
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
221 - 240 / 2,931
交差点警告装置
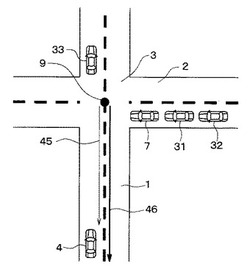
【課題】自車両が交差点から起動距離内に入ったときに警告を行うためのアプリケーションを実行する交差点警告装置において、車両の混雑度に応じて起動距離を適切に制御する。
【解決手段】他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、自車両の周囲の車両7、31、32の混雑度が高いほど、起動距離を長くし、混雑度が低いほど、起動距離を短くする。
(もっと読む)
車両の走行制御装置および車両の走行制御方法

【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行う。
【解決手段】リスク演算部は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部は、演算されるリスクに応じて、走行制御部による走行制御を抑制する。また、操舵反力調整部は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する。
(もっと読む)
運転支援装置、及びプログラム
【課題】簡易な構成で、ドライバの運転を安全な運転及び省燃費な運転に導く。
【解決手段】自車両1の速度を検出する車速センサ16と、周辺車両90と自車両1との間の車間距離D[m]を検出する車間距離センサ14と、予め定められた車間時間32aに対応する自車両1のドライバの心理状態が登録されたテーブル32及び予め定められた車間時間30aに対応する周辺車両90のドライバの心理状態が登録されたテーブル30を記憶したHDD18とを含んで構成し、検出された速度V[m/s]及び検出された車間距離D[m]に基づいて、車間時間T[s]を演算し(ステップ108)、演算された車間時間T[s]及びHDD18の記憶内容に基づいて、演算された車間時間T[s]に対応する自車両1のドライバの心理状態及び周辺車両90のドライバの心理状態を自車両1のドライバに報知するように制御する(ステップ110、112、114)。
(もっと読む)
出会い頭衝突防止支援装置
【課題】自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御する。
【解決手段】出会い頭衝突防止支援装置は、他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、車両4の周囲の車両の混雑度が高いほど、情報提供範囲を狭くし、混雑度が小さいほど、情報提供範囲を広くする。
(もっと読む)
車両周辺監視装置
【課題】車両の外界を撮像して得た画像から対象物を検出する際にピッチングに起因する位置ずれを適切に補正する。
【解決手段】車両周辺監視装置10は、外界カメラ11から出力された画像上における対象物の上下方向位置の時間変化に基づきピッチング補正値を算出する補正値算出部24と、ピッチング補正値によって画像上における対象物の上下方向位置を補正するピッチング補正部25とを備え、車両の水平状態を基準として車両前部が上昇する方向を正かつ下降する方向を負とし、基準からの車両前部の上昇および下降の大きさと、大きさの変化量とを所定タイミング毎に順次検出する上下動検出部22と変化量検出部23とを備え、補正値算出部24は、上下動検出部22と変化量検出部23とにより所定期間内に検出された各検出値の積算値に基づきピッチング補正値を算出する。
(もっと読む)
安全運転支援システム及び車載器
【課題】車両運行状態に応じた安全運転支援情報を適切かつ確実に配信することができる安全運転支援システム及びこれに用いる車載器を提供する。
【解決手段】車載器300が、路側DSRC通信装置200から配信された配信情報のうち、自車両が光ビーコン通信エリアを通過した路側光ビーコン装置100から受信した通知データ及び自車両の運転状況に応じて配信情報を選択して運転者に提示する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
無線装置
【課題】衝突事故の防止と早期の原因究明と実現しながらも、処理量の増加とコストの増加とを抑制する技術を提供する。
【解決手段】取得部62は、車両に関する情報を取得する。生成部64は、取得した情報を格納するようにパケット信号を生成する。変復調部54、RF部52、アンテナ50は、生成したパケット信号を送信するとともに、他の車両に搭載された無線装置からのパケット信号を受信する。通知部70は、受信したパケット信号を処理する。記憶部86は、受信したパケット信号と、生成したパケット信号とを記憶する。
(もっと読む)
安全運転支援システム及び車載器
【課題】車載器側に高性能な情報処理機器を用いることなく、高い通信の安全性を確保することができ、さらに、車両運行状態に応じた安全運転支援情報を適切かつ確実に配信できる安全運転支援システム及びこれに用いる車載器を提供する。
【解決手段】車載器300が、路側DSRC通信装置200から配信されている、暗号化された配信情報を受信し、自車両400が通信エリアを通過した路側光ビーコン装置100から受信した通知データに含まれる暗号化データで配信情報を解読し、解読した配信情報のうちから、当該通知データ及び自車両400の運転状況に応じて配信情報を選択して運転者に提示する。
(もっと読む)
逆走検知装置、および、逆走通知方法
【課題】車両が逆走していることを、高速かつ確実にユーザに通知する技術を提供する。
【課題を解決するための手段】
本発明の逆走検知装置は、車両に対して情報を配信する路側機から、当該情報の受信対象とされる車両の到来方向を示すデータを受信する通知処理部と、車両の現在位置および進行方向を特定する現在位置算出部と、路側機から受信したデータで特定される車両の到来方向と、現在位置算出部が特定した進行方向と、を比較して、車両が逆走しているか否かを検出する逆走判定部と、逆走を検出した場合には、検出した旨を通知する表示処理部と、を備える。
(もっと読む)
ステレオ測定システムおよび動画再生システム
【課題】状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムおよび動画再生システムを提供すること。
【解決手段】基準カメラで撮像された基準画像に第1フレームレートに基づいてデータ量削減処理を施して視認用画像データを生成し、基準画像と参照カメラで撮像された参照画像とから第2フレームレートに基づいて3次元状態把握画像データを生成し、視認用画像データと3次元状態把握画像データとを保存データとして保存することで、状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムを提供することができ、視認用画像データに連動して3次元状態把握画像データに基づく3次元情報を表示する動画再生システムを提供することができる。
(もっと読む)
走行支援装置
【課題】 ナビゲーション装置で得られた情報から判定された道路種別に対して、その道路種別に応じた適正な走行支援を行うことができる走行支援装置を提供する。
【解決手段】 本発明の走行支援ECU1における走行道路種別判定部10では、ナビゲーション情報に基づいて判断した自車両の走行路の道路種別であるナビ情報道路種別に応じたナビ道路種別信号を生成する。走行支援抑制部12では、走行道路種別判定部10から出力されたナビ道路種別信号や各種信号に基づいて、走行支援の抑制を判断する。支援内容決定部11では、自車両に対する支援内容を決定する。また、支援内容決定部11は、走行支援抑制部12から支援抑制信号が出力された際、ナビゲーション情報の利用を中止するとともに、走行支援を抑制する。支援内容実行部13では、支援内容決定部11より出力された支援内容信号に応じた走行支援を行う。
(もっと読む)
運転行動誘導システム
【課題】外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行う。
【解決手段】外部環境認識部2で認識した車両周囲の外部環境、ドライバ状態推定部3で推定したドライバが把握している外部環境、運転評価部4で評価したドライバの運転評価情報、運転操作情報に基づいて、ドライバ誘導部6が、ドライバに提示する誘導刺激の候補群を選定し、選定した候補群の中から現在の運転状態に合致した誘導刺激を選択して出力する。これにより、外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行い、運転の適切性を向上することができる。
(もっと読む)
周辺状況画像表示システム
【課題】視界状況が悪い場合でも、車両の運転手に確実に周辺状況画像を提供できる周辺状況画像表示システムを提供する。
【解決手段】設置された位置から延びる複数の道路に沿った複数の方向における周辺の状況を撮影して複数の周辺状況画像を得る撮影手段1、複数の方向のいずれか1つに位置する受信者からの要求に応じて複数の周辺状況画像のうちの少なくとも1つの周辺状況画像を選択する画像選択手段2および選択された周辺状況画像を受信者に送信する画像送信手段3を含む周辺状況画像送信装置7と、周辺状況画像送信装置7に複数の周辺状況画像のうちの少なくとも1つの周辺状況画像を要求する要求手段4、画像送信手段3から送信された周辺状況画像を受信する画像受信手段5および受信した周辺状況画像を表示する画像表示手段6を含む、受信者が有する周辺状況画像受信装置8とを備えている周辺状況画像表示システム13である。
(もっと読む)
走行支援装置
【課題】自車両の制御精度に左右されることなく、適切な走行支援を行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、走行制御の制御精度を取得する制御精度取得部4と、走行環境に基づいて進路候補を生成する進路生成部61と、制御精度取得部4において取得された制御精度に基づいて進路候補を評価する評価部62と、評価部62において評価された評価結果に基づいて目標進路を提示する進路決定部63とを備えている。
(もっと読む)
車両走行制御装置
【課題】この発明は、先行車の不安定な運転状態を精度良く検出し、運転者に警告し、通常よりも長めの車間距離で追従走行し、先行車を避けて車線変更することで、自車の不安定な挙動を抑制した追従走行が可能な車両走行制御装置を実現することを目的とする。
【解決手段】この発明は、自車が先行車との車間距離を維持した状態で追従走行するよう自車の車両速度を制御する車両走行制御装置において、先行車の車線幅方向における位置である横位置を検出する先行車横位置検出手段と、先行車横位置検出手段により検出された先行車横位置の時系列データを周波数解析する先行車横位置周波数解析手段と、先行車横位置周波数解析手段により解析された先行車横位置の周波数解析結果から先行車の運転状態を判定する先行車運転状態判定手段とを備えることを特徴とする。
(もっと読む)
移動体監視装置及びコンピュータプログラム及び移動体監視方法
【課題】多数の移動体を監視する監視者を支援する移動体監視装置において、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することにより、監視者の注意義務を軽減し、監視者が適切な判断をできるようにする。
【解決手段】ブロック生成部150は、複数の移動体(航空機)それぞれについて、占有ブロックを生成する。重複判定部170は、複数の移動体についてブロック生成部150が生成した複数の占有ブロックが重複しているか否かを判定する。占有ブロックが重複していると重複判定部170が判定した場合、注意喚起部180は、監視者(管制官)の注意を喚起する。
(もっと読む)
走行支援装置
【課題】自動走行とドライバの操作に基づいて走行を行う手動走行との切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、ドライバの操作に基づいて走行を行う手動走行と、自動制御により走行を行う自動走行とを切換可能な車両の走行支援装置であって、車両をあらかじめ入力された目的地まで自動走行させる。走行支援装置1は、自動走行の起動からの経過時間に従って自動走行の解除方法が異なる運転制御部を備えている。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援に必要な車両のみを検出する運転支援装置を提供することを課題とする。
【解決手段】車両が横断又は合流する際に横断する位置又は合流する位置における運転支援を行う運転支援装置であって、一方の車両が横断又は合流する際に横断又は合流される車線を走行する他方の車両を検出する検出手段と、横断又は合流される車線において一方の車両が横断又は合流する位置から離れた位置で他方の車両が直進できない状態であるか否かを検知する検知手段と、検知手段で他方の車両が直進できない状態であることを検知した場合、他方の車両を検出する検出範囲を縮小する検出範囲縮小手段とを備えることを特徴とし、検出範囲縮小手段は、検出範囲を一方の車両が横断又は合流する位置から直進できない位置までに縮小すると好適である。
(もっと読む)
リスク認識システム
【課題】ドライバの主観的要因を排除したリスクルールにより、システムが認識するリスクを真の意味での外部環境のリスクに精度良く一致させる。
【解決手段】走行中の自車位置情報から走行環境に応じた基本リスクを設定し、ドライバの特定操作が基本リスクに基づくルール条件に一致するか否かを第1ルール判定部4で反すると共に、第2ルール判定部4bでドライバの運転操作が、ヒヤリハット運転行動と外部環境リスクとの相関を表現したルール条件に合致するか否かを判定する。そして、ドライバの特定運転操作がルール条件に合致した場合に教師情報を生成し、この教師情報を用いて外部環境のリスク認識を行う。これにより、ドライバの主観的要因を排除し、システムが認識するリスクを真の意味での外部環境のリスクに精度良く一致させることが可能となる。
(もっと読む)
221 - 240 / 2,931
[ Back to top ]