
Fターム[5H180LL02]の内容
Fターム[5H180LL02]に分類される特許
61 - 80 / 1,853
車載装置および認知支援システム
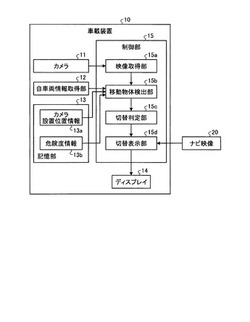
【課題】危険物体に対するドライバーの警戒感を維持しつつ、ドライバーの死角から自車両に接近する移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】車両の周辺映像を車載装置が撮像した映像を取得し、自車両の走行状態を示す自車両情報に基づき、周辺映像から自車両に接近する移動物体を車載装置が検出し、表示部へ入力される複数系統の映像を車載装置が切り替え、移動物体が検出された場合に、周辺映像への切替を車載装置が指示するように構成する。
(もっと読む)
運転支援装置

【課題】タイヤの走行予測軌跡を認識できる運転支援装置を提供する。
【解決手段】車両が後退する際に運転者を支援する運転支援装置であって、車両の後方画像を撮像するカメラと、自車両の操舵角を検出する操舵角検出部と、操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を後方に延長したタイヤ幅の軌跡の画像を生成し、カメラが撮像した後方画像にタイヤ幅の軌跡の画像を重ねた画像を生成する表示処理部と、表示処理部が生成した画像を表示する表示部と、を備える運転支援装置とする。
(もっと読む)
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
(もっと読む)
方向転換支援装置及び方法
【課題】車両の方向転換が可能か否かを運転者が精度良く判断可能なように支援する技術を提供する。
【解決手段】自車両の周囲を撮影した画像を取得し、前記画像を変換して俯瞰画像を生成し、自車両が最小回転半径で走行した場合の最小軌道を求め、自車の舵角を検出した舵角情報を取得し、前記舵角情報が示す舵角で自車が走行した場合の予想軌道を求め、前記最小軌道と前記予想軌道を前記俯瞰画像情報と重畳して表示装置に表示させる。
(もっと読む)
操縦支援装置
【構成】カメラC_3は、車両に設けられて斜め上方向から地面を捉える。CPU16は、カメラC_3から出力された被写界像P_3を地面に対する鳥瞰画像に変換し、車両の前後方向の姿勢を定義するべく地面に描かれた複数の直線を表す線画像を鳥瞰画像から探索する。発見された線画像に現われた複数の線の平行性がエラー条件に合致する場合、CPU16は、バックギアの選択に応答して表示装置22に表示されるキャラクタ画像を点滅させる。
【効果】鳥瞰変換特性の異常に起因する事故を抑制することできる。
(もっと読む)
車線逸脱防止支援装置
【課題】自車両の左右いずれか一方の側にしか車線区画線を検出できない場合であっても、車線逸脱防止支援を正確に行うことができる車線逸脱防止支援装置の提供。
【解決手段】自車両の斜め前方を含む前方を撮像する撮像手段と、撮像手段により撮像された前方画像に基づき、車線区画線を検出する車線区画線検出手段と、車線区画線検出手段により検出された車線区画線と自車両の位置関係に基づき、自車両の車線逸脱防止を支援する支援手段と、車線区画線検出手段により左右いずれか一方にのみ車線区画線が検出された場合、検出された車線区画線と自車両との距離が所定値未満であるかどうかを判定する判定手段と、判定手段により距離が所定値未満であると判定された場合、支援手段を休止モードから支援可能モードに移行させ、距離が所定値以上であると判定された場合、支援手段を休止モードのまま維持するモード設定手段とを備える。
(もっと読む)
車両表示装置および表示方法
【課題】 後方画像に死角が生じていることを知らせることができる「車両表示装置および車両表示方法」を提供する。
【解決手段】 本発明の車両表示装置は、車両後方を撮像しその後方画像を表示するものであって、車両の後方を撮像する撮像カメラ110と、撮像カメラからの撮像データに基づき後方画像をディスプレイ140に表示可能な出力制御部130と、撮像データに基づき自車が斜め駐車されたか否かを判定する駐車方向判定部132と、斜め駐車と判定されたとき後方画像において死角が生じる方向を判定する死角方向判定部134とを有する。出力制御部130は、斜め駐車と判定されたとき、死角方向判定部の判定結果に基づき死角が生じることおよび死角の方向を知らせる表記210、220を、後方画像200上に合成して表示させる。
(もっと読む)
経路作成装置
【課題】演算時間と精度の双方を考慮して適切な走行経路を作成すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、少なくとも開始点を含むノードの群のうちの一点からステップサイズで示される距離内に存在する新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部17bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいてステップサイズを決定するステップサイズ決定部17aと、を備えることを特徴とする。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
半導体集積回路およびその動作方法
【課題】道路白線の近傍を白い車両が走行している場合等において、道路白線の位置認識精度の低下を軽減する。
【解決手段】半導体集積回路1は、特に3次元画像処理機能14を具備する。映像入力装置10は、カメラ2で撮影される車両前方空間の映像信号を画像メモリ3に格納する。3次元画像処理機能14は画像メモリ3の前方空間の3次元遠近画像を平面視2次元画像に変換して、画像メモリ3に格納する。画像処理ユニット11、12は、画像メモリ3の平面視2次元画像の1フレームの濃度累積処理により道路白線を認識する。道路白線の認識後、表示装置4の画面に表示される表示画像データに認識された前記道路白線としての表示直線を描画する。映像出力装置13は、表示直線が描画された画像メモリ3の表示画像データを、表示装置4の画面に表示する。
(もっと読む)
車両の衝突を回避するための装置
【課題】自車両の移動物体の進行経路までの距離をより良好な精度で推定して衝突可能性の判定精度を向上させる。
【解決手段】車両の周辺の物体を検出し、検出された物体のうち、該車両の進行経路に向けて接近してくる移動物体を判定する。移動物体の進行経路に沿って存在する白線および縁石の少なくとも一方を検出する。車両から、該検出された白線および縁石の少なくとも一方までの第1の距離dlに基づいて、該車両から該移動物体の進行経路までの距離dtを推定する。推定した距離dtに基づいて、車両が移動物体と衝突する可能性を判定し、該衝突の可能性の判定結果に基づいて、衝突回避のための動作を発動する。
(もっと読む)
衝突回避支援装置、および衝突回避支援プログラム
【課題】自車両が車線変更する際に他車両と衝突しないように支援を行う衝突回避支援装置において、車線変更時の運転者の負担をより軽減できるようにする。
【解決手段】衝突回避支援システムにおいては、自車両が現在の速度のまま車線変更する際に必要となる等速変更領域として設定するとともに、自車両が加速してから車線変更する際に必要となる加速変更領域、および自車両が減速してから車線変更する際に必要となる減速変更領域を設定する(S210)。そして、各変更領域設定手段が設定した各領域のうち、他車両が存在しない領域を抽出する(S230)。さらに、他車両が存在しない領域が存在しない場合、車線変更すると危険であると判断し、等速変更領域に他車両が存在しない場合、現在の速度のまま車線変更可能と判断し、加速変更領域または減速変更領域に他車両が存在しない場合、加速または減速すれば車線変更可能と判断する(S150)。
(もっと読む)
幹線路合流情報提供システム
【課題】合流地点近くの側路にいる車両が適切かつ円滑に幹線路の流れに合流することが可能な、合流情報提供システムを提供すること。
【解決手段】本発明の幹線路合流情報提供システムは、側路と合流する幹線路上に設けられた2つのカメラにより合流地点へ向かう走行物体の時系列画像を取得し、この時系列画像上で垂直位置と前記監視領域の平面上での視差との関係を表す視差プロファイルを計算する。この視差プロファイルに基づいて、カメラから得られる画像に複数の処理領域を設定し、設定された複数の処理領域から検出された走行物体の大きさの変化、複数の処理領域の間隔から走行物体の速度を算出する。
算出された走行物体の速度から幹線路の状態情報を検知し、側路上に車両に対して表示する。
(もっと読む)
接近物検知装置、接近物検知システム、および、接近物検知方法
【課題】車両がイグニッションOFFの状態であっても、車両に乗車している乗員の全員が降車を完了するまで車両への接近物検知を行うことを可能とする技術を提供する。
【解決手段】車両が停止した状態で、車両に搭載されたカメラで得られた撮影画像に基づいて、車両に接近する接近物を検知する。そして車両をイグニッションOFF状態とした場合でも乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行い、乗員検知手段により車両内に乗員が検知されない場合は接近物の検知を終了する。これにより、車両をイグニッションOFF状態とした場合でも、乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行うことで、車両から乗員が全員降車するまで接近物の検知を行える。
(もっと読む)
車両周辺画像提供装置
【課題】トップビュー画像のつなぎ目と交差するガイドラインを違和感なく表示させることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、複数のカメラと、車両の画像のデータを予め格納する第1の記憶手段と、車両の幅及び車両からの所定の距離を示すガイドラインのデータを記憶する第2の記憶手段と、第1の記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段とを備える。制御手段は、各カメラにより取得された画像間の境界領域に表示されるつなぎ目と交差するガイドラインを表示するとき、ガイドラインの表示位置の画素と表示位置に隣接する画素との輝度差に応じて現れる滲みを含めたガイドラインの表示がつなぎ目の両側でずれのないようにガイドラインの表示位置を調整する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、自車両と衝突する可能性があるものがあるか否かを正確に把握し、運転者が不要な警報を受けることがないようにすることにある。
【解決手段】制御手段(3)は、衝突可能性判定手段(3C)により衝突する可能性があると判定された対象物を運転者(P)が認識したか否かを判定する認識判定手段(3D)を備え、この認識判定手段(3D)により対象物を運転者(P)が認識したと判定された場合に警報手段(9)から警報を出力しないように制御する。
(もっと読む)
車両周囲表示装置、車両周囲表示方法
【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
カメラ撮影画像表示装置
【課題】車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行う「カメラ撮影画像表示装置」とする。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
(もっと読む)
車両用警報装置
【課題】車両と人間との接触を確実に回避することが可能な車両用警報装置を提供する。
【解決手段】車両用警報装置10は、スピーカ12と受信部13と物体検知部15と出力制御部16とを備える。スピーカ12は、車両1の外部へ超音波と可聴音波とを出力可能である。受信部13は、スピーカ12が出力した超音波の反射波を受信する。物体検知部15は、受信部13が受信した反射波に基づいて車両の周囲の所定範囲の物体を検知する。出力制御部16は、物体検知部15が物体を検知したときに、スピーカ12から可聴音波を出力させる。
(もっと読む)
61 - 80 / 1,853
[ Back to top ]