
Fターム[5H180LL02]の内容
Fターム[5H180LL02]に分類される特許
41 - 60 / 1,853
自動駐車装置
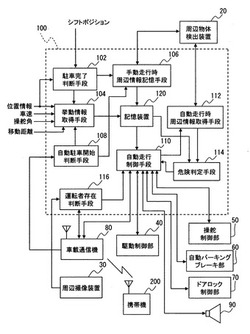
【課題】インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供する。
【解決手段】車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段102と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段108と、車両の挙動情報を、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまで逐次取得して、記憶装置120に記憶する挙動情報取得手段104と、自動駐車開始条件が成立した場合に、記憶装置120に記憶されている挙動情報に基づいて、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に車両を自動走行させて、車両を前記駐車完了位置まで移動させる自動走行制御手段110とを備える。
(もっと読む)
駐車支援装置

【課題】車両を後退させて駐車する際に適切な駐車支援を行うことができる駐車支援装置を提供する。
【解決手段】 駐車支援装置のECUは、GPSにより検出された車両位置座標と地磁気センサにより検出された車両前後方位とを読み込み、これらの車両位置座標及び車両前後方位に基づいて車両前後方向と車両進行方向との角度差δを算出する。そして、ECUは、角度差δの絶対値が所定差分閾値A2よりも大きいときは、ガイド線表示フラグをOFFにし、角度差δの絶対値が所定差分閾値A1以上であり且つ所定差分閾値A2以下であるときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをONにし、角度差δの絶対値が所定差分閾値A1よりも小さいときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをOFFにする。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
交差点車両警告装置
【課題】交通渋滞の交差点に所定速度以上の二輪車が入ってくる状況で、対向車線から右折する車両に警告を発交差点車両警告装置を提供すること。
【解決手段】一例の交差点車両警告装置は、ある車線で交差点に進入し右折する右折車両を検知する右折車両検知手段と、前記車線に対向する車線を走行し前記交差点に進入する車両を撮影して画像を得る走行画像取得手段と、この走行画像取得手段により得られた画像から走行車両の渋滞状況を把握する渋滞状況把握手段と、この渋滞状況把握手段により渋滞が検知されたとき、前記走行画像取得手段により得られた前記画像から二輪車を検知し、検知された二輪車の速度が所定二輪車速度以上であるかを判定する二輪車速度判定手段と、この二輪車速度判定手段により前記二輪車の速度が所定二輪車速度以上と判定されたとき、前記右折車両に警告を送信する警告送信手段と、を有する。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
障害物検出装置
【課題】様々な姿勢が予想される一般に困難である人等の検出対象物体の検出が、その動静や姿勢にかかわりなく高精度に検出することが可能な障害物検出装置を提供する。
【解決手段】時間的に連続する画像を取り込む画像取得部101と、画像について主に動体を検出するモーションベース検出部120と、画像について主に静物を検出する非モーションベース検出部120と、を有し、非モーションベース検出部は、画像の任意の所定領域(車両幅分の前、または後ろ)のみを対象とし、モーションベース検出部は、画像の所定領域より広い範囲を検出対象とする。
(もっと読む)
車両の報知装置
【課題】カーナビゲーションシステムを搭載していない車両であっても方向指示器の出し忘れを予防することができる車両の報知装置を提供する。
【解決手段】車両の方向指示器の作動を検出する作動検出手段11と、車両の速度を検出する車速検出手段12と、車両のステアリングの操舵角を検出する操舵角検出手段13と、少なくとも速度検出手段12及び操舵角検出手段13の検出結果に基づいて車両の走行状態を判別すると共にその判別結果と作動検出手段11による検出結果とに基づいて方向指示器が車両の走行状態に応じて適切に作動しているか否かの判定を行う適切作動判定手段21と、適切作動判定手段21によって方向指示器が車両の走行状態に適切に作動していないと判定された場合に、運転者に対して方向指示器の適切な作動を促す報知を行う報知手段22と、を備える構成とする。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
車両接近警告送信装置、車両接近警告受信装置および車両接近警告システム
【課題】聴覚障害者にも有効な車両接近警告送信装置、受信装置を提供すること。
【解決手段】車両接近警告送信装置は、車両において、LEDを用いた前照灯などの外部に光を放射する発光手段、断続的に所定の変調信号を生成する信号生成手段、変調信号に基づいて発光手段の点灯、消灯を制御する制御手段とを備える。受信装置は、変調光を受光する光センサー手段、復調手段、変調信号の有無を判定する判定手段、変調信号が検出された場合に音声出力手段、振動出力手段、有線出力手段、無線出力手段の内の少なくとも1つの手段で情報を出力する出力手段を備える。また、無線出力信号を受信し、振動出力を発生させる子機を備えてもよい。聴覚障害者であっても車両の接近を認識することができる。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
船舶の着岸支援装置
【課題】船舶の着岸が不慣れな者でも、理想の着岸軌跡に沿って着岸できるように指示を行う船舶の着岸支援装置を提供する。
【解決手段】特定の港へ入港する船舶のための着岸支援装置であって、
該港への入港時から該着岸目標位置までの軌跡を記録する記録装置を設け、該軌跡に沿うように操船者に操船指示を行う。前記軌跡から、任意の範囲を定めたアプローチ範囲を定め、船舶が該アプローチ範囲から外れている場合は操船者に最終アプローチ開始地点へ移動するよう指示を行う。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
車両用運転支援装置
【課題】地理的な対象物の探索に関して、処理速度と検出精度とを高めることができる車両用運転支援装置を提供する。
【解決手段】前方監視カメラ3、GPS4、ジャイロセンサ5、制御ユニットUを利用して、ナビゲーション装置6が保有する三次元地図データとしてのボクセルBを抽出すると共に、そのボクセルBのうちから、区画線23等を含むものを抽出し、それらを前方監視カメラ3が撮影した撮影画像に組み込む。そして、その撮影画像21全域ではなく、その撮影画像21のうち、区画線23等を含むボクセルBについてのみ、区画線23等の検出処理を行う。これにより、探索領域(検出範囲)を少なくする。
(もっと読む)
レーザー距離計とレーザーカメラを使用した艦船の海上衝突予防用補助監視装置
【課題】艦船が入出港時や他船で混み合う狭水道等を航行中、他船等の監視に対し船首中央から左右対称の一定角度内に限定した追加の監視手段を提供する。
【解決手段】船首最先端中央(下部)の船体に凹み又は追加の構造物を作り左右対称で放射線状にレーザービームが発射出来るように複数個のレーザー距離計を取り付け、支柱を常時往復移動させることでレーザービーム間の死角を無くすようにする。レーザービームの反射により得られた他船等との方位と距離を操船場所に表示、警報する。並行してレーザーカメラを同じ船首に固定装備し、船首前方を動画で撮影しその画面を同じ操船場所に表示する。両者の表示、警報及び映像を提供することで操船者に衝突回避の動作を起こさせるための艦船の海上衝突予防用補助監視装置。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車線毎の規制の内容が不規則或いは頻繁に変動する道路区間においても、車両が現在走行する車線から他の車線へと進入する場合に、車線毎の規制の内容に応じて警告することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車両の周囲の道路上に設置された車線区分構造物を検出し(S3)、検出された車線区分構造物が車両の進入可能な間隔を隔てて連続して設置されている場合に、該間隔を形成する各車線区分構造物の座標に基づいて、各車線区分構造物の間を結ぶ仮想線を設定するとともに(S7)、設定された仮想線を自車両が越えると判定された場合に警告を行う(S11)ように構成する。
(もっと読む)
車両前方監視装置
【課題】車両前方の監視体制の継続性、連続性を維持することが可能な車両前方監視装置を提供する。
【解決手段】車両前方監視装置は、狭角カメラ、広角カメラ、物体相対距離Dfwに応じて狭角画像情報Dn及び広角画像情報Dwの何れか一方を処理用画像情報として選択する画像情報選択部、処理用画像情報を用いて画像処理を行い自車両前方に存在する前方物体を検出する画像処理部、自車両の進行予定方向Dcpに対する狭画角中心線方向Dclのずれを検知する方向ずれ検知部を備える。画像情報選択部は、方向ずれ検知部により進行予定方向Dcp及び狭画角中心線方向Dclのずれが検知された場合、物体相対距離Dfwに応じて選択すべき処理用画像情報が狭角画像情報Dnである場合においても広角画像情報Dwを選択する。
(もっと読む)
停止線認識装置
【課題】過大な演算負荷を発生させることなく、自車両の制御に必要な停止線を精度良く認識することができる停止線認識装置を提供する。
【解決手段】画像処理ユニット4は、自車走行路前方の信号機の認識を行い、自車走行路上の直前の信号機が設定距離L2以内の位置に存在し且つその信号機が赤信号であることを認識したとき、停止線認識モードへと移行して停止線の認識処理を実行する。これにより、不要な場面での停止線認識処理の実行を的確に排除することができる。従って、過大な演算負荷を発生させることなく、自車両1の制御に必要な停止線を精度良く認識することができる。
(もっと読む)
車両制御装置
【課題】十分な安全性を確保しつつも、状況に応じて運転者の運転感覚に沿った制御を行うことのできる車両制御装置を提供する。
【解決手段】逸脱角度θに対する目標逸脱角度θ´を演算する目標逸脱角度演算部16が、白線WLと障害物B1との間の逸脱余裕距離Dに基づいて目標逸脱角度θ´を演算する。白線WLと障害物B1との間の逸脱余裕距離Dは、白線WLを越えた場合に自車両M1と障害物B1との間にどの程度の余裕があるのかを示している。当該逸脱余裕距離Dに基づいて、安全性を確実に確保できる範囲で目標逸脱角度θ´を演算しておけば、何らかの理由で逸脱角度θが増加する動作をするとしても、目標逸脱角度θ´を満たす範囲において、ある程度許容することができる。これによって、制御量が過剰に介入してしまうことを抑制することができる。
(もっと読む)
道路認識装置
【課題】車両前方の撮像画像中から車線や横断歩道をリアルタイムで検出可能であり、横断歩道までの距離や横断歩道の距離方向の幅を検出可能な道路認識装置を提供する。
【解決手段】道路認識装置1は、自車両前方を撮像する撮像手段2と、画像T上の水平ラインj上を探索して車線候補点cr、clを検出する車線検出手段10と、車線候補点crに対応する車線の横幅が横断歩道の横幅に相当する横幅であった場合には、当該水平ラインjの探索領域Slを拡大し、当該水平ラインj上で輝度の繰り返しパターンが存在するか否かを判断するパターン探索手段11と、繰り返しパターンが存在する各水平ラインjをグループ化するグループ化手段12とを備え、グループ化手段12は、グループ化したグループの最も手前側の位置までの距離Znearを横断歩道までの距離Zcとして算出し、グループの実空間上の距離方向の幅Wzを横断歩道の幅Wczとして算出する。
(もっと読む)
41 - 60 / 1,853
[ Back to top ]