
Fターム[5H180LL02]の内容
Fターム[5H180LL02]に分類される特許
81 - 100 / 1,853
車載照明装置、画像処理装置及び画像表示システム
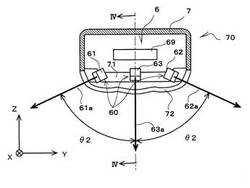
【課題】撮影を補助する複数の光源を簡便かつ低コストに車両に取り付ける。
【解決手段】車両の同一方向の側方領域を照明する3つの光源60が、同一のハウジング7内に光軸の方向が互いに異なる状態で固定されて収容される。これにより、3つの光源60がハウジング7によってサイドカメラユニット70として一体化される。このため、このサイドカメラユニット70を取り付けるのみで、複数の光源60を車両に一度に取り付けることができる。その結果、車両9の側方領域を広範囲に照明するための複数の光源60を、簡便かつ低コストに車両に取り付けることができる。
(もっと読む)
車線指示線検知装置

【課題】車線に沿って路面に描かれた車線指示線にICタグが配置されているときに、そのICタグに車線指示線を特定する情報を予め記憶させておくことなく車線指示線を検知することができる車線指示線検知装置を提供する。
【解決手段】路面20に配置されたICタグ5の車両1に対する相対位置が、送信部が所定の電波を送信してから受信部がICタグ5の発信波を受信するまでの時間に基づいて演算される。路面20の所定の範囲で検知された全てのICタグ5が少なくとも一つの集合に分類され、一つの集合に属するICタグ5のうち最も離間する2つのICタグ5,51及び5,52の距離が第2の所定距離以上であり、最も離間する2つのICタグ5を結ぶ直線53から一つの集合に属する全てのICタグ5までの距離がそれぞれ第3の所定距離以下である場合、一つの集合に属する全てのICタグ5が路面20に描かれた車線指示線22に含まれると推定される。
(もっと読む)
車両システム、交通システム
【課題】車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保する。
【解決手段】車両の走行速度が、車両が無停止で走行するための速度範囲内ではないと判断された場合には(S120:NO)、注意喚起を実行する必要があると判断し、減速支援を示す情報(車両が無停止で走行するための速度範囲)と注意喚起を示す情報(「後方注意」の文字)とをメータパネル本体21の表示領域21aに同時に表示させる(S125、S130)。このことにより、後方を走行する車両から急接近されないように運転者が注意して車両の減速を行うことができる。さらに、このような減速支援によってスムーズな減速が実行されることで、燃費向上効果が低減されない。したがって、車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保することができる。
(もっと読む)
車両用制御装置
【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
車両用注意喚起装置
【課題】注意喚起の仕方を工夫することにより、自車両が交差点付近の対象障害物に衝突しないようにする車両用注意喚起装置の提供。
【解決手段】運転者に交差点付近で注意を喚起する車両用注意喚起装置であって、自車両の走行位置を検出する走行位置検出手段と、上記自車両が右折または左折のために交差点に近づいてから右折または左折後に当該交差点を離れるまでの間、運転者に交差点付近への注意を喚起するために運転者に視覚刺激を与える視覚刺激手段と、上記自車両の走行位置に応じて、上記視覚刺激手段の刺激強度を異ならせる刺激制御手段とを備える。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、緊急車両が接近している場合に自車両を自動的に減速させるとともに、四輪車の場合にはアクセルペダルの踏み込み、二輪車の場合にはスロットルグリップの回転を制限させて、運転者に操作の違和感をなくすることにある。
【解決手段】制御手段(16)は、車車間通信手段(6)により緊急車両(3)の接近を検出する緊急車両検出手段(17)を備えて、この緊急車両検出手段(17)により緊急車両(3)が自車両(1)に接近することを検出した時に車速検出手段(8)により検出された車速が予め設定された値を超える場合には反力付与手段(11)を作動させて操作力調節手段(13)を調節して予め設定された車速になるように制御する。
(もっと読む)
通知装置
【課題】無線装置の搭載の有無に関係なく、車両の接近を通知する技術を提供する。
【解決手段】通知装置10は、交差点を中心としたエリア内に設置される。アンテナ60、無線部62、FFT部64、復調部66は、車両に搭載された無線装置からの信号を受信する。検出部68は、受信した信号をもとに、車両が交差点に接近していることを検出する。通知部70は、検出した接近に関する情報を通知する。取得部72は、通知装置10が設置された交差点とは別のエリアに設置された信号機の点灯色に関する情報を取得する。通知部70は、車両の接近を検出した場合であっても、取得した情報に含まれた点灯色によっては、通知を延期する。
(もっと読む)
駐車支援装置
【課題】駐車支援性能を向上する駐車支援装置を提供する。
【解決手段】CPU12pは、車両の周辺を捉えるカメラC_1〜C_4から出力された被写界像を繰り返し取り込み、取り込まれた被写界像に基づく車両周辺画像を運転席のモニタ画面に再現する。駐車指示を受け付けると、CPU12pは、被写界像に基づいてハンドル16swの回転量を調整し、このような調整処理と並列して車両の周辺から発見された障害物の移動経路を予測し、そして予測された移動経路をモニタ画面に再現する。
(もっと読む)
走行区分線検出装置
【課題】走行区分線の検出誤差が増大することを防止し、走行区分線を的確に検出する。
【解決手段】走行区分線検出装置10は、車載カメラ11から出力された画像データ(原画像)に対して、車両からの距離に応じた走行路上の走行区分線の所定寸法に相当する大きさを有するカーネルを用いた画素値の畳み込み演算により低コントラスト画像を生成するフィルタ処理部22と、画像データ(原画像)と低コントラスト画像との差分に基づき走行区分線を検知する走行区分線検知部25とを備え、フィルタ処理部22は、注目点設定部21により設定された注目点の位置から第1方向に所定距離だけ変位した位置を中心位置とする第1カーネルを用いて第1低コントラスト画像を生成する第1フィルタ処理部31と、注目点の位置から第2方向に所定距離だけ変位した位置を中心位置とする第2カーネルを用いて第2低コントラスト画像を生成する第2フィルタ処理部32とを備える。
(もっと読む)
車両制御装置
【課題】誤制御を抑制しながらも、車線逸脱防止の適用範囲を拡大する車両制御装置を提供する。
【解決手段】自車前方の画像を撮像する車載カメラ600と、複数の車両制御方法から1つの車両制御方法を決定し、決定された車両制御方法でアクチュエータを制御するECU610と、を有し、車載カメラは、撮像し、取得した画像と認識したレーンに基づいて複数のエリアに分割し、分割されたエリア毎に信頼度を算出し、エリア別信頼度情報を出力するエリア別信頼度算出部400を有し、ECUは、エリア別信頼度情報に基づいて車両制御方法を決定する車両制御部500を有する車両制御装置。
(もっと読む)
車両の走行安全装置
【課題】衝突の可能性がある移動物体ごとに報知が運転者に発せられるので、報知が頻繁に行われることに起因する運転者へのわずらわしさを軽減する。
【解決手段】車両の周辺の物体を検出し、検出された物体のうち、該車両の進行経路に接近してくる移動物体を判定し、該判定された移動物体について、該車両と衝突の可能性があると判定された場合に、自車両の運転者に報知を行う走行安全装置が提供される。該判定された移動物体が複数ある場合には、該複数の移動物体を、該移動物体の数以下のグループに編成し、上記の衝突の可能性の判定は、該編成されたグループのそれぞれについて行われ、報知は、該衝突の可能性があると判定されたグループのそれぞれについて、1回だけ行われる。したがって、自車両に接近してくる移動物体が複数存在しても、該移動物体のグループごとに報知が運転者に発せられるので、わずらわしさを軽減することができる。
(もっと読む)
路車間通信システム、及び車載用装置
【課題】交差する道路の各方向に異なる内容の情報を伝達することが可能であるとともに、車両の進入角度に応じた情報の伝達が可能である路車間通信システムを提供する。
【解決手段】本発明の路車間通信システムは、車載用装置を搭載した車両と、路側機とを含んでいる。路側機が備える送信制御部は、車両の進入角度に応じて車両へ伝達する情報である伝達情報を生成する。そして伝達情報に対応する進入角度と伝達情報とを関係付けた関係情報を生成して送信する。車載用装置が備える受信制御部は、この電波を受信するよう電波受信装置を制御する。また車載用装置が備える角度算出部は、路側機が設けられた道路に対する車両の進入角度を、GPS装置を用いて算出する。また車載用装置が備える情報抽出部は、受信電波に含まれる関係情報を取得し、角度算出部により進入角度を算出し、算出された進入角度に関係付けられている伝達情報を関係情報より抽出する。
(もっと読む)
走行支援装置
【課題】ステアリング及びブレーキによる車線逸脱防止制御中のドライバの操舵介入に対しては違和感のない逸脱防止制御を行うことはできない。
【解決手段】自車が車線からの逸脱しそうな場合又は自車が周囲障害物と衝突しそうな場合に、ブレーキ制御装置によるヨーモーメント又はステアリング制御装置のアシスト操舵トルクの少なくとも一つを制御し、自車の車線からの逸脱又は自車の周囲障害物との衝突を防止する制御装置であって、ステアリングのハンドル舵角,ドライバの操舵トルク及びアシスト操舵トルクの少なくとも一つに基づきドライバの操舵意思を検出し、ドライバの操舵意思を妨げないようにヨーモーメント又はアシスト操舵トルクの少なくとも一つを抑制する。
(もっと読む)
車両の走行安全装置
【課題】見通しの悪い交差点等において、その見通しの良否に応じて、警報を作動させるタイミングを変更する。
【解決手段】運転者の位置よりも車両の前部に配置され、該車両の周辺の物体を検出し、検出された物体のうち、該車両近傍に接近してくる移動物体について、該車両と衝突の可能性があると判定された場合に、該車両の運転者に報知を行う走行安全装置が提供される。ここで、検出された移動物体の方向を車両の運転者が見通すことのできる角度を、第1の見通し角度として算出する。該第1の見通し角度に基づいて、運転者への報知のタイミングを変更する。運転者が見通すことのできる角度に基づいて報知のタイミングを変更することができるので、見通しが悪いほど、報知のタイミングを早めることができる。よって、衝突回避のための動作をより的確なタイミングで運転者に促すことができる。
(もっと読む)
車両用警報装置
【課題】無用な警報提示による煩わしさを軽減できる車両用警報装置を提供する。
【解決手段】警報提示手段1が警報提示を行っているときに、把持力検出手段1が、ステアリングホイール4を把持する把持力の変化を検出すると、制御手段が、運転者が警報提示を認識し把持力が変化したと判断して、警報提示手段1の警報提示の制御を変更し、例えば警報提示を停止したり弱めることによって、運転者が警報提示を認識した時点からの無用な警報提示による煩わしさを軽減する。
(もっと読む)
センサコントローラ、ナビゲーション装置、センサ制御方法
【課題】 従来、ナビゲーション装置では、カメラ等のセンサを複数用いて、車両の周囲の情報を検知し、運転者の運転を支援する技術があるが、複数のセンサによる検知結果を用いて複雑な演算処理を行うために、処理負荷が高くなり、即応性が必要な他の処理が遅延してしまうこともある。そのため、センサで検知した情報について、処理範囲を一律に縮小させることで、演算処理量を減らして処理負荷を下げることが考えられている。しかし、一律に処理範囲を縮小すると、運転支援に必要な情報が得られないことがある。
本発明の目的は、運転の支援に必要な情報をより適切に得るセンサ制御技術を提供することにある。
【解決手段】
本発明のセンサコントローラは、車両の走行状況に応じて、センサにより取得した情報の処理範囲を変更させて所定の処理を行うことを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】俯瞰映像上の障害物を強調して表示し、前記俯瞰映像上で歪んで表示される障害物の把握を容易にした車両周辺監視装置を提供すること。
【解決手段】一定の時間間隔ごとに俯瞰映像を取り込み、特徴点抽出処理部3において特徴点Pを抽出する。そして、前記抽出した特徴点Pの動きを特徴点追跡処理部4において追跡処理する。この特徴点Pの追跡処理では、特徴点Pのオプティカルフローを計算することでその動きベクトルを求める。次に、三次元計測処理部5において俯瞰映像上の特徴点Pの位置の変化から自車両と特徴点Pとの相対運動情報と、前記特徴点Pの三次元座標情報を算出する。さらに、前記算出した前記相対運動情報と前記三次元座標情報とから障害物検知処理部6において障害物を検知し、前記検知した障害物を含む前記俯瞰映像上の領域を強調領域描画処理部8において決定し強調し、表示部10により表示出力する。
(もっと読む)
交通渋滞抑止補助装置および方法
【課題】先頭車が低速、停止を余儀なくされた原因が解消して発進した後も、後続車が引き続きより長く低速、停止を余儀なくされる交通渋滞を最小限に抑止する。
【解決手段】 車1の前部に設けられた車間距離測定装置3が、車1と前方を走る車2との間の車間距離を測定し、車1と車2の車間距離が、車1の加速性能に基づき予め設定された一定距離以下になったら、判定装置4が車1の警報装置5を動作させる。渋滞の原因は、低速走行中または停車する際に前車との車間距離を詰めてしまい発進時に車間距離を復活するための時間遅れに起因するので、本発明は、警報を低速走行中及び停車中にも発する。
(もっと読む)
車両の走行状態制御装置、および車両の走行状態制御方法
【課題】制御時における演算量の増大を抑制すること。
【解決手段】まず、自車両に設定した基準部分を通って車幅方向に延びる直線よりも自車両前方側の並走エリアに存在する他車両を並走対象として選択する。続いて、自車両が、並走対象として選択した他車両と並走するように自車両の走行状態を制御する。そのため、並走対象として選択した他車両の走行状態、つまり、限られた他車両の走行状態をもとに、自車両の走行状態を制御する。それゆえ、例えば、自車両の周囲に他車両が複数台ある場合にも、それら複数台の他車両のうちの限られた他車両の走行状態を演算処理すれば済む。その結果、演算量の増大を抑制できる。
(もっと読む)
車両用障害物検出装置
【課題】カメラで撮影した複数の画像を用いて、障害物とそれ以外の領域を識別可能な俯瞰視点の状況図を自己生成する車両用障害物検出装置を提供する。
【解決手段】車両の周囲を撮影可能な撮像部と、撮像部で撮影した車両周辺の画像に含まれる障害物を検出する障害物検出部と、撮影部で撮影した車両周辺の画像を所定の仮想視点から見た俯瞰画像に変換して出力する俯瞰画像生成部と、俯瞰画像に含まれる障害物画像と障害物以外の画像とを識別可能な画像に変換し、車両の周辺の状況を表す俯瞰視点の状況図を作成する状況図生成部と、状況図を表示する表示部と、を具備する。
(もっと読む)
81 - 100 / 1,853
[ Back to top ]