
Fターム[5H180FF27]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 車載のもの (8,483)
Fターム[5H180FF27]に分類される特許
341 - 360 / 8,483
車両用運転支援装置
【課題】車線逸脱に対する警報をよりドライバのフィーリングに合致したタイミングで行うことができる車両用運転支援装置を提供する。
【解決手段】制御ユニット5は、自車両1前方で認識した白線に沿って警報判定用ラインを設定し、当該警報判定用ラインと自車両との相対的な位置関係に基づいて車線逸脱警報を行う場合において、左右の白線H1,H2に沿って設定した基準となる警報判定用ラインwl,wrに対する補正量Dl,Drを予め設定された条件に基づいてそれぞれ演算し、白線H1,H2の外側或いは内側に対して各警報判定用ラインwl,wrを補正量Dl,Drだけオフセットさせて最終的な警報判定用ラインWl,Wrを設定する。
(もっと読む)
運転評価装置

【課題】 一時停止箇所における運転者の運転行動を精度良く評価することができる運転評価装置を提供する。
【解決手段】 運転評価装置1では、自車両が走行すると判定された一時停止箇所に評価区間が設定された場合において、評価区間内での停止時間が第1の時間t1未満であり、且つ評価区間の通過時間が第2の時間t2未満であるときに、評価区間における自車両の運転者の運転行動が評価される。これにより、視認し易い場所における外乱(先行車両、通過車両、自転車、歩行者等)に起因した停止や徐行が除外されて、視認し難い場所に対して運転者が意識的に安全確認を行った上での一時停止に基づいて、運転者の運転行動が評価される。
(もっと読む)
ナビゲーションシステム、データ提供装置、ナビゲーション方法及びプログラム
【課題】自車位置マークが表示されている地図を移動して外れる場合にのみ地図画像データを更新表示するカーナビゲーションシステムにおいて、地図画像データを更新する毎に画面上における自車位置マークの位置を予測しやすくする技術を提供する。
【解決手段】ナビゲーションシステムの車載機では、座標データを受信する毎に切出地図画像データを維持しつつ自車位置マークの位置のみが更新される。切出地図画像データを生成する携帯端末の制御部は、ルートの進行方向に合わせて切出地図画像データの地図方向を決定する。このため、自車位置マークの移動の始まる位置や終わる位置が定まって、ユーザはその移動が一定の場所から始まる、一定の場所で終わるという一定の法則を認識でき、地図画像の更新の際は自車位置マークの位置を容易に予測することができる。
(もっと読む)
情報提供装置、情報提供方法、およびコンピュータプログラム
【課題】表示についての煩雑さをユーザに感じさせることなく、ユーザに紹介すべき地点の情報をユーザに提供する。
【解決手段】(a)指定位置を表す指定位置情報を取得する。(b)指定位置表示を表示部202に表示するとともに、ユーザに紹介すべき対象地点を表す対象地点情報に基づいて、対象地点を表す対象地点表示を、表示部202に表示する。その際、(b1)指定位置の近傍にある対象地点について、指定位置が対象地点に接近している第1区間に、対象地点表示を第1の濃度で表示する。そして、(b2)第1の濃度で表示した対象地点について、指定位置が対象地点から遠ざかっている第2区間に、第1の濃度よりも薄い第2の濃度で表示する。または対象地点表示を表示部上から消す。
(もっと読む)
運転支援装置及びプログラム
【課題】追い越し動作に関する評価を行う運転支援装置及びプログラムを提供する。
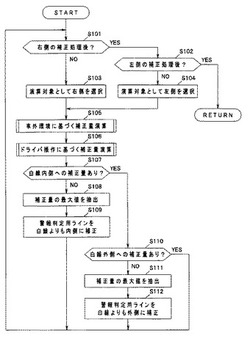
【解決手段】運転支援装置は、自車両の走行する第一の車線の前方を走行する他車両を検出し(S101:YES)、他車両が走行している道路を他車両が走行し続けると予測される場合(S102:YES)、当該他車両を対象車両として特定し(S103)、左側追い越し判定処理を行う(S104)。自車両2が、第一の車線よりも道路の中央寄りではない第二の車線に車線変更し、対象車両を追い抜き、所定時間内に対象車両の前方において第一の車線へ車線変更した場合、当該追い越し動作を危険動作と判定する(S106)。これにより、追い越し動作が適正でない場合には危険動作であると判定するので、追い越し動作を適切に評価することができる。
(もっと読む)
進路評価装置および進路評価方法
【課題】 走行効率を高いものとするとともに、他の物体との干渉を回避可能とし、走行効率と干渉回避との両立を図りながら移動体の進路を評価することができる進路評価装置および進路評価方法を提供する。
【解決手段】 進路生成部11は走行情報に基づいて自車両の予測進路を複数生成する。悲観進路生成部12で複数の予測進路について悲観進路を生成する。歩行者接近行動算出部13は、走行情報取得部2から送信された走行情報に基づいて歩行者接近進路を求める。悲観進路評価部14は、複数の悲観進路と歩行者接近進路とを比較し、各悲観進路についての悲観評価値を生成する。進路評価部15は、悲観評価値が最も高い予測進路を自車両の進路として決定する。
(もっと読む)
配信システム
【課題】一連番号を含むナンバープレート情報をアップリンクする。
【解決手段】配信システム100のセンター装置30は、制御部31は、車両Cの一連番号を含むナンバープレート情報を要求するセンター装置である旨を示す識別情報を通信部35に送信させる。車載器10は、記憶部3cにナンバープレート情報を記憶し、ナンバープレート情報を送信するか否かをセンター装置30から受信した識別情報に基づいて判断し、送信すると判断した場合、このナンバープレート情報をDSRC通信部3bに送信させる。
(もっと読む)
ドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置
【課題】長時間撮影を可能にしつつ、適切な記録画質を確保できるドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置を提供する。
【解決手段】走行時の経路案内を行うナビゲーション装置20と、走行時の車外の様子を記録する常時記録型ドライブレコーダ31とを備え、ナビゲーション装置20で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダ31の記録画質を変更するようにした。
(もっと読む)
運転情報記録装置および運転情報処理プログラム
【課題】 音声情報を生じさせた事象を自動的に解析することができ、音声を生じさせた事象の種類に応じて記録情報を分類することのできる運転情報記録装置および運転情報処理プログラムを提供することである。
【解決手段】 運転情報記録装置は、撮像部12と、画像記憶部13と、音声情報取得部14と、音声解析部16と、情報分類部17と、分類結果記録部18とを含んで構成される。撮像部12は、車両に搭載され、予め定める角度範囲に位置する対象を撮像する。画像記憶部13は、撮像部12によって撮像された画像情報を記憶する。音声情報取得部14は、車両に搭載され、周囲の音声情報を取得する。音声解析部16は、音声情報に含まれる音量情報の時間的変化を解析する。情報分類部17は、音声解析部16の解析結果に基づいて画像記憶部13に記憶された画像情報を分類する。分類結果記録部18は、情報分類部17による分類結果を記録する。
(もっと読む)
車両走行制御装置
【課題】走行パワーの推定値のバラツキが大きくなるような場合でも精度良く走行パワーの推定を行うことが可能な車両走行制御装置を提供すること。
【解決手段】走行予定経路を走行する場合に必要な走行パワーである必要走行パワーを、車両運転状態に関する動的情報に基づいて推定し、推定された必要走行パワーを発生させるように走行モードの切り替えを行う車両走行制御装置1において、動的情報に基づく必要走行パワーの推定値のバラツキが大きい場合に、走行予定経路における道路状態に関する静的情報に基づいて必要走行パワーを推定する。これにより、信号機の灯色情報などにより走行パワーの推定値(動的情報に基づく必要走行パワー)のバラツキが大きくなるような場合であっても、静的情報に基づいて必要走行パワーを推定することが可能となり、推定精度の向上が図られる。
(もっと読む)
進路評価装置
【課題】他車両のドライバの操作を配慮した進路を走行することが可能となり、より安全な交通環境を実現することができる進路評価装置を提供する。
【解決手段】進路評価装置60は、自車両81の進路候補a1,a2を生成する進路候補生成部61と、他車両82の進路b1,b2,・・・,b9を予測する進路予測部62と、自車両81の進路候補a1,a2と他車両82の予測進路b1,b2,・・・,b9との干渉状態を複数の干渉形態に分類する分類部63と、分類部63において分類された干渉形態に基づいて自車両81の進路を評価する進路評価部64とを備えている。
(もっと読む)
道路情報提供装置およびナビゲーション装置
【課題】運転者が配送時間や荷物への影響を考慮せずに安全に走行できるように、路面の凹凸状態を路面情報として情報提供を行うことが可能な道路情報提供装置およびナビゲーション装置を提供する。
【解決手段】道路利用者に道路情報を提供する道路情報提供装置において、車両Aを走行させたときの路面の凹凸状態を、その車両Aの位置情報および走行車線情報と共に路面情報として記憶する路面情報記憶部2と、任意の車両Bからの要求により、路面情報記憶部2に記憶された路面情報をその車両Bに送信する送信手段3とを備えたものである。
(もっと読む)
車両位置検知システム
【課題】駐車場内の空きスペースへの駐車を円滑に行う。
【解決手段】車両位置検知システム1において、携帯端末2は、駐車券発券機5の設置された駐車場の入口において駐車券の発券と同時に車両に提供され、清算機6の設置された駐車場の出口において車両から返却される。駐車場内にある車両には携帯端末2が搭載されるので、携帯端末2の位置が車両の位置として認識される。携帯端末2のディスプレイには、駐車場内における駐車区画及び車両の位置が表示される。基地局3は、見通しが利く範囲ごとに設置され、各携帯端末2が少なくとも1つの基地局3と通信可能にするとともに、携帯端末2との通信状態により当該携帯端末2の位置(方向と距離)を検知する。管理サーバ4は、各基地局3と通信可能であり、携帯端末2の位置データを受信し、駐車場内における各駐車区画及び各車両の位置を示す各階の配置図データを作成し、各階の基地局3にそれぞれ送信する。
(もっと読む)
無線通信装置およびこれを用いた車車間通信システム
【課題】PIAAが用いられる受信方式と用いられない受信方式の何れかを、状況に応じて適切に採用することが可能となる無線通信装置を提供する。
【解決手段】特定の周波数帯を用いて送信された所望信号を無線受信する無線通信装置であって、該特定の周波数帯に隣接した周波数帯についての受信電力を検出する受信状況検出部と、該検出の結果に基づいて、前記無線受信の方式を、PIAAが用いられるPIAA受信方式と、PIAAが用いられない非PIAA受信方式と、の何れかに設定する受信方式設定部と、を備えた無線通信装置とする。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
運転支援装置および運転支援システム
【課題】より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする。
【解決手段】道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している制限速度データベース27と、車両3の走行中の道路の道路条件情報を取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得て、当該制限速度の情報をもとに当該走行中の道路の制限速度を推定する制御装置26と、を備える。
(もっと読む)
運転支援装置、及びプログラム
【課題】簡易な構成で、ドライバの運転を安全な運転及び省燃費な運転に導く。
【解決手段】自車両1の速度を検出する車速センサ16と、周辺車両90と自車両1との間の車間距離D[m]を検出する車間距離センサ14と、予め定められた車間時間32aに対応する自車両1のドライバの心理状態が登録されたテーブル32及び予め定められた車間時間30aに対応する周辺車両90のドライバの心理状態が登録されたテーブル30を記憶したHDD18とを含んで構成し、検出された速度V[m/s]及び検出された車間距離D[m]に基づいて、車間時間T[s]を演算し(ステップ108)、演算された車間時間T[s]及びHDD18の記憶内容に基づいて、演算された車間時間T[s]に対応する自車両1のドライバの心理状態及び周辺車両90のドライバの心理状態を自車両1のドライバに報知するように制御する(ステップ110、112、114)。
(もっと読む)
細街路評価収集方法および装置並びに収集された細街路評価に基づく地図情報更新システム
【課題】細街路について、運転者が手動で逐一設定を行うことなく、個々の細街路ごとに、案内経路として選択されにくい度合いを示す評価を収集する。
【解決手段】細街路Rを走行する車両の挙動を検出する車両挙動検出手段40と、車両の所定の挙動に対応したパターンが記憶された記憶手段10と、車両挙動検出手段40によって検出された車両の挙動と記憶手段10に記憶された所定のパターンとを比較する挙動比較手段30と、挙動比較手段30による比較の結果、車両の挙動が所定のパターンに合致したときは、その細街路Rがナビゲーション用の案内経路として選択されにくい度合いを示す指標値であるコストCを増大させ、比較の結果、車両の挙動が所定のパターンに合致しないときは、コストCを増減させずにそのまま維持させることにより、個々の細街路RごとのコストCを収集する指標値収集手段20と、を備える。
(もっと読む)
車両の走行制御装置および車両の走行制御方法
【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行う。
【解決手段】リスク演算部は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部は、演算されるリスクに応じて、走行制御部による走行制御を抑制する。また、操舵反力調整部は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する。
(もっと読む)
運転支援装置
【課題】よりドライバーに違和感を与えずに運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】信号機の点灯状態に関する信号機情報を取得する通信装置104と、通信装置104が取得した信号機情報に基づいた最初のサービスを実行可能であり、最初のサービスの実行後に、信号機情報に基づいた後続のサービスを実行可能なインフラ協調ECU110とを備えた運転支援装置100において、インフラ協調ECU110は、第最初のサービス及び後続のサービスの内のいずれか一方を実行しないときは、もう一方のサービスも実行しないため、一部の種類の情報提供しかなされずに、期待していた他の種類の情報提供が行われないといったドライバーに違和感を与える事態を防止できる。
(もっと読む)
341 - 360 / 8,483
[ Back to top ]