
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
181 - 200 / 2,931
車両制御システム
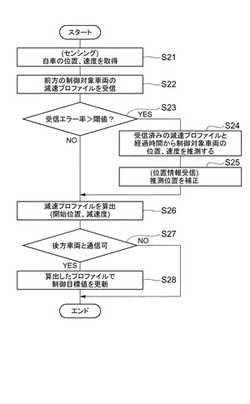
【課題】自車両と他車両との通信性能が低下した場合であっても、自車両と他車両との相対位置関係を制御することが可能な車両制御システムを提供する。
【解決手段】自車両と他車両との間の通信障害の有無を判定し、通信障害が発生していない通常時には自車両の加減速プロファイルを送信し、通信障害が発生している場合には自車両の位置情報のみを送信する構成とする。これにより、通信性能が低下した場合にあっても通信量を減らして通信性能を確保することができる。そのため、受信側の制御車両は、受信した情報に基づいて自車両と他車両との相対位置関係を制御することができる。
(もっと読む)
車両走行支援装置

【課題】道路の車線の実勢速度を正確に把握し、実勢速度に応じた自車両の車速制御を行うことを可能にする車両走行支援装置を提供することを目的とする。
【解決手段】本発明のシステムは、複数の車線をもつ道路上で自車両の走行を支援するものであって、自車両の周辺を走行する周辺車両の車両位置を通信により取得する車車間通信手段と、自車両との間で車車間通信可能な通信車両の台数を、道路の各車線ごとに計数する通信車両計数手段と、自車両との間で車車間通信が不可能であり通信車両同士の間を走行する間走非通信車両の台数を、道路の各車線ごとに推定する間走非通信車両推定手段と、を備え、道路の各車線のうち、通信車両の台数と間走非通信車両の台数と、の和で示される評価関数Jが最も大きい車線へ、自車両を誘導する。
(もっと読む)
画像処理装置及び運転支援装置
【課題】視野角を確保しつつ、鮮明な画像を生成する。
【解決手段】運転支援ECU1は、車両VC1の周辺の画像情報を生成する第1画像生成部101と、生成された画像毎に消失点VPの位置を求める消失点抽出部102と、車両の動きを検出する移動状態検出部106と、補正対象画像P0を選定する補正対象選定部104と、第1画像P1を選定する第1画像選定部105と、所定個数Nの第1画像P1に含まれる静止物の位置を、それぞれ、補正対象画像P0に含まれる静止物の位置と一致させるべく、所定個数Nの第1画像P1を、それぞれ、消失点VPの位置及び車両VC1の動きに基づいて補正して、補正後の画像である第2画像P2を生成する第2画像生成部111と、所定個数Nの第2画像P2を補正対象画像P0と合成することによって、補正対象画像P0を補正する画像補正実行部112と、を備える。
(もっと読む)
居眠り防止装置
【課題】 簡素な構成で覚醒状態を感知することができ、且つ、車両運転者が煩わしさを感じる虞が少ない居眠り防止装置を提供する。
【解決手段】 居眠り防止装置1は、車両運転者に警告音を発する警告部4と、車両運転者が警告部4からの警告に応えるための操作部3と、警告部4にて警告を出力させる制御部2と、を備える。制御部2は、警告部4が車両運転者に対して警告を出力してから車両運転者が操作部3を操作するまでの時間T2に応じて、次回の警告を出力するまでの間隔時間T1を変更する。制御部2は、定期的に前記警告を発生させる手動モードと、前記車両運転者による前記操作部3の操作に応じて作動する自動モードと、の切替えが可能である。
(もっと読む)
右左折支援装置及び右左折支援方法
【課題】信頼性の高い情報提示を行えるようにする。
【解決手段】対向直進車又は並走直進車の検出結果を用いて生成した右左折支援情報を路上の送信機から送信し、右左折車が路上の送信機から送信された右左折支援情報を受信して、この右左折支援情報と右左折車の走行状態とに基づいて情報提示の必要性を判断し、情報提示の必要性がある場合に対向直進車又は並走直進車が接近していることを示す接近情報を提示する。
(もっと読む)
無線装置
【課題】干渉信号の発生を簡易にユーザに通知する技術を提供する。
【解決手段】取得部30は、車両の存在位置に関する情報を取得する。無線部22は、取得した情報が含まれたパケット信号を送信するとともに、他の車両に搭載された無線装置からのパケット信号を受信する。復調部44は、受信したパケット信号から、他の車両の存在位置に関する情報を抽出する。通知部46は、抽出した情報をもとに、他の車両の存在位置を通知する。推定部50は、受信したパケット信号に対する干渉信号の存在を推定する。通知部46は、干渉信号の存在を推定した場合に、干渉信号の存在も通知する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両側方の障害物を検出すると、所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が所定の車線幅方向横位置に達すると、制御開始と判定して前記障害物への接近を防止する障害物回避制御を行う。その際、運転者の前記障害物側の隣接車線への車線変更の意図を検出した場合には、車線変更の意図を非検出であるときと比較して、前記制御開始の判定を早くする。
(もっと読む)
運転支援システム、車載装置、コンピュータ・プログラムおよび情報記録媒体
【課題】必要性を考慮して情報を報知することにより、乗員に対して情報報知の煩わしさを軽減する。
【解決手段】ナビゲーション装置21は、送受信器22によって受信した提供データと、自車両の走行状態の検出結果とに基づいて、乗員への情報報知の必要性を判断する。乗員への情報報知の必要性は、非優先道路を走行する車両との衝突可能性を判断することにより行われる。そして、ナビゲーション装置21は、情報報知の必要性がありと判断された場合に、提供データに基づいて、ディスプレイ25およびスピーカ26を介して乗員への情報報知を行う。
(もっと読む)
車両逆走防止システム
【課題】本発明は、サービスまたはパーキングエリアからの退出時に、入口路を走行していることを、自動車専用道路に進入する前に運転者に警告し、自動車専用道路を逆走することを防止する車両逆走防止システムを実現することを目的としている。
【解決手段】このため、地図データ記憶手段と、自車位置情報取得手段と、地図データ記憶手段の地図データと自車位置情報取得手段の自車位置から、自車が自動車専用道路からサービスまたはパーキングエリアへの進入を検出する進入検出手段と、進入検出手段の進入検出時に、自動車専用道路とサービスまたはパーキングエリアとの境界領域を入口路として記憶する入口路記憶手段と、地図データと自車位置から自車の入口路の走行を検出する入口路走行検出手段と、入口路の走行時に警告する警告手段を備える。
(もっと読む)
物体検出装置
【課題】適正な走行支援をするために必要な自車両周辺の物体の情報を取得することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、車両状態検出部2、環境状況取得部3、道路情報取得部4、検出制御部6及び検出部7を含んで構成されている。自車両状態予測部61は、自車両81の目標状態を取得する。検出部7は、物体を検出する。パラメータ設定部63は、目標状態に応じて検出部7における物体の検出特性を切替える。
(もっと読む)
運転支援装置
【課題】駐停車の際のドアの開閉が分かりやすく、搭乗者の利便性に優れた運転支援装置を得る。
【解決手段】車両のデータを記録した車両DB3と、データ解析部5と、表示生成部6とを備える。データ解析部5は、車両の周辺の障害物を検出する障害物検出部4からの障害物データ及び車両DB3からの車両データを用いて、車両並びにこの車両の全開時のドア及びこのドアの開閉の軌跡と、障害物との距離及び位置を算出する。表示生成部6は、データ解析部5からのデータと車両データと障害物データとを用いて、少なくとも1つの方向から見た、ドアを開けた車両及びこのドアの開閉の軌跡並びに障害物の画像を生成し、表示部8に表示するものである。
(もっと読む)
車両の走行安全装置
【課題】自車両が進行方向前方の先行車両に衝突する可能性を低減する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の走行路に交差する交差路を走行する交差車両を検出する交差車両検出部32と、交差車両の進路を予測する交差車進路予測部33と、自車両から所定距離以内の進行方向前方に存在する先行車両を検出する先行車両検出部35と、自車両の進路と交差車両の進路とに基づいて自車両と交差車両との衝突可能性の有無を判定し、先行車両の位置と交差車両の進路とに基づいて交差車両と先行車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両の走行路と交差路との交差点において、自車両と交差車両との衝突可能性が有ると判定された場合、又は、交差車両と先行車両との衝突可能性が有ると判定された場合に、所定の警報または前記回避制御を実行する車両制御部41とを備える。
(もっと読む)
車両制御装置
【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
オンラインリスク認識システム
【課題】実際の環境下での経験を自律的に学習して危険度を認識する際、多様な外界環境に対するロバスト性を向上する。
【解決手段】1次元上ループ上のSOMを走行状態に応じて複数のモデルに分割したモデル群を昼夜の別等に応じて並列化しておく。そして、認識モデル設定部5aで選択したモデル群の中から車速や舵角等の情報によって使用するモデルを選択することで、入力データの希薄な部分に対してユニットが配置されることを回避する。次に、認識学習部5bでSOMモデルに特徴量抽出部4で抽出した画像特徴量のみを入力して状態の認識及び学習を行うことで、性質の異なるデータ入力に対するロバスト性を向上する。更に、リスク認識部7で状態と教師との相関関係を求め、状態のリスクを学習・認識する。これにより、リスク認識の際の多様な外界環境に対するロバスト性を向上することができる。
(もっと読む)
意識低下判定装置及びプログラム
【課題】ドライバの意識低下状態を精度よく判定する。
【解決手段】レーン端までの距離L、車速v、及びヨー角θに基づいて車線逸脱予測時間TLCを演算し(102)、TLCが予め定めた閾値thrcより大きい場合には、車両がレーンに近接しており、危険な状況にあると判定して(104)、踏力センサ30及びトルクセンサ32で検出されたセンサ値を取得する(106)。走行開始から所定時間内である場合には、取得したセンサ値を覚醒時バッファに格納し(108、112)、走行開始から所定時間を経過した場合には、現在バッファに格納する(108、110)。覚醒時バッファに格納されたセンサ値の分布と現在バッファに格納されたセンサ値の分布とのマハラノビス距離dを演算し(114)、距離dが予め定めた閾値thrdより大きい場合には、ドライバが意識低下状態にあると判定する(116、118)。
(もっと読む)
リスク予測システム
【課題】現在のリスクだけでなく近い未来のリスクを認識し、ドライバへの警告や車両制御によるリスク回避を可能とする。
【解決手段】特徴量抽出部4で画像入力部2からの画像データから特徴量を抽出し、状態認識部5でN次元の特徴量ベクトルを1次元の状態に変換する。また、リスク情報抽出部6で車両データ入力部3から入力される車両情報からリスク情報を抽出して教師情報を作成する。リスク認識部7は、状態認識部5で得られた状態とリスク情報抽出部6で作成された教師との相関関係から状態のリスクを学習・認識する。更に、リスク予測部8は、時系列的な状態の遷移をマルコフモデルを用いてモデル化し、状態遷移確率をオンラインで学習更新することにより未来の状態を予測して対応するリスクを予測する。そして、リスク情報出力部9から現在のリスクと予測した未来のリスクをモニタや音声等により出力する。
(もっと読む)
画像処理装置、電子装置、および、画像処理方法
【課題】車両に搭載された表示装置に画像を表示する技術を提供する。
【解決手段】
所定の指示信号に応答して、車両の周辺を撮影する複数のカメラから取得される複数の画像に基づいた車両周囲の上方の仮想視点から車両方向をみる合成画像を生成する。この合成画像は、車両の周囲を周回するように仮想視点の位置が段階的に変更された複数の合成画像を表示装置に連続して出力される。これにより、ユーザが車両を目の前にした視点から車両の全周囲を確認することで、1つの画面で直感的に車両と障害物との位置関係を把握できる。
(もっと読む)
オンラインリスク学習システム
【課題】偏学習によるオンラインリスク認識の性能低下を防止する。
【解決手段】事前知識を保持するベースユニット3の機能と、ユーザの使用環境に応じた学習の進行によって認識性能が変化する学習ユニット4の機能とを融合ユニット5で融合し、最終的に融合ユニット5でリスク認識を行う。これにより、学習ユニット4で偏学習が生じた場合であっても、製品出荷時の初期の性能を維持するベースユニット3の認識性能をシステムに反映してリスク認識性能の低下を排除することができ、ユーザの使用環境に合わせて特化しつつ基本性能を維持することが可能となる。
(もっと読む)
運転操作評価装置
【課題】運転者による運転操作を車両の周囲の状況に応じて適正に評価する。
【解決手段】運転操作評価ECU1は、該車両の周囲に存在する他の車両、歩行者を含む移動体の該車両からの距離、及び、相対速度を検出する移動体検出部101と、検出された移動体の該車両からの距離、及び、相対速度に基づき、仮想的な優良運転者の運転操作を推定する優良操作推定部108と、該車両の運転者による運転操作を検出する運転操作検出部104と、優良操作推定部108によって推定された仮想的な優良運転者の運転操作に基づき、運転操作検出部104によって検出された運転操作の適否を評価する操作評価部110と、を備える。
(もっと読む)
画像生成装置及び画像表示システム
【課題】画像生成装置を様々な車種に搭載可能とする。
【解決手段】画像生成装置10aでは、合成画像の生成に用いる車種に応じた複数の車種別データ7が不揮発性メモリ40に記憶されている。そして、不揮発性メモリ40に記憶された車種別データ7とは異なる車種の車種別データ7が記憶されたメモリカード61から当該車種別データ7を取得して、不揮発性メモリ40に追加して記憶させることが可能である。このため、メモリカード61を利用して新たな車種別データ7を追加していくことで、画像生成装置10a及び画像表示システム100aを様々な車種に適切に対応させて搭載することができる。
(もっと読む)
181 - 200 / 2,931
[ Back to top ]