
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
281 - 300 / 2,931
大型車両用安全運転支援装置
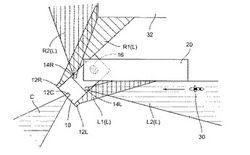
【課題】被牽引車を牽引する牽引車が回頭する場合に、巻き込み事故の発生を防止する大型車両用安全運転支援装置を提供すること。
【解決手段】本発明の大型車両用安全運転支援装置は、車両の周囲の障害物30を検出する複数の障害物検出手段12C、12R、12L、14R、14L等と、検出された障害物30の位置情報等から危険度を判定する危険度判定手段と、危険度判定結果を運転者に報知する報知手段と、を備え、障害物検出手段12C等として、牽引車10の側面側に配置され、一定値以上の舵角で牽引車10が回頭した場合、回頭方向側において被牽引車10の側面側かつ被牽引車20の斜め後方の領域L2(L)に存在する障害物30の存在を検出する回頭時障害物検出手段14R、14Lを備える。
(もっと読む)
移動体の存在判定装置及びこれを用いた安全運転支援システム

【課題】所望の移動体の存在判定を迅速かつ高精度に行うことができる移動体の存在判定装置及びこれを用いた安全運転支援システムを提供する。
【解決手段】移動体の存在を判定するにあたり、当該移動体を検出した路側移動体検出装置2の移動体検出装置情報に示される検出性能に応じて、移動体の存在判定に用いる存在確定閾値を更新する。
(もっと読む)
通信システム
【課題】通信装置を搭載した車両が自車両周辺に多く存在する状況であっても、適切なタイミングで衝突防止の支援をすることが可能な通信システムを提供する。
【解決手段】通信システム20は、車車間通信システムにより一定周期で送信されてくる他車両11の位置情報を含む他車両情報を取得する通信部21と、他車両情報と自車両10の位置を含む自車両情報とに基づいて、自車両10に他車両11が衝突する可能性を判定する衝突判定部22と、衝突の可能性があると判定された他車両情報に対して、次回の周期で送信されてきても衝突の可能性を判定しないように衝突判定部22を制御する衝突判定制御部23とを備えている。
(もっと読む)
車両の運転を支援するための装置
【課題】信号機に対して停止すべきである場合には、どの時点で減速を開始すべきかを運転者に通知して、早めの減速を促すよう運転を支援する装置を提供する。
【解決手段】車両の運転を支援するための装置は、車両の進行方向上の次の信号までの到達時間を算出し、信号機が青から黄または赤に変化するまでの時間を検出する。到達時間が、該変化するまでの時間以上であるとき、車両の運転者に通知を行う。通知を受けた運転者は、信号機が青の間に通過することが困難なことを認識し、速やかに減速操作を開始することができる。通知によって、減速操作を開始すべきタイミングが明瞭にされるので、より良好な燃費の運転操作を実現することができる。
(もっと読む)
車両の制御装置
【課題】発電・電動機で駆動される車両において車両前方の信号機の信号状態あるいは障害物に応じて発電・電動機の減速回生を制御することで運転者に違和感を与えることなく、燃費を低減させるようにした車両の制御装置を提供する。
【解決手段】車両を駆動可能な電動機(発電・電動機)と車両の位置を検出する車両位置検出手段と車両が走行する走行路の少なくとも信号機の設置箇所を含む地図情報とを備えると共に、信号機の点灯色を識別し(S14)、車両が信号機に接近すると共に、信号機の点灯色が赤であるとき、電動機の減速回生量GENを増加させる(S16からS22)。また、車両の進行方向前方に存在する障害物までの距離を検出し、車両が障害物に接近するときも、電動機の減速回生量GENを増加させる。
(もっと読む)
警報装置
【課題】ユーザに対する注意誘導の確度を高めることができる警報発生装置を提供する。
【解決手段】 警報装置1は、警報制御ECU3、スピーカ6、警報ランプ7、集音センサ8、及び発光制御部10を備える。警報場面が検出された場合、まずスピーカ6を介して警報音を出力する。集音センサ8がスピーカ6から発せられる警報音を検出し、検出したデータを発光制御部10に出力する。発光制御部10が、集音センサ8により検出されたデータに基づいて、警報ランプ7の点灯又は点滅制御を行う。これによって、警報音と警報光とが時間差をもってそれぞれ発生する。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】車間距離に関する運転者の車両操作を安全性の面から適切に評価することを可能とした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】自車両が“減速制御型の車間距離制御システムの作動条件速度以上で走行した距離”に対する“減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”から“前方車両に基づく要因によって減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”を引いた値の割合Xを算出し、算出された割合Xが所定割合(例えば、10%)未満であった場合には、車両が安全運転を行っていると診断し、安全運転が行われていることを評価するように構成する。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】他車両に道を譲る車両操作を安全性の面から適切に評価することを可能とした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】“ACCがONされてからOFFされるまでの走行中に自車両が所定速度以下に減速した回数及び停止した回数の合計”に対する“ACCがONされてからOFFされるまでの走行中に自車両が割り込み車両に道を譲った回数”の割合Xを算出し、算出された割合Xが所定割合(例えば、10%)以上であった場合には、車両が安全運転を行っていると診断し、安全運転が行われていることを評価するように構成する。
(もっと読む)
運転支援システム
【課題】車両の通過態様にあった運転支援を行える運転支援システムを提供する。
【解決手段】 運転支援システムは、道路側に設置される路側装置1と、車両Mに設置される車載装置2とを備える。路側装置1は、車両Mの通過態様を検出する通過態様検出センサ11、法規情報管理部16、法規遵守解析部17、及び支援レベル設定部18を有する。法規遵守解析部17は、通過車両の法規遵守状況を解析する。支援レベル設定部18は、解析された通過車両の法規遵守状況の結果に基づき車両Mに対する運転支援レベルを設定する。これにより、車両の通過態様にあった運転支援を行える。
(もっと読む)
車両の車線逸脱警報装置
【課題】車両の車線からの逸脱が予測されたときに、警報音を発生させる車両の車線逸脱警報装置において、車両の逸脱が予測されかつ車両の周囲の危険対象物が検出されたときに、危険対象物にも注意を向かせる。
【解決手段】車線逸脱警報装置Aは、車両Vの車線Lからの逸脱を予測する逸脱可能性推定部19cと、この逸脱可能性推定部19cにより車両Vの逸脱が予測されたときに、逸脱擬音を発生させる擬音生成出力部19dと、車両Vの周囲の危険対象物を検出する危険対象物検出部19bとを備えている。擬音生成出力部19dは、逸脱可能性推定部19cにより車両Vの逸脱が予測されかつ危険対象物検出部19bにより危険対象物が検出されたときには、逸脱擬音とは特性及び発生態様のうち少なくとも1つが異なる逸脱危険物擬音を発生させるようになっている。
(もっと読む)
標識表示方法、車載システム、RFIDタグ、標識送信装置、および標識表示装置
【課題】 注意を払うべき車両の存在を容易かつ迅速に運転者に把握させ注意喚起することで、事故を回避させて安全性の向上を図ることを目的とする。
【解決手段】 本発明の車載システム100は、日本道路交通法に定められた標識に付設されたRFIDタグ110と、そのRFIDタグ110から情報を読み取り、高齢運転者が運転していること(標識情報)およびGPS衛星160により特定される車両170の位置(送信位置情報)を近辺の基地局130に送信する標識送信装置120と、近辺の基地局130を通じてそのような情報(標識情報、送信位置情報)を取得し、画面上の地図を用いて高齢運転者が運転している車両170の存在を運転者に報知する標識表示装置150とを備える。
(もっと読む)
ドライブレコーダ
【課題】ドライブレコーダにおいて、画像記録のトリガを適切に行う。
【解決手段】ステレオカメラによって画像取得し、得られた3次元情報の内、車両周辺の空間情報を解析することで、トリガ判定を行う。具体的には、車両近傍の所定範囲を対象領域6とし、(a)のように、全域に亘って、ほぼ路面3を計測することができる場合は衝突危険性が少ないと判定してトリガを掛けず、(b)のように、歩行者7や駐車車両8が存在し、また先行(停車)車両9が存在する場合には、衝突危険性が高いと判定してトリガを掛ける。したがって、一般的な加速度センサを用いた判定と比べて、誤動作を低減することができるとともに、複雑な処理を必要とせず、簡易な手法で、衝突の可能性が高い、いわゆるヒヤリハットのシーンまで確実に記録することができる。
(もっと読む)
眠気判定装置及びプログラム
【課題】精度良く群発性瞬目を検出でき、精度よく眠気状態を判定することができるようにする。
【解決手段】抽出された瞬目の閉眼持続時間が所定時間(例えば1秒)以上となる区間における瞼開度の時系列データから、極大値及び極小値を求める。閉眼持続時間が1秒以上となる区間に複数の極小値が存在した場合には、求められた極大値から極小値に向かって、ある決まったステップずつ低い値にスライドさせていく要領で、可変閉眼閾値を設けながら、各可変閉眼閾値に対して、可変閉眼閾値を往復する瞬目を抽出し、瞬目間間隔を求める。求められた瞬目間間隔が1秒以下であって、例えば0.2秒以上であれば、群発性瞬目が起きたと判断し、群発性瞬目が検出される。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
運転支援装置
【課題】運転者の見切り発進を抑制することができ、運転支援の安全性を一層向上させることができる運転支援装置を提供する。
【解決手段】インフラ情報受信部8は、交差点における自車線側の信号機Aが赤信号である場合に、交差道路側の信号機Bの表示状態を取得すると共に、発進促進部14は、交差道路側の信号機Bの表示状態に基づいて情報提供を行う。例えば、交差道路側の信号機Bが赤信号である場合は、運転者が見切り発進をしてしまう可能性が高いが、交差道路側の信号機Bが青信号の終わり際や黄色信号や矢灯器表示などのように、赤信号になる前にその旨を通知することにより、運転者に間もなく赤信号が終わることを理解させると共に自ら信号機Aを確認させて運転を行うようにすることで、見切り発進を助長することを防止する。
(もっと読む)
車両用情報提供装置
【課題】 車車間通信手段のような装置を搭載していない車両に対する出会い頭の事故を未然に回避できるようにする。
【解決手段】 自車VAが、自車VAの位置、走行速度および走行方向を含む自車情報と、検出車両VBの位置、走行速度および走行方向を含む移動物情報と、それらが得られた時刻を含む時刻情報とを基地局20に送信すると、基地局20は前記各情報に基づいて地図データ上における検出車両VBの存在確率を算出するとともに、自車位置および検出車両VBの存在確率に基づいて交差点に存在する検出車両VBの予測情報を自車VAに送信するので、前記予測情報とに基づいて自車VAの乗員への注意喚起や警報を行うことで、検出車両VBとの出会い頭の衝突を回避することができる。その際、検出車両VBは自車VAと同じ装備を備えている必要がないため、全ての検出車両VBを対象として出会い頭の衝突を回避することができ、しかも各交差点毎にインフラを整備する必要がないので低コストで実現することができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】他車両の将来の挙動に応じて車線変更を行うための運転支援を行うことができなかった。
【解決手段】自車両の車線変更先を特定し、自車両の周囲を走行する他車両の走行予定経路を取得し、前記他車両の走行予定経路に基づいて、前記他車両が前記車線変更先に車線変更する必要性を判定し、前記他車両が前記車線変更先に車線変更する必要性に応じて決定される案内内容の案内を行う。
(もっと読む)
ナビゲーション装置
【課題】過去の走行経路の情報を利用して目的地を推定し、推定した目的地までの過去の走行経路の情報を参照して、逆走した経路区間(道路リンク)がある場合に、逆走した経路区間を含む逆走警告情報を予め報知する。
【解決手段】目的地推定手段16は、車両走行開始時の出発地をもとに過去に記憶した走行経路の出発地点を比較して目的地を推定する。制御手段10は、走行経路記憶手段14に走行経路を記憶する際、リンクの属性情報に示された進行方向とは逆方向に車両が走行したか否かを判別し、逆方向に走行したことを検出した場合には、逆走情報を該当するリンクに付加して記憶し、走行経路判別手段15は、車両の走行開始時に、目的地推定手段16が抽出した走行経路を参照し、進行方向とは逆方向に走行した道路のリンクを抽出し、逆走した道路のリンクを示す情報とともに、過去に該リンクを逆走したことがある旨を示す逆走警告情報を報知する。
(もっと読む)
駐車支援装置
【課題】周囲環境の影響で駐車目標であるマークの認識処理に適した明るさが得られない場合にも、マークを精度良く認識することができる駐車支援装置を提供する。
【解決手段】駐車スペースSの床面に設置された駐車目標であるマークMを車両100に搭載されたビデオカメラ10により撮影し、撮影された画像からマークMの認識処理を行う。運転者によりマークMが存在すると思われる画像上の位置が駐車目標位置指定部50により指定されると、駐車目標認識部20は、指定された位置を中心として一定範囲を測光領域Rとして設定し、この測光領域Rの輝度値に基づいてマークMの認識処理に適するようにビデオカメラ10の露光条件を制御することにより、画像の輝度値を調整する。
(もっと読む)
仮想車線を用いる車線離脱警報方法及びそのシステム
【課題】一方の車線境界線を認識することができないか、又は車線境界線を誤認識してしまう場合に、仮想車線境界線の概念を利用して、予測した仮想車線境界線を利用して警報を発令する車線離脱警報システムを提供する。
【解決手段】 走行中に車両の映像データを生成するカメラ部と、前記映像データから車線境界線を認識し、又前記車線境界線を認識できない場合は仮想車線境界線を設定し、前記車両が車線を離脱するかどうかを判定し、前記車両が前記車線を離脱すると判定した場合に警報信号を送信する映像処理部とを含む。
(もっと読む)
281 - 300 / 2,931
[ Back to top ]