に格納して蓄積する。なお、前記自車情報は自車が走行している進行方向側の車線のリンク番号に対応付けられ、対向車の情報は対向車線のリンク番号に対応付けられている。そして、前記情報提供サーバ11は、走行履歴情報データベース13に蓄積された自車情報、対向車の情報等の情報に基づいて統計処理を行い、予測リンク旅行時間パターン等の予測交通情報を作成する。
【0048】
なお、前記車載装置31は、走行履歴情報データベース35に蓄積された自車情報及び対向車の情報に基づいて統計処理を行い、予測リンク旅行時間パターン等の予測交通情報を作成することもできる。
【0049】
このように、本実施の形態において、車載装置31は、自車が走行している道路に関する進行方向側の車線の交通情報として自車情報を取得するともに、対向車線の交通情報として対向車の情報を取得するようになっている。そのため、車両が走行した経路の交通情報を高い効率で取得することができる。
【0050】
また、車載装置31は対向車の画像を対象に画像マッチングを行うことによって対向車を識別し、識別した該対向車との距離の取得を所定周期で行うことによって、前記対向車の車速を取得するようになっている。そのため、容易に、かつ、高い精度で対向車の車速を取得することができる。
【0051】
さらに、対向車との距離に基づいて、対向車が位置する対向車線のリンク番号を取得するので、対向車の車速を対向車線のリンク番号と対応付けることができる。そのため、対向車の車速等の情報に基づいて、リンク毎の渋滞度を判定することができ、また、予測リンク旅行時間パターン等を作成することができる。
【0052】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0053】
【図1】本発明の実施の形態における対向車の情報を取得する動作の概略を示す図である。
【図2】本発明の実施の形態におけるナビゲーションシステムの構成を示す図である。
【図3】本発明の実施の形態における対向車の情報を取得する動作を示すフローチャートである。
【図4】本発明の実施の形態におけるリンク番号を取得する動作を示すフローチャートである。
【符号の説明】
【0054】
11 情報提供サーバ
12、36 通信部
13、35 走行履歴情報データベース
21 対向車情報判定部
22 画像情報マッチング部
24 画像情報取得部
31 車載装置
32 自車情報取得部
【特許請求の範囲】
【請求項1】
(a)自車の現在位置及び車速を自車情報として取得する自車情報取得部と、
(b)所定周期で対向車の画像を取得する画像情報取得部と、
(c)所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、
(d)前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、
(e)前記対向車情報を蓄積する走行履歴情報データベースとを有することを特徴とするナビゲーションシステム。
【請求項2】
(a)前記対向車情報判定部は、前記自車の現在位置及び相対距離に基づいて、前記識別された対向車が位置するリンクのリンク番号を取得し、
(b)前記対向車情報は前記リンク番号に対応付けられて蓄積される請求項1に記載のナビゲーションシステム。
【請求項3】
前記対向車情報判定部は、前記画像の大きさに基づいて前記相対距離を測定する請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記対向車情報判定部は、距離測定用センサによって前記相対距離を測定する請求項1又は2に記載のナビゲーションシステム。
【請求項5】
(a)自車の現在位置及び車速を自車情報として取得する自車情報取得部、
(b)所定周期で対向車の画像を取得する画像情報取得部、
(c)所定時間経過前後の前記画像を対象に画像マッチングを行い同一の対向車を識別する画像情報マッチング部、
(d)前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部、並びに、
(e)データの送受信を行う通信部を備える車載装置と、
(f)前記対向車情報を蓄積する走行履歴情報データベース、及び、
(g)データの送受信を行う通信部を備えるサーバとを有することを特徴とするナビゲーションシステム。
【請求項1】
(a)自車の現在位置及び車速を自車情報として取得する自車情報取得部と、
(b)所定周期で対向車の画像を取得する画像情報取得部と、
(c)所定時間経過前後の前記画像を対象に画像マッチングを行って同一の対向車を識別する画像情報マッチング部と、
(d)前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部と、
(e)前記対向車情報を蓄積する走行履歴情報データベースとを有することを特徴とするナビゲーションシステム。
【請求項2】
(a)前記対向車情報判定部は、前記自車の現在位置及び相対距離に基づいて、前記識別された対向車が位置するリンクのリンク番号を取得し、
(b)前記対向車情報は前記リンク番号に対応付けられて蓄積される請求項1に記載のナビゲーションシステム。
【請求項3】
前記対向車情報判定部は、前記画像の大きさに基づいて前記相対距離を測定する請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記対向車情報判定部は、距離測定用センサによって前記相対距離を測定する請求項1又は2に記載のナビゲーションシステム。
【請求項5】
(a)自車の現在位置及び車速を自車情報として取得する自車情報取得部、
(b)所定周期で対向車の画像を取得する画像情報取得部、
(c)所定時間経過前後の前記画像を対象に画像マッチングを行い同一の対向車を識別する画像情報マッチング部、
(d)前記自車情報及び前記自車と識別された対向車との相対距離に基づいて、前記識別された対向車の位置及び車速を対向車情報として取得する対向車情報判定部、並びに、
(e)データの送受信を行う通信部を備える車載装置と、
(f)前記対向車情報を蓄積する走行履歴情報データベース、及び、
(g)データの送受信を行う通信部を備えるサーバとを有することを特徴とするナビゲーションシステム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−17473(P2006−17473A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−192981(P2004−192981)
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]